基于GNSS-R的城市近海岸水位高度反演研究
2021-07-12徐宁辉覃继前陆杰潘亚龙
徐宁辉,覃继前,陆杰,潘亚龙
(1.南宁勘察测绘地理信息院,广西 南宁 530001; 2.桂林理工大学,广西 桂林 541006)
1 引 言
海面高度变化对于人类活动具有重要影响,准确地监测海面高度变化对沿海城市建设、台风灾害分析等方面具有重要意义。传统的海面高度监测方法主要依赖于浮标、船舶及海面零散的探空等,这些方法存在探测结果数据量小、时空分辨率有限等缺陷。随着GNSS遥感技术的不断发展,利用GNSS反射信号来监测海平面变化成为一种新型遥感技术。自1980年欧空局(European Space Agency,ESA)指出GPS的L波段可以作为海洋散射计以后,针对GNSS-R海面测高技术的研究陆续展开[1];1993年欧洲太空局的Martin-Neria首次提出PARIS概念[2],其主要思想是利用被动式反射与干涉技术开展GPS L波段的海洋遥感;南阳等[3]人通过选取美国华盛顿州Friday Harbor岸边的SC02测站监测数据,进一步验证大地测量型GPS接收机用于海平面变化监测的有效性;胡媛等[4]人表明基于普通GPS接收机可以获得厘米级的海平面高度测量精度,反演结果与验潮仪测量结果之间的相关系数为0.86;牛余朋等[5]人通过将奇异谱分析和自回归滑动平均方法相结合预测近海海平面变化,表明该方法预测的相对海平面精度为0.035 7 m~0.060 7 m。然而,已有研究更多倾向于采用GPS来实现海平面高度变化的反演,多系统卫星导航数据没有得到有效应用。因此,本文基于岸基GNSS接收机监测的数据,开展基于GPS、GLONASS以及GPS+GLONASS的海平面高度变化反演研究,并与接收机附近的验潮站观测数据进行比对,分析海平面高度反演结果的精度。
2 原理与方法
SNR是衡量GPS信号的指标,其表征信号和噪声的强度。它们之间的矢量关系如图1所示[6]。
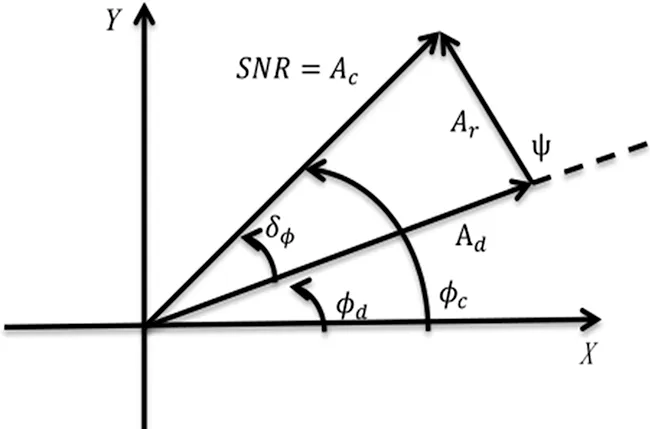
图1 直射和反射信号的矢量图
