基于PROBA/CHRIS影像的归一化阴影植被指数NSVI构建与应用效果
2021-07-08胡新宇许章华陈文慧陈秋霞王琳刘辉刘智才
胡新宇,许章华,3,4,5,6,陈文慧,陈秋霞,王琳,3,4,刘辉,3,4,刘智才,3,4
(1.福州大学环境与资源学院,福州 350108;2.福州大学地理与生态环境研究中心,福州 350108;3.空间数据挖掘与信息共享教育部重点实验室,福州 350108;4.福建省水土流失遥感监测评估与灾害防治重点实验室,福州 350108;5.3S技术与资源优化利用福建省高校重点实验室,福州 350002;6.福州大学信息与通信工程博士后科研流动站,福州 350108;7.福建农林大学公共管理学院,福州 350002)
0 引言
受太阳入射角、地物自身高度及地形起伏等要素的综合影响,遥感影像上普遍存在“明亮”及“阴影”两个层次。阴影区使目标地物表现在遥感影像上的信息量减少,极大地干扰了地物识别、信息提取[1-3]及定量算法构建[4-5]等工作的开展。随着国产卫星技术的持续发展、遥感影像应用领域的不断扩展,如何有效地检测并消除阴影的影响已成为亟待解决的问题。
遥感影像阴影检测通常分为基于模型和基于阴影性质两类。基于模型的阴影检测方法需要有关于场景、目标和光照的先验知识,该方法涉及的大量参数不易获取,应用具有较大的局限性。基于阴影性质的检测方法则是利用了阴影区域的光谱和几何特性来检测阴影。国内外对阴影检测的研究已颇具成果,早期利用影像上阴影区域的亮度比非阴影区域亮度值低的性质,采用阈值法进行阴影检测[6-7]。Etemadnia等[8]基于RGB图像提出了基于同态滤波的检测方法;Tsai[9]提出了一种基于属性的自动方法,检测和补偿在复杂城市彩色航空影像中保留形状信息的阴影区域;Arévalo等[10]提出了一种在QuickBird特定波段上引用区域生长过程的方法对阴影像素的饱和度和强度值以及其边缘梯度施加了限制;Martel-Brisson等[11]利用高斯混合模型来构建描述前景图像表面上移动的阴影统计模型;夏怀英等[12]提出基于混合统计模型的Google高分辨率遥感影像阴影检测;王玥等[13]以该模型为基础,基于彩色航空影像与QuickBird影像导出用于影像阴影检测的基本算法;许章华等[14-15]从山地丘陵阴影区植被与其他地物之间光谱的差别入手,进一步增大了阴影区植被与明亮区植被、水体区之间的差异,建立了阴影植被指数(shaded vegetation index,SVI),并进一步构建了归一化阴影植被指数(normalized shaded vegetation index,NSVI),通过验证在Landsat TM/ETM+,ALOS AVNIR-2,CBERS-02B-CCD及HJ-1-CCD等几种多光谱遥感影像数据上的检测效果,证明了上述指数的可行性。
