基于自平衡过驳坞的压载系统设计与分析
2021-07-09党军鹏
党军鹏
(上海振华重工(集团)股份有限公司,上海 200125)
0 引言
自平衡过驳坞是一种适用特种工程装备下水/回收的过渡船坞,通常不设置动力装置,仅在码头或靠岸的水域使用。将岸上建造好的工程设备,如平台、船舶等海工装备过渡到水上,或将水上的这类装备回收过渡到岸上或直接在坞上维修使用。在工程装备下水/回收过程中,该坞能根据上移装备载荷的不断变化来调节不同方位的压载水量,从而实现前后、左右和上下的三维状态,保持坞的状态处于上驳/下驳要求的平衡状态,以适应工程装备上下坞过程的平稳安全。
该过驳坞的自动平衡主要通过压载水的装载和驳出来维持坞的平衡。通过采集压载舱的液位遥测系统测量的各压载舱的装载数据,4角吃水系统测量的坞吃水深度和负载臂传感器感知船舶的侧向受力大小,将收集到的坞上各感知参数传输给装载计算机,装载计算机通过算法计算并输出压载水的调载参数给中央控制系统,中央控制系统来协调控制各压载泵的启动停止及不同负荷运行,并控制系统中各中转遥控阀和压载舱的进出阀门开关或变流量开度,达到对压载量的控制,从而控制坞的平衡状态。
1 压载水系统设计基础
在过驳坞工作过程中,压载水系统的设计必须满足以下工况:
1)岸坞对接。岸上的海工装备通过小车运送或滑移的方式移动到过驳坞上或将过坞驳上的设备过驳上岸,需通过压载水调节保持过驳坞的主甲板面和岸基一直保持平齐,以便装备顺利过驳。
2)驳坞下潜。在定点位置通过打压载使过驳坞下潜到一定深度,将过驳坞上的海工装备移动到水面上,这种工况下需要往各压载舱输入压载水,在保持船体稳性和弯矩满足许用值的条件下,以最短时间完成下潜作业。
3)接驳上浮。将过驳坞下潜到一定水深后,水面上的海工装备移动到过驳坞主甲板面正上方,在船体吃水保持水平的情况下,将压载舱内的压载水排出舷外,船体上浮并托起海工装备,达到回收装备的目的。
4)定点作业。这种工况下,过驳坞将处于静态,只作为一个维修平台使用,无需压载水的输入排出作业。
在过驳坞整个作业过程中,从开始操作到最终装载结束,其载荷是一个连续不断变化的过程。这个过程中,坞的重心高度、装载货物的重量和潮位吃水都在不断的变化中,是一个动态的过程,需要对每个状态作实时定量化分析和计算,使过驳过程中坞的装载甲板与码头始终保持在一个水平面上,以保证过驳的连续安全运行,同时保证坞所承受的各种剪力和弯矩在许用范围之内。倘若在此过程中出现超过稳态,受力超过许用值则发出报警,暂时停止自动操作转为人工干预直到各参数在许用范围内之后,重新开始进入自动操作状态。在上述执行过程中,压载泵的容量、压载舱的舱容和压载系统管路的设计都将影响整个进程的顺利与可操作性。