图中,Ad是直射信号矢量的振幅。当反射信号不存在时,SNR=AC=Ad。φd是载波相位的相位角。反射信号矢量的振幅为Ar以及相对相位角为ψ(相对于直射信号矢量),AC为直射信号和反射信号合成后的矢量的振幅,φc为合成信号的相位角,δφ=φc-φd为合成信号矢量与直射信号矢量的夹角。具体公式如下:
(1)
由于测量型接收机的天线被设计为右旋圆极化,主要接收来自卫星的直射信号,尽可能抑制由于多路径影响产生的卫星反射信号。因此,直射信号与反射信号振幅的关系为:
Ad≥Ar
(2)
由于Ad和Ar的差值较大,通过低阶多项式拟合可将二者从SNR中进行分离,进而将趋势项Ad消除。趋势项Ad消除后,多路径信号的振动幅度可表示为[7]:
(3)
式(3)中,h表示接收机的相位中心与反射面的垂距,λ和θ分别表示载波的波长和卫星高度角。记t=sinθ,f=2h/λ,则式(3)变为:
Ar=Acos(2πft+φ)
(4)
f中含有待求参数h,并且θ为随时间变化的已知量。考虑到sinθ时间间隔的不均匀变化,导致观测序列无法整周期截断,无法直接采用傅立叶变换求解。因此,本文将采用Lomb-Scargle(L-S)谱分析方法进行处理,公式如下[8]:
(5)

tan(2ωτ)=∑sin(2ωti)/∑cos(2ωti)
(6)
因此,首先通过L-S谱分析计算f,然后根据f=2h/λ计算得出接收机相位中心到海面的垂直距离h,如果接收机相位中心至架设点的高程为H,则海平面高度为HW=H-h。
3 实验分析
本文选取的实验数据来自BRST测站(如图2所示),位于法国西海岸的BREST港(48°22′49.78″N, 4°29′47.75″W),接收机天线距海面 17 m,采用的GNSS装置为Trimble NETR9型接收机。该接收机配备了一个没有整流罩的Trimble TRM57971.00型扼流圈天线,采样率为 1 Hz。该测站能够同时接收GPS、GLONASS、Galileo和BDS的观测数据,均可从IGS官网(http://www.igs.org)获取。本文实验所采用的海平面高度变化参考值来自位于BRST站北方向 500 m处BREST港验潮站(48°22′58.44″N,4°29′42.14″W),采样率为 1 min,观测数据可从REFMAR官网(http://refmar.shom.fr/)下载。