不难发现,当前关于阴影检测与去除的研究,多基于多光谱影像数据。高光谱遥感由于光谱通道的连续性[16-17]在阴影区植被的分类识别和信息提取中具有独特的优势[18-19],但关于阴影检测的研究较为不足。如Andrews等[20]阐述了开展精确阴影检测技术的必要性,同时提出使用强制零端元和圆锥形次单纯投影来消除高光谱影像中阴影的影响;Qiao等[21]基于Jeffries-Matusita(J-M)距离验证类别之间的光谱可分离性,利用最大似然分类及支持向量机将阴影像素分类为不同的土地覆盖类型,从而实现阴影地物的识别。
尽管上述基于多光谱与高光谱遥感影像阴影检测方法在特定区域内取得了较好的检测效果,然而还存在一些不足,如:①选取的影像范围较小,影像范围内地物种类较为单一;②计算方法复杂,过程不稳定,人工经验干预较为突出;③阴影检测结果中常混入其他地物,如细小水体和深蓝色地物等。高光谱遥感影像通道数更多,光谱组成更为复杂,且低频信息多,故阴影区光谱解混与地物识别也更为困难,从而在一定程度上限制了该数据的精准应用与快速发展。为此,本文以高光谱影像PROBA/CHRIS为试验数据,尝试在此影像中构建和应用NSVI,旨在为高光谱遥感阴影检测提供技术参考,同时为其阴影去除及其阴影区信息修复与提取等工作提供支持。
1 归一化阴影植被指数NSVI构建原理
遥感影像中的明亮区植被、阴影区植被、水体区,其光谱具有差异性,但又有一定程度的“重叠”;若对三者的原始光谱差异予以进一步增强,可提高其可判读性。许章华等[14]的试验表明,明亮区植被、阴影区植被、水体区在近红外波段的光谱值差异普遍最大,表现为水体区<阴影区植被<明亮区植被,归一化差值植被指数(normalized difference vegetation index,NDVI)也基本呈此特征,但水体与阴影区植被存在较大的混淆概率,这也是影响水体提取精度的其中一个主要原因[22]。由于植被NDVI与各地物近红外光谱值在0以上,且NDVI在明亮区植被与阴影区植被范围内差距较明显,而水体区NDVI值在0以下,故将NDVI与近红外波段相乘,既可保证明亮区植被、阴影区植被、水体区在近红外波段的绝对差异,又能对NDVI进行放大,消除可能存在的混淆现象。在此基础上构建SVI模型,其表达式为:
(1)
式中:NIR为近红外波段反射率;R为红光波段反射率。
为保持与NDVI尺度上的一致性,对SVI进行归一化处理得到NSVI,为:
(2)
式中SVImax和SVImin分别为累积像元频率在[5%,95%]区间内SVI的最大值和最小值。
参考上述思路,本文以多角度高光谱影像PROBA/CHRIS为试验数据,分析明亮区植被、阴影区植被、水体区3种地物的典型光谱特征,尝试构建基于该影像的NSVI,并检验其应用效果。
2 数据获取与处理
