海洋工程船舶吊机矢量控制变频器参数整定简介
2021-07-09刘晓君
刘晓君
(海洋石油工程股份有限公司安装事业部)
0 引言
在海洋工程船舶吊机中,电机的控制系统有两种控制模式:V/F控制模式和FOC控制模式。基于V/F控制通常通过设定输出频率和输出电压,并保障电压和频率的比值为一个常数,以控制电机转速。这是一种开环控制模式,在实际使用中很少用到,在这里我们不作详细介绍。FOC(Flux Vector Control or Field-Oriented Control)控制模式是实际使用中用到的一种控制模式,这种控制模式将对磁通的控制从力矩控制中分离出来,是一种闭环控制。
在FOC模式中,逆变器控制包含以下参数值的调节:电流Isd(磁通电流)、电流Isq(转矩电流)、磁通量、转速。每个参数均用闭环调节,调节的方框图如图1所示。
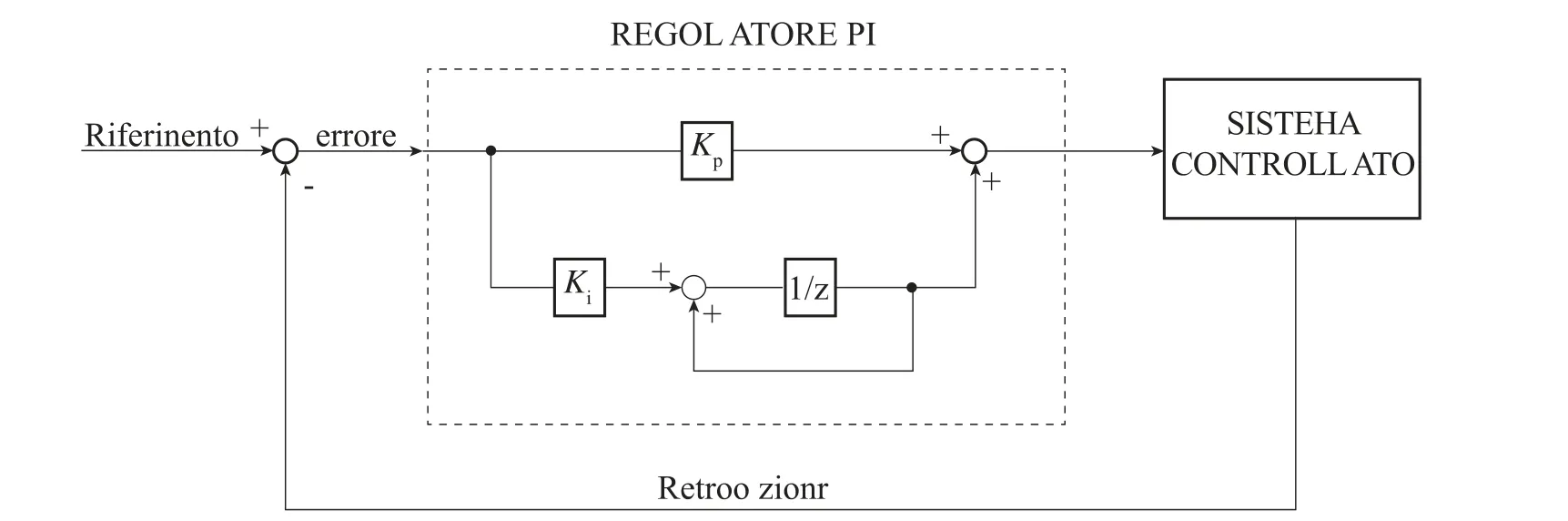
图1
这种控制的特点是将反馈信号源于被控系统。将设定值减去这个显示被控变量的实际状态的反馈信号。设定值和反馈值的差值确立了偏差信号的振幅和相位,并将信号提供给PI控制器;控制器的输出影响被控系统,使其减少误差信号。典型的被控量的阶跃响应的变化趋势如图2所示。
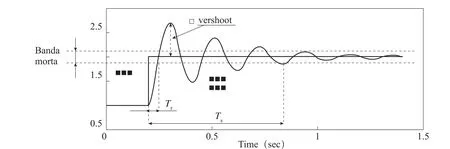
图2
从这个典型的变化中我们可以看出闭环系统的响应可以由以下变量来描述。
上升时间Tr:上升时间为参考的阶跃变化的时间起点到被控变量的值达到静差带的值之间的时间。
超调量:被控变量达到的最大值和设定值之间的相应差值。
稳定时间Ts:被控量最终达到静差带的时间点与加入阶跃干扰的时间的差值。
静差带:被控变量的最小变化在一个平均的变化动作中。因此,静差带就是一个控制器无法使被控系统达到准确值的一个“误差”。
被控变量随阶跃干扰的时间变化趋势可以通过选取合适的控制器增益来修改,控制器增益如下:比例增益Kp;积分增益Ki。
比例增益Kp是偏差信号的一个系数,以此产生一个相应的比例变化,增加比例增益可以缩短上升时间Tr。太大比例增益可能会引起系统的不稳定。
积分增益Ki是偏差信号的积分系数;这样可以产生一个相应的动作使得被控变量和设定值之间的偏差减小。过大的积分增益会引起系统的不稳定。
控制器的整定由以下两项得出:在无负载马达时的整定、满负载时马达的整定。
无负载马达的整定涉及以下回路:Isd电路、磁通量、转速。
带负载马达的整定只有在想修改Isq转矩电路回路的动态参数并且/或由于负载变化引起的速度变化,其中在满负荷的任何时候均检测到系统不稳定。
整定函数可以由属于当地测试控制(LocalTestCtrls)菜单中的SelTn参数的方法获得。下表中的参数为可能遇到的参数。