图2 BRST站周围环境
3.1 数据选取
由于GNSS接收机安置在海岸线上,所收到的GNSS反射信号不仅来自海平面反射,而且受测站周边陆地表面的反射。如果不剔除陆地表面反射信号,直接影响到海平面高度的反演精度。因此,本文利用菲涅耳反射区域原理,根据BRST站附近的海平面覆盖范围,结合有效反射区域的大小来确定卫星起始高度角,使得反射信号全部来自海平面。依据BRST站周围的观测环境、接收机观测卫星的天空视图以及通过有效反射区域反算得的卫星高度角对数据进行选择后,BRST站的起始/终止方位角、卫星起止高度角、GPS每天平均观测量以及利用GPS L2载波反演的最大有效理论反射区域半径等信息统计如表1所示。

数据选择结果 表1
3.2 实验结果
为了验证本文算法的可行性和有效性,选取BRST站的2015年第107天~113天的观测数据进行实验分析。首先经Rtklib软件解算观测数据得到信噪比、卫星高度角和方位角信息,然后基于SNR反演海平面的原理方法,通过matlab软件编程进行海平面高度的反演,最后将反演结果与潮位站所观测的相应潮位数据进行对比分析。单系统GPS和GLONASS反演结果与参考值之间的关系,分别如图3和图4所示。图中,蓝色曲线是潮汐计观测结果(观测的基准是平均海平面),绿色棱形为GPS反演结果,红色棱形为GLONASS反演的结果。
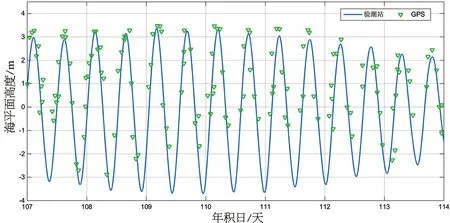
图3 利用GPS数据反演海平面高度结果
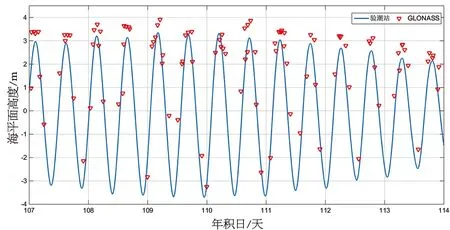
图4 利用GLONASS数据反演海平面高度结果