2.1 PROBA/CHRIS数据介绍
PROBA是欧洲太空局于2001年10月22日发射的新一代太阳同步轨道微卫星,轨道高度615 km,倾角97.89°。星上搭载了3种传感器,其中的紧凑式高分辨率成像分光计CHRIS由一个望远镜和一个联结770列576行CCD数列检测系统成像分光计组成,以推扫方式获取可见光-近红外光谱数据;成像光谱范围0.40~1.05 μm,光谱分辨率1.25~11.00 nm[23]。
2.2 试验影像及其预处理
该研究采用的试验数据为2016年12月22日覆盖福建省长汀县河田镇的PROBA/CHRIS影像,数据来自于欧空局官方网站(https://earth.esa.int/web/guest/home)。CHRIS传感器有5种成像模式,其中模式4主要用于对地表叶绿素的检测,可以更好地反映地表植物的生长状况。该模式共有-55°,-36°,0°,+36°,+55°等5幅影像,空间分辨率均为17 m,中心波长为489~792 nm[24]。5个角度的影像覆盖的范围略有不同。CHRIS影像预处理主要包括噪声去除、大气校正、几何纠正等。经预处理之后的B14,B6,B2(B14,B6,B2分别为该影像的第14,6,2波段,下同)假彩色合成的5角度影像如图1所示。

(a)0° (b)36° (c)-36° (d)55° (e)-55°
3 试验结果与分析
3.1 特征波段选取
较之于多光谱数据,高光谱影像的波段数较多,分析并筛选特征波段有利于目标地物的高效识别。连续投影算法(successive projection algorithm,SPA)是一种前向循环的特征变量选择方法,利用向量的投影分析,选取含有最低冗余度和最小共线性的有效波长,对光谱波长进行优选,减少建模所需变量个数,改善建模条件[25],故本文选用此方法选取特征波段。该算法步骤如下[26]:①在光谱矩阵中任选一条光谱列向量作为起始向量;②分别计算剩余列向量在起始向量的正交平面上的投影向量;③挑选出最大投影作为下一次投影的起始向量,直到挑选变量个数达到最大所需个数;④将提取的所有波长组合进行多元线性回归,最小的均方根误差(root-mean-square error,RMSE)所对应的组合即为最优的波长组合。
将波段依据中心波长进行归类(表1),利用SPA对影像光谱数据进行明亮区植被、阴影区植被、水体区敏感特征筛选,于RMSE最小(0.235 9)时选出B3,B9,B15作为敏感特征波段。由于算法本身易于波长范围边缘处选取波长[27],为避免出现误差,故舍弃B3,分别将B9和B15作为红光和近红外的特征波段。
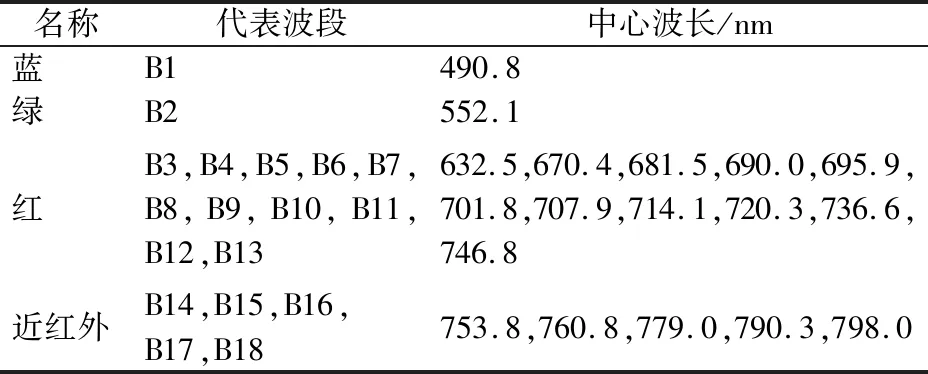
表1 依据波谱范围归类波段Tab.1 Band classification by wavelength