表
1 Isd控制器的整定
Isd电流控制器的整定函数仅仅在驱动处于准备状态时可被激活。它的激活设定为:

如果想在驱动未在准备状态时进行整定,控制将自动设置为:

Isd电流控制器的整定函数可以防止外部回路(通量、速度)失效并且设定Isq的转矩电路控制器的设定值为0。并且,它可以提供一个方波信号作为Isd电路控制器的初始值。方波具有两种电平,主要表现为高电平和低电平,这两种电平可以通过LocalTestCtrls菜单中的参数I sdM1和I sdM2的平均值来设定。这些参数的默认值为:

方波的周期可以通过同菜单中的TnPer参数进行修改,默认值为8s。
为能够整定,模拟的输出信号1Sig,2Sig和3Sig能够自动配置以成为对整定举例有用的控制器信号。为了能够完成控制器的整定,驱动需一直运行并且可以调整控制器的比例和积分增益(参数IsdKp和IsdKi属于菜单FOC Regulators)。
完成控制器整定的程序如下:
——设积分增益为0;
——增加比例增益使得反馈信号达到要求的稳定性(超调量可接受);
——增加积分增益直到逆变器达到要求的稳定性。积分增益可以减少稳态误差,它必须取一个在超调量(尽量的小)和稳定时间(尽量的短)折衷的值。
图3是初始值,反馈和Isd控制器输出的整定例子。图3d显示的是一个好的整定。
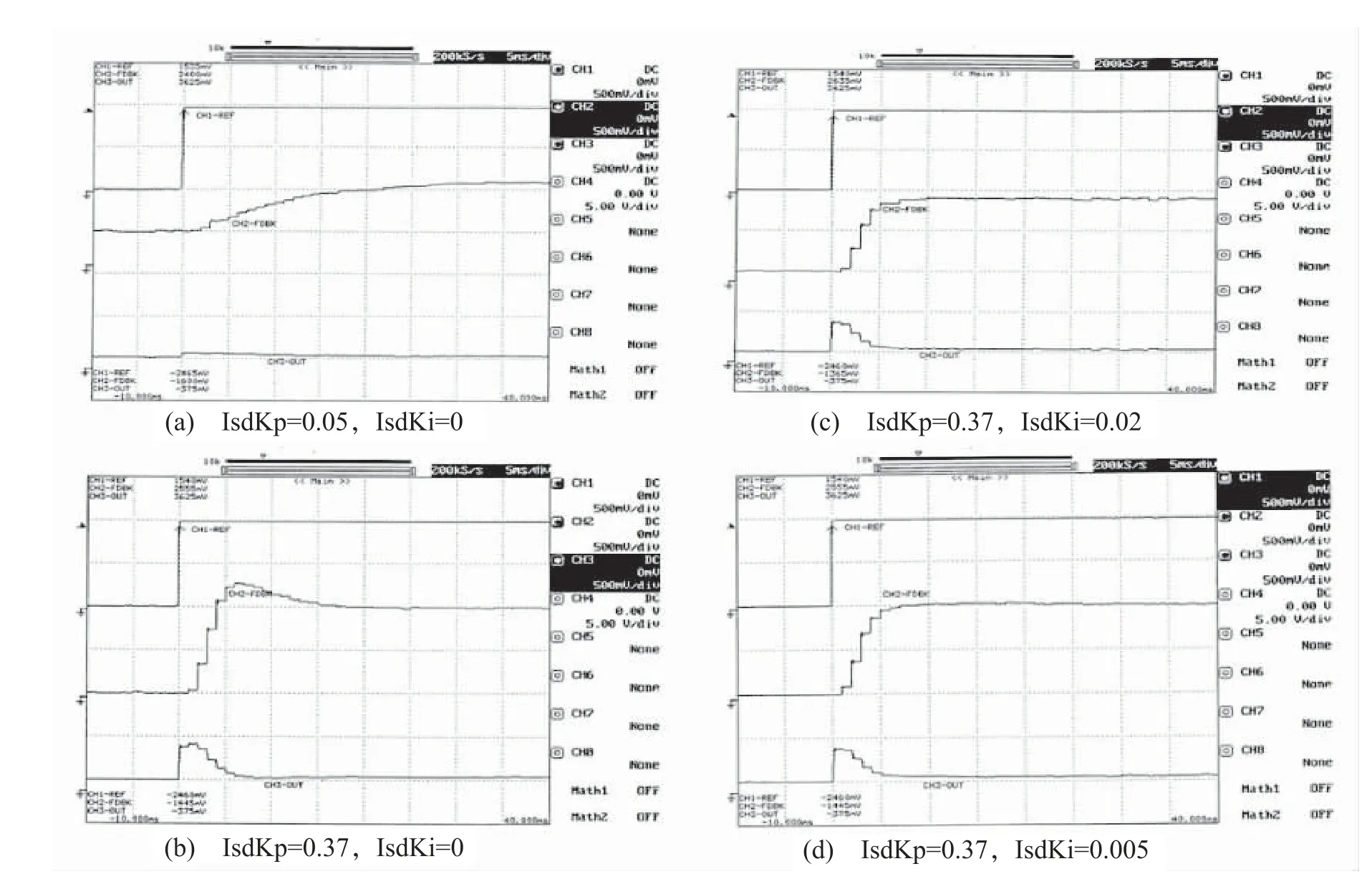
图3 Isd控制器输出整定
注意Isd电流控制器,通常我们试图得到一个上升时间在5~10ms范围内的值,而且没有任何超调量。一旦确定看控制器参数的合适的值,为了让整定函数失效,必须经驱动重新设置在准备状态,这时需要输入一个停止的设置和命令:

2 磁通量控制器的整定
磁通量电路控制器的整定函数仅仅在驱动处于准备状态时可被激活。它的激活设定为:

如果想在驱动未在准备状态时进行整定,控制将自动设置为:

磁通量电路控制器的整定函数可以防止外部回路(速度)失效并且设定Isq的转矩电路控制器的设定值为0。并且,它可以提供一个方波信号作为Isd电路控制器的初始值。方波具有两种电平,主要表现为高电平和低电平,这两种电平可以通过LocalTestCtrls菜单中的参数FlxM1和FlxM2的平均值来设定。这些参数的默认值为:

方波的周期可以通过同菜单中的TnPer参数进行修改,默认值为8s。
为能够整定,模拟的输出信号1Sig,2Sig和3Sig能够自动配置以成为对整定举例有用的控制器信号。为了能够完成控制器的整定,驱动需一直运行并且可以调整控制器的比例和积分增益(参数FlxKp和Flx-Ki属于菜单FOC Regulators)。完成控制器整定的程序如下:
——设积分增益为0;
——增加比例增益使得反馈信号达到要求的稳定性(超调量可接受);
——增加积分增益直到逆变器达到要求的稳定性。积分增益可以减少稳态误差,它必须取一个在超调量(尽量的小)和稳定时间(尽量的短)折衷的值。
磁通量控制器使得饱和度的观测值更加灵敏。为作出正确的控制整定,有必要确定控制器的输出(Isd_Ref)在传输过程中未饱和。也很有必要检查输入参考信号(FlxM1和FlxM2)的特征值未使控制器输出饱和。图4是初始值,反馈和磁通量控制器输出的整定例子,图4d显示的是一个好的整定。

图4 反馈和磁通量控制器输出整定
一旦确定看控制器参数的合适的值,为了让整定函数失效,必须经驱动重新设置在准备状态,这时需要输入一个停止的设置和命令:

3 转速控制器的整定
转速控制器的整定函数仅仅在驱动在准备状态时可被激活。它的激活设定为:

如果想在驱动未在准备状态时进行整定,控制将自动设置为:

在设定转速控制器的整定之前,必须等到转速马达已经达到设定的速度参考值,转速控制器的整定函数产生一个速度设定值的方波信号的下斜面。
方波具有两种电平,一种电平等于设定的速度参考值;另一种则为涉及在LocalTestCtrls菜单中的参数SpStp的方波的振幅。
方波的周期可以通过同菜单中的TnPer参数进行修改,默认值为8s。
为能够整定,模拟的输出信号1Sig,2Sig和3Sig能够自动配置以成为对整定举例有用的控制器信号。为了能够完成控制器的整定,驱动需一直运行达到设定的转速参考值并且可以调整控制器的比例和积分增益(参数Sp1Kp、Sp1Ki和Sp1Kd属于菜单FOC Regulators)。
完成控制器整定的程序如下:
——设积分增益为0;
——增加比例增益使得反馈信号达到要求的稳定性(超调量可接受);
——增加积分增益直到逆变器达到要求的稳定性。积分增益可以减少稳态误差,它必须取一个在超调量(尽量的小)和稳定时间(尽量的短)折衷的值。
图5是初始值,反馈和转速控制器输出的整定例子。图5d显示的是好的整定。
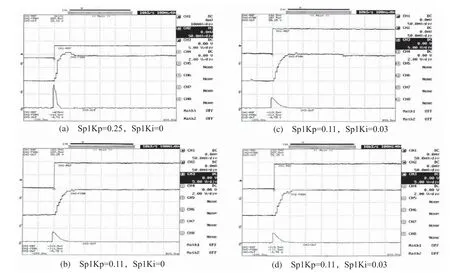
图5 转速控制器整定
4 Rr的整定
参数Rr(感应电动机的5个参数模型中的转子阻抗)在矢量(或通量)控制(F.O.C:场导向控制)中是非常重要的。事实上,它的错误设置会导致一个比较差的性能(转矩的线性,动态参数和额定操作)。
如果对马达的参数不是很明确,那么必须检查并通过以下两种方法的平均值最终确定Rr的阻抗值。
方法a—在转矩允许的范围内应用加速度的方法对Rr进行整定
目前的整定方法仅允许应用在马达未接任何机械负载的时候。
为确保转子阻抗的整定,将参数设为:

这个设置可以在受保护的任何控制系统状态下完成。对于转子阻抗的整定能够使Rr参数立即(在线的)改变。
设定两个模拟输出作为定子的速度和马达的电压信号。确保马达的额定转速和最大转速(RPMNm和RPMMx参数属于Motor Parm菜单)为不同值,用于显示定子转速的模拟输出是固定的,它的增益值的平均值为:

定子阻抗的值可以通过在转矩允许的条件下通过一个非常短的斜坡以加速的形式进行核对。
为了实现这个目的,必须将斜坡时间设置为参数Rmp1U(General Parms菜单)的平均值为2s并且将Tq1UI的转矩限制(Foc Regulators菜单)设置为0.3~0.4p.u.范围。
一旦设定转速参数在马达的额定转速的70%~80%之间,加速结果会是在一个满负载的条件下。在示波屏上显示转子的转速和马达电压信号,如果Rr已经是正确值,那么这两个信号的趋势事实上是相同的。
如果设定的Rr的值是错误的,那么定子转速和马达电压信号将显示为不同的趋势。
特别的,如果设定的Rr值低,我们会看到一个如图6b所示的趋势图,图中假设马达电压信号高于马达速度信号。这种情况下,要将Rr的值增加,直到得到一个如图6a所示的趋势图。另外,如果设定的Rr值高于我们需要的值,效果如图6c所示。假设马达电压信号低于马达速度信号。在这种情况下,阻抗值需降低直到得到如图6a所示的趋势图。

图6 不同Rr设定值的趋势图
一旦获得了正确的整定,那么获得正确的Rr值,必须在Eeprom中保存。
方法b—核定一个额定的操作值对Rr整定
这种方法是基于对负载操作值的核定并且在任何时候都不必执行在转矩范围内对马达加速。马达带负载运行,为对转子阻抗进行整定,作以下设定:

设定两个模拟输出作为定子的速度和马达的电压信号。确保马达的额定转速和最大转速(RPMNm和RPMMx参数属于Motor Parm菜单)为不同值,用于显示定子转速的模拟输出是固定的,它的增益值的平均值为:

在示波屏上显示转子的转速和马达电压信号,如果Rr已经是正确值,那么这两个信号的趋势事实上是相同的,如图7a所示。如果设定的Rr的值是错误的,那么定子转速和马达电压信号将显示为不同的趋势。特别的,如果设定的Rr值低,我们会看到一个如图7b所示的趋势图,图中假设马达电压信号高于马达速度信号。这种情况下,要将Rr的值增加,直到得到一个如图7a所示的趋势图。另外,如果设定的Rr值高于我们需要的值,效果如图7c所示。假设马达电压信号低于马达速度信号。在这种情况下,阻抗值需降低直到得到如图7a所示的趋势图。
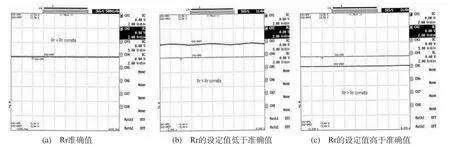
图7 不同Rr设定值的示波图