从图3和图4可见:利用GPS和GLONASS数据反演的结果与验潮仪观测的结果基本一致,但是仍有部分结果偏离了曲线,这可能是由于海面是动态变化的过程,某些时刻海面波浪起伏较大,导致部分反演结果与验潮仪观测值偏差较大。同时,由于低阶多项式拟合方法自身存在的不足,导致了直接信号消除不完整,致使进行L-S谱分析时的偏差较大,获取的海平面高度反演结果存在一定的误差。结合表1进一步分析发现,BRST站每天的观测次数与表1中的平均每日观测数有很大的不同。在图3中,BRST站的观测个数在第107天最高,在第109、111、112和113天最低,分别为26个和17个。而利用GLONASS比使用GPS系统每天可反演的个数更少,时间分辨率较低,其主要原因是GLONASS系统的卫星个数少于GPS系统。
为了进一步分析采用多系统联合反演海平面高度变化相对于单系统的优势,本文将GPS和GLONASS联合反演,结果如图5所示。
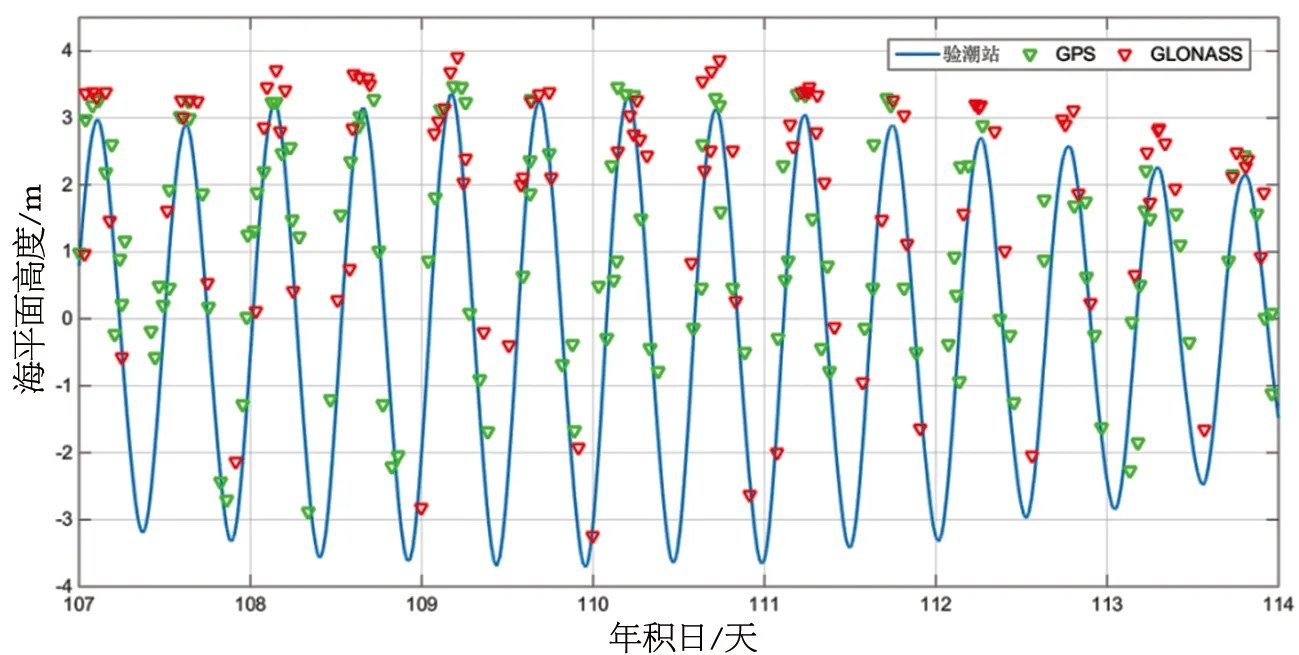
图5 GPS和GLONASS联合反演结果
从图5可看出:验潮仪观测结果与GPS和GLONASS联合反演的结果相差并不大,且与验潮仪观测的结果基本一致,能够保持在107天~109天期间连续监测海平面高度的变化。而且,GPS和GLONASS联合反演的时间分辨率有所提高。因此,使用多系统对海平面进行反演可以提高反演结果的时间分辨率,所以今后的岸基GNSS-R最好使用可以接收多系统信号的接收机。
3.3 精度分析
为了综合评定本文算法的反演结果,采用相关系数(r)、均方根误差(RMSE)、最大偏差和平均偏差进行统计分析。首先使用spline样条插值函数对验潮仪1min的观测数据进行插值,得到与反演结果同一时间的验潮仪观测数据,然后对单系统GPS、GLONASS和两者联合反演结果与验潮仪观测数据进行相关性分析,结果如图6~图8所示。图6中的绿色圆圈代表以验潮站观测数据为x轴,以GPS反演结果为y轴的散点图;图7中红色圆圈为以验潮站观测数据为x轴,以GLONASS反演结果为y轴的散点图,图8中绿色圆圈代表GPS、红色圆圈代表GLONASS。