3.2 典型地物光谱特征分析
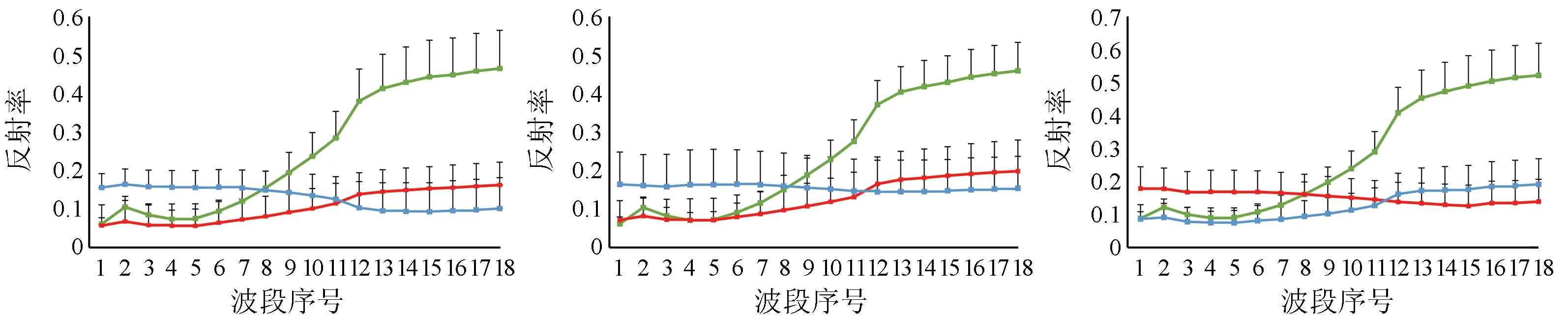
NDVI是应用最为普遍的植被指数之一,亦有不少学者将其作为水体、植被等信息提取的重要指标[28],故本文提取各角度影像的NDVI,并分析比较几种典型地物的NDVI特征。水体是山地丘陵区主要地物之一,因其易与阴影区植被混淆,将其列为一类加以讨论;而建筑用地则予以忽略。取5个不同角度影像之间的重合区域,在此区域中选取明亮区植被、阴影区植被、水体区各50个样点,分别统计其影像各波段及NDVI的均值(本研究NDVI的取值区间为[-1,1])并予以比较(图2和图3)。试验数据中明亮区、阴影区地物均以绿色植被为主。从图2可以看出,明亮区植被的光谱曲线特征与绿色植被的理论光谱曲线相符;而位于阴影区的植被,其光谱曲线特征则有所差异,主要有三:①明亮区植被各波段光谱值普遍较阴影区植被高;②阴影区植被光谱曲线与明亮区植被相比,其光谱曲线发生一定程度的改变,主要表现为蓝光波段光谱反射率高于绿光波段(图2(a)和(e)),或绿光波段反射小峰特征不明显(图3(b)和(d));③近红外波段光谱反射率受削弱程度较大,光谱曲线普遍呈上升趋势,但趋势较为平缓。
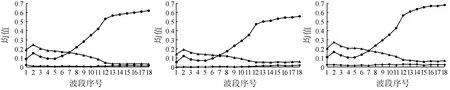
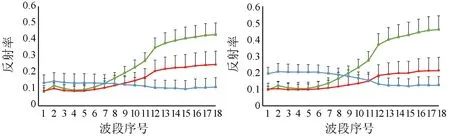
(a)0° (b)36° (c)-36°
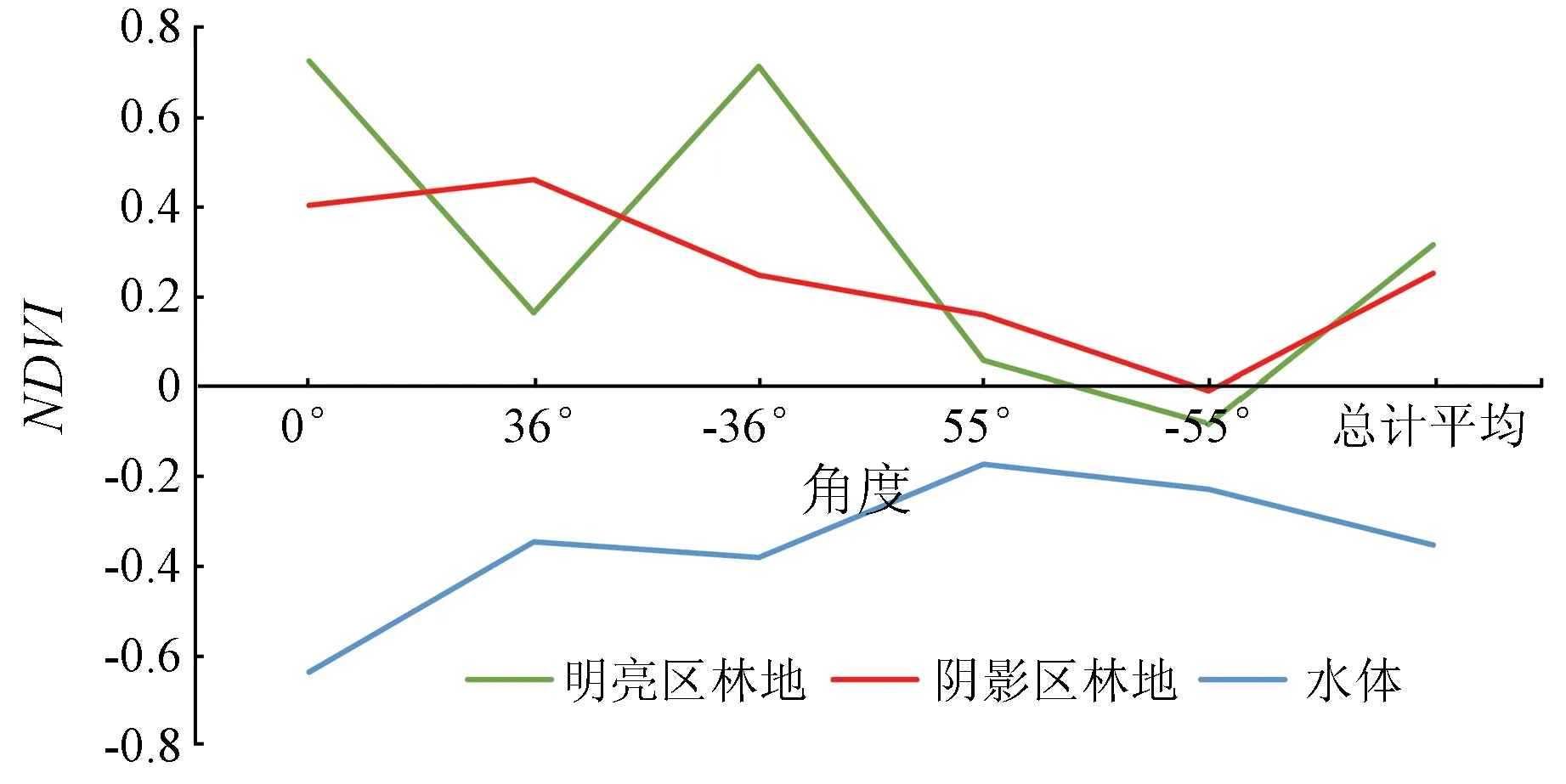
图3 不同角度影像NDVI取值Fig.3 NDVI from different angle images
水体的光谱响应特征通常受水文状况的影响,但其光谱曲线仍存在两个基本特征:①水体区的光谱曲线总体上呈现下降趋势,但在绿光波段有一个小的反射峰,之后持续下降,在近红外波段,水体区的光谱值较阴影区植被高;②在红光波段末段前,水体区光谱值与明亮区植被、阴影区植被相比均较大,水体区光谱曲线在红光波段中段(B7—B9)与明亮区植被相交,之后水体的光谱值逐步下降,至近红外波段末段处,其光谱值已与阴影区植被较为接近。根据图3可知,植被为正值,而水体为负值;处于阴影区的植被,由于红光波段与近红外波段光谱信息均受削弱较多,故阴影区植被NDVI值与明亮区植被较为接近。水体的NDVI基本为负值;当水体遭受污染时,水体中的含沙量增加,导致水体反射率增高,水体与其他地物的可分性降低。
上述分析表明,PROBA/CHRIS高光谱数据中明亮区植被、阴影区植被、水体区的光谱特征与前述多光谱数据类似,故基于该影像构建NSVI指数具有理论可行性。然而,其对该影像阴影的检测效果如何还有待验证,且高光谱数据的特征波段选择要比多光谱数据复杂。