在过驳坞沉浮过程中,压载舱水量调节受压载泵排量限制,沉浮与平稳调节需要一段调整时间,调节时间越短则调整状态的反应速度越快。因此,对泵的大小和管网设置与舱室的匹配提出较高要求,需要在短时间内保持过驳坞的平稳,同时还需要兼顾整个系统设计的经济性和可操作性。压载舱布置图如图1所示。
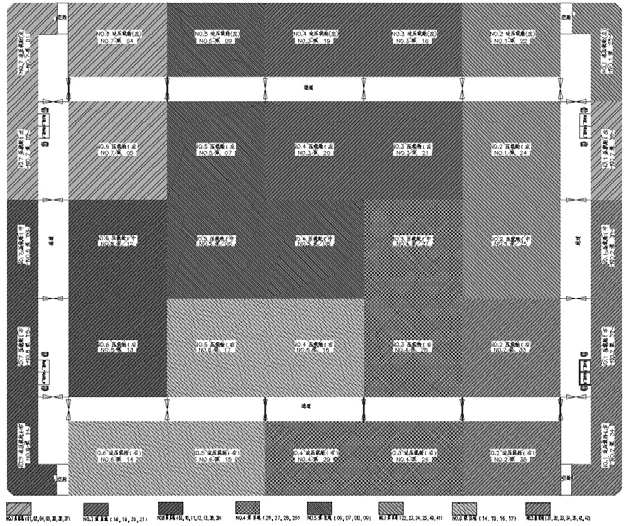
图1 压载舱布置图
2 压载系统设计
2.1 压载水系统选择
压载水系统的目的是适应各种装载状况,保持适当的排水量、调整吃水、纵倾和横倾,确保一定的航行性能,保持恰当的船舶初稳性高度(GM),获得适当的复原力,减少过大的弯矩和剪切力[1]。不同类型船舶对压载水的依赖有较大区别,例如集装箱船对压载水依赖性低,而散货船和油船则依赖性高;依赖性的高低会影响泵的排量选择。该过驳坞对压载水的的依赖性很高,上下坞及沉浮过程中坞态的调整完全依靠压载水来调节,考虑到整个过驳坞的尺寸为100 m×80 m的方型体、压载舱的均态分布(见图1)以及沉浮时间8 h的要求,通过压载量的计算,选择配置8台1 200 m³/h的电动调频压载泵,相对于压缩空气压载,这样均布式多台泵的配置能够满足自动调载灵活快速的要求。在泵与压载区域的划分上,充分考虑过驳时的方向性,装备在过驳坞的左右舷上坞/下坞。因此,尽可能多地在该方向设置4台泵来调节压载水的输入和排出,以实现最短时间内的坞体平衡。由于该坞几乎为定点做业,压载水系统的设计无需考虑压载水微生物处理的要求[2],因此不考虑配套压载水处理装置。
2.2 压载系统设计要点
压载水系统设计要点如下:
1)采用环式管路设计(见图2)。可实现压载舱之间压载水互相调拨,提高船舶稳性[3]。
2)压载水舱贯穿全船。为了操作的便捷,均采用远程控制阀门,即阀门遥控。
3)由于船舶底部布置了管弄,遥控阀门选用系统设计较简单的电液式和纯电动混合遥控阀,省去液压管路、液压泵、液压器件和液压柜等附属设备及附件,阀门布置在管弄内,方便后期维护保养。
4)鉴于压载水系统以含盐量较高的海水为主,海水对管路具有腐蚀性,管路材料选择需兼顾耐蚀性和经济性,需在材料价格与耐蚀性及重量之间找到平衡点,通常可选材料为镀锌碳钢管、耐海水的双相不锈钢管、玻璃钢管和铜镍合金管。表1为常用管路材料对比[4],具体需经综合考虑进行设计。
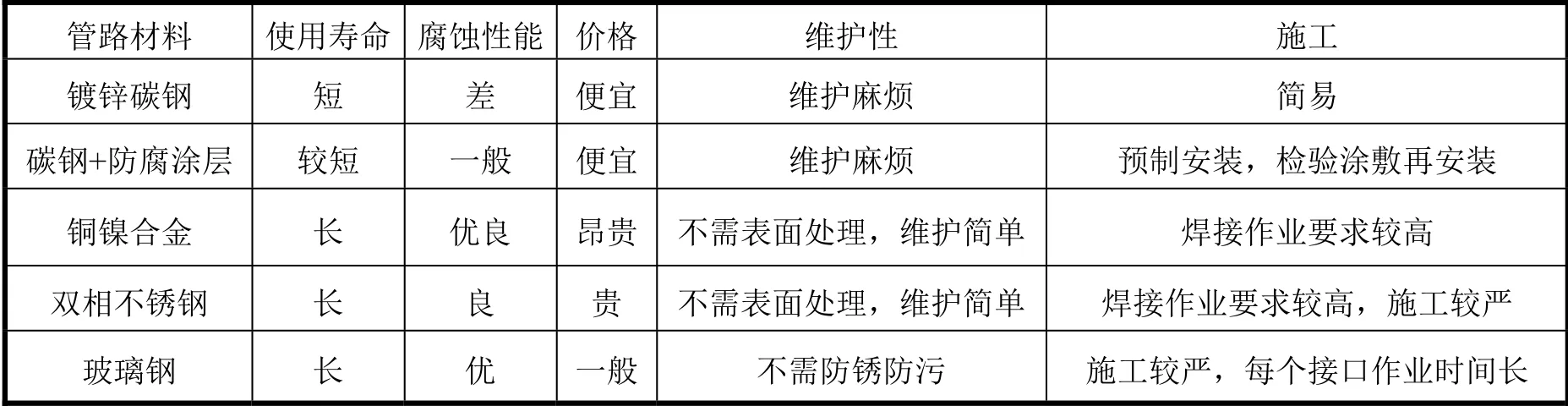
表1 常用管路材料对比
2.3 系统组成与工作原理