从图6、图7和图8的(a)可看出:GPS反演结果与验潮站观测数据的相关系数r为0.89,GLONASS反演结果与验潮站观测数据的相关系数r为0.91,将GPS和GLONASS联合反演结果与验潮站观测数据的相关系数r为0.89。三者的相关系数相差并不明显。结合图(b)分析发现,反演结果相对于验潮站观测数据存在一定的系统误差,这主要是由于接收机本身产生的误差造成的。

图6 GPS反演结果与验潮站观测数据关系图
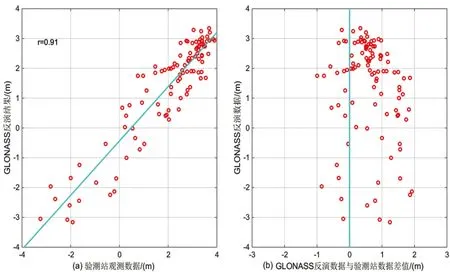
图7 GLONASS反演结果与验潮站观测数据关系图
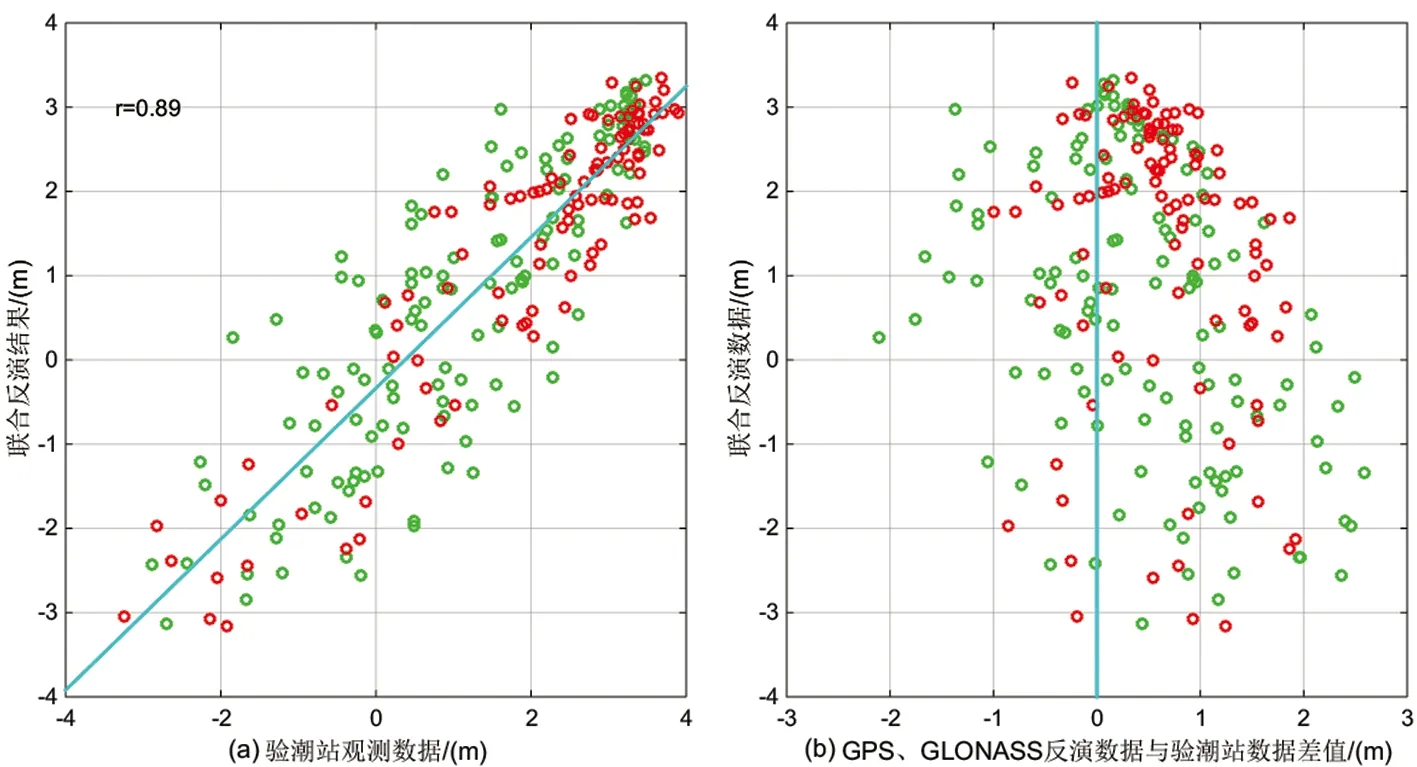
图8 GLONASS和GPS联合反演结果与验潮站观测数据关系图
进一步统计单系统GPS、GLONASS和两者联合反演结果的均方根误差(RMSE)、最大偏差和平均偏差,如表2和图9所示:
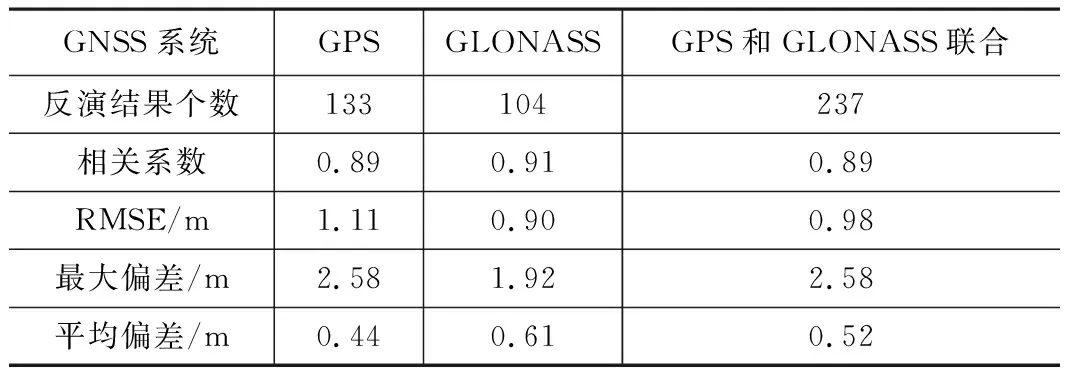
BRST站反演结果精度统计 表2

图9 双系统各卫星反演结果
结合表2和图9分析可进一步看出:采用GPS卫星反演海平面高度变化,其结果波动性较大,而采用GLONASS卫星的反演结果相对较为稳定。GPS的RMSE低于GLONASS,但GPS的平均偏差优于GLONASS,且GPS反演个数多于GLONASS反演个数,GPS的时间分辨率高于GLONASS的时间分辨率。可见,采用单系统GPS或GLONASS在反演海平面变化方面各有优势和缺点。然而,将两者联合反演海平面高度变化,既增加了反演个数和时间分辨率,使得反演结果更加接近验潮站的变化,且RMSE和平均偏差介于两者之间,使得反演结果更加稳定和精确可靠。
4 结 论
本文基于BRST测站的观测数据反演海平面高度变化,对比分析采用单系统GPS、GLONASS以及两者联合反演的结果,结果表明:①利用GPS系统、GLONASS系统和两者联合反演的结果与验潮站观测值之间的相关系数为0.89、0.91和0.89,相差并不明显;②单系统GPS和GLONASS在反演海平面变化,采用其反演的时间分辨率较低,反演过程不够稳定。③联合GPS和GLONASS反演海平面变化,既增加了反演个数和时间分辨率,使得反演结果更加接近验潮站的变化,且更加稳定和精确可靠。