2018年“双十一”天猫热销店铺排行TOP30榜单里,茅台官方旗舰店继续雄踞榜首,而张裕官方旗舰店则在葡萄酒店铺排名中稳居第一位,实现2分钟突破100万元,1小时18分钟突破1000万元。截至“双十一”当天22时30分,张裕电商销售额达到2890万元,逼近3000万元大关。。
3.3 NSVI构建
试验数据中含有部分建筑信息,本阶段研究暂不考虑之,故先将其掩模。本研究基于IBI指数[29]提取该影像的建筑信息,但CHRIS影像的光谱范围为可见光至近红外,缺失中红外波长,借助同时相Landsat8 OLI影像的近红外波段与光谱匹配法对中红外波段信息予以模拟。光谱匹配法是一种常见的根据像元之间光谱响应曲线本身的相似程度,从而探索其拟合关系的一种聚类分析,其思路为将已知的波段信息作为自变量,所求波段信息作为因变量,构建二者之间的回归方程以实现对目标波段信息的求取[30]。
基于掩模后的PROBA/CHRIS影像及3.1中筛选的特征波长,计算影像NDVI(图4);再将计算结果依次代入式(1)和式(2),由此构建出CHRIS影像的归一化阴影植被指数NSVI(式(3)),据此提取该影像的NSVI(图5)。为分析比较NSVI、NDVI的数据分布特征,分别统计绘制各角度影像两个指数的直方图,用以描述像元分布特征。图4和图5显示,NDVI直方图普遍呈现“左偏”分布,即当地面植被越来越茂密时,NDVI出现“易饱和”现象,无法实现同步增长[31],这也是制约该指数提取效果的重要因素,反观NSVI的期望值则相对集中均匀地分布于参考线两侧,故NSVI的正态性更为显著。
(3)

(a)0°NDVI (b)36°NDVI (c)-36°NDVI (d)55°NDVI (e)-55°NDVI

(a)0°NSVI (b)36°NSVI (c)-36°NSVI (d)55°NSVI (e)-55°NSVI
为了进一步对该判定进行定量验证,统计两个指数的峰度与偏度。表2显示,NSVI的峰度与偏度的绝对值均小于NDVI,其值均介于[-1,1],由此进一步说明本文所构建的NSVI可拉大地物间的相对差异,使植被指数更接近正态分布,NSVI能够更为真实地反映地表植被的实际情况。

表2 各角度影像NDVI与NSVI直方图峰度与偏度对比Tab.2 Comparison of kurtosis and skewness of NDVI and NSVI gray histograms of various angle images
3.4 效果评价
3.4.1 分类精度评价