压载水系统主要设备为8台带变频的电动压载泵、变频柜、遥控阀、配电柜、中控台、43个压载舱和连接各舱及设备的管路系统。
为了配合压载系统的自动调拨,实现压载的灵活快速性,压载泵组由8台泵分割成4个压载单元,每个单元2台压载泵通过压载总管来联通,通常情况下通过遥控阀来阻断,这样能满足区域压载互驳调载和压载泵故障时采用备用压载的工况,如图2所示。每个压载单元中的2台泵也可以相互备用,能够驳运彼此负责压载区域内的压载水,防止其中1台泵故障而其负责区域无法打排压载水。每台压载泵各自所对应区域的压载量尽可能地相近,这样可以在要求的压载时间内以最短时间发挥泵的最大能力,完成压载调拨。每个压载舱布置1根独立的进水、排水用的压载水管, 管路上串联1只电动式遥控蝶阀, 连接到相对应的区域泵组进行打压载和排压载。每台压载泵有独立的海水门进口和排舷外出口,经遥控阀来控制其进出压载水的流向,同时该系统的设计也考虑到了重力压载的工况[5],在没有严格要求压载时间的工况下,通过遥控阀的隔离设置隔离压载泵,海水在重力作用下进入压载舱,实现经济性压载,其流量的大小也可以通过遥控阀的开度调节来控制,为重力压载下的自动调载提供可能性。
打压载开始后,压载舱的液位遥测会实时测量和反馈每个压载舱的水量,4角吃水测量坞的每个角吃水深度,这些参数经计算处理后换算成坞的浮态,然后控制压载泵和压载系统中各隔离阀的开关或开度以及泵的排量大小来调节坞的状态,达到装卸时要求的姿态。
压载区域的划分根据泵的位置就近设置对应的压载区域,同时考虑上下坞时压载泵能力的发挥,将几个单一压载舱通过压载管连接到同1台压载泵上进行打排压载水。作为压载系统的配套系统,其透气系统根据船坞的结构特点结合稳态要求,采用区域组合透气,即单一压载泵对应的压载区域采用同一组透气,压载舱顶部互通,这样即可简化使透气系统,同时也大大节省了透气管并减轻了船体重量。
2.4 压载过程中的过驳坞自平衡
调平衡流程图如图2所示。
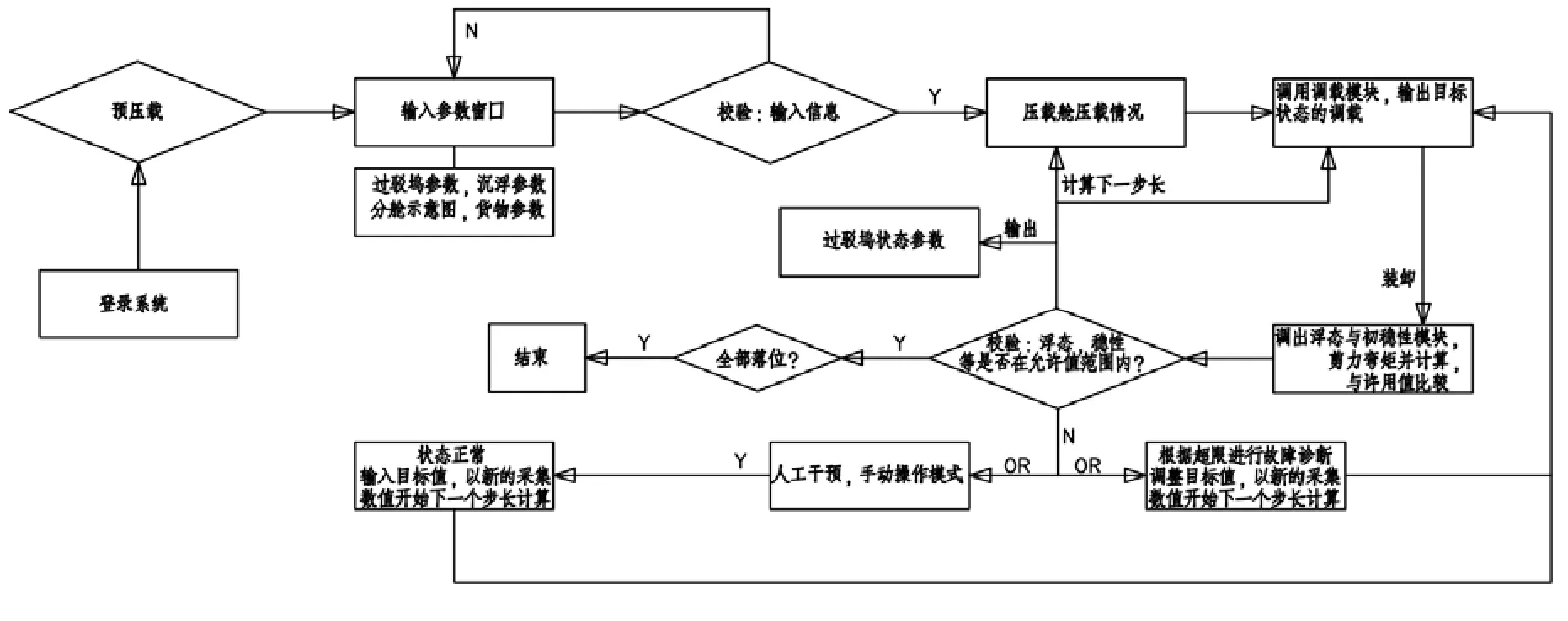
图2 调平衡流程图
在压载调节数学模型和逻辑的基础上,构建仿真过驳坞自平衡数值模型,将各监测参数与模型及调载进程相结合来设置调节算法,在此算法基础上进行过驳坞装卸自动平衡调节。首先输入过驳坞几何建模、压载系统及泵阀建模、待装装备几何建模和重量重心等参数,根据调载模型计算的调载方案对过驳坞进行相应压载水排注操作,并实时显示过驳坞的浮态;在装卸过程中,根据浮态计算过驳坞的稳性及强度,并实时记录浮态、稳性、总纵强度的时历曲线。为了提高整个装卸过程的安全性,若某一设定值超限则报警,立刻停止自动压载调平衡或沉浮进程,并进入人工干预的手动调节状态;经过人工干预后的过驳坞各项参数处于设定许用值范围,各项报警解除之后,再次进入自动调载的自平衡状态;如此反复,直到装卸任务完成或驳船坞的吃水状态达到预设调载状态,则整个进程结束。在初始使用的过程中设置人工干预来保证系统的绝对安全,经过一段时间的使用后可以对调平算法进行进化升级,从而达到完全的自动平衡调节。
3 压载时间及管路阻力分析与计算公式
压载系统的设计主要依赖许可的压载操作最大操作时长、上下驳时潮汐的变化、压载量的大小和经济性等综合因素。在运输船舶上,通常留给打压载的时间为8~10 h[2],依据该时长,通过全船的最大压载量来计算出压载泵的排量。根据压载泵的排量和压载时间计算出压载过程中压载水的流速:通常选用的压载管路的流速以2~3 m/s为宜,流速不宜过大。泵的压力选择需根据其所在管路上的沿程阻力损失和最大相对提升高度来确定,其中沿程阻力损失包括管路摩擦阻力和阀附件的阻力损失,根据泵的安装高度和位置考虑泵的汽蚀余量是否满足泵的吸上高度要求。
压载过程的最大用时计算为)

式中:T为压载时间,h;P为泵的排量,m³/h;Q为总的最大压载量,m³;N为压载泵的数量。
压载系统中管路设计流速为:

式中:D为压载管内径,m;Q为单台压载泵的排量,m³/h;v为压载管内的流速,为2~3 m/s。
管路引起的沿程阻力损失按下述公式计算[6]:

式中:hf为管路压降,Pa;λ为摩擦阻力系数λ=0.1(1.46ε+100Re−1)0.25;L为管子长度,m;d为管子内径,m;v为管内截面流速,取3m/s);Q为流量,m³/h;ε为相对粗糙度Δ/d;Re为雷诺数Vd/μ;μ为海水运动黏度,1.05×10−3m2/s;g为重力加速度,取9.81 m/s²;ρ为密度,kg/m3。
阀附件引起的沿程阻力损失按下述公式计算[6]

式中:hm为附件的压降,Pa;ξ为摩擦阻力系数;v为管内截面流速,取3 m/s;Q为流量,m³/h;d为管子内径,m;g为重力加速度,取9.81 m/s²;ρ为密度,kg/m3。
4 结论
在自动调载过驳坞设计时,需根据其对稳性浮态调节的高要求,采用传统的多点分布式变频泵及多区域协同压载来满足调载过程中对灵活快速的压载需求。将压载泵尽可能地分布划分的到每个压载区块,每个区块通过总管联通,形成网状的、相互独立而又能相互备用的压载管路系统。这将更好地满足整个项目提出的自动化操作要求,设备配备和管路大小的设计都将围绕这一核心要求展开,从总体的设计过程和结果可以得出:该系统的设计能够配合过驳坞自动调载的要求。