基于阈值法的分类,其精度往往受操作者阈值选取的主观性影响,不同阈值下的地物分类精度不同。为了更为科学合理地确定各典型地物的NSVI阈值,获取其最佳分类效果,本文采用步长法分别计算不同阈值下的分类精度,据此确定阈值区间。随机生成300个点对不同阈值下的分类结果予以精度评估(图6(a)),图6(b)—(d)显示,总分类精度—阈值、Kappa系数—阈值间均表现为随着阈值的增大,精度评估指标呈现先上升后下降的开口向下的“抛物线”特征,据此即可确定分类效果最佳的阈值。基于所确定的明亮区植被、阴影区植被及水体区分类最佳阈值,提取5个角度影像的明亮区植被、阴影区植被及水体区信息(图7)。表3显示,0°影像的提取精度最佳,±36°次之,最后为±55°,但其分类精度均在94%以上,Kappa系数普遍在0.89以上(表4),由此表明所构建的NSVI可有效区分明亮区植被、阴影区植被与水体区。随着飞行天顶角的扩大,影像发生一定程度的畸变,质量较差且整体较为模糊,也会对阴影的检测产生一定的影响。

(a)验证点分布 (b)明亮区植被阈值选取 (c)阴影区植被阈值选取 (d)水体区阈值选取

(a)0° (b)36° (c)-36° (d)55° (e)-55°

表3 明亮区植被、阴影区植被及水体区分类最佳阈值确定Tab.3 Best threshold determining of bright vegetation area,shaded vegetation area and water area
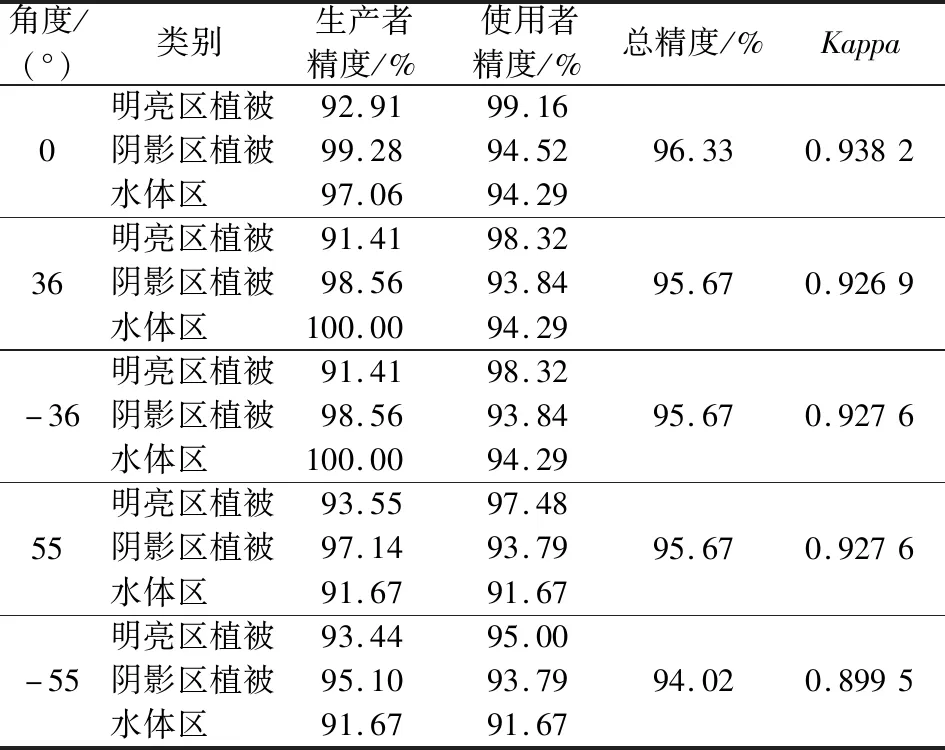
表4 5个角度影像地物分类精度评估Tab.4 Accuracy assessment of different ground objects extracted from five angles
3.4.2 光谱差异增强效果评价
基于3.4.1的分类结果,利用掩模技术获取3种地物各角度子影像(图8)。图8显示,明亮区植被、阴影区植被、水体区的光谱均值有差异,这也是上述地物可分及阴影识别的基础。但是,如果考虑标准差指标则会发现,地物间的光谱重叠现象较为明显,“同物异谱”与“异物同谱”现象仍然较广泛存在。由此可见,NSVI增强了典型地物间的光谱差异,将CHRIS影像中原始光谱混淆的像元进行了有效解译,提高了光谱混淆像元的可分性。由此进一步证明了本研究基于CHRIS影像所构建的NSVI具备该影像的阴影检测能力。
(a)0° (b)36° (c)-36°
(d)55° (e)-55°
4 讨论
为了验证NSVI对阴影检测的有效性,本研究选取常见的阴影指数:归一化阴影指数(normalized different umbra index,NDUI)和阴影指数(shadow index,SI)对上述研究区进行阴影检测,公式如下:
NDUI=(S-I)/(S+I),
(4)
(5)
(6)
对计算结果采用阈值法,选取合适的阈值。为了评价三种指数对阴影区域的检测效果,将分类结果二值化处理为阴影区与非阴影区(图9),采用上述验证点对实验结果进行统计,结果如图10所示。

(a)NDUI0° (b)NDUI36° (c)NDUI-36° (d)NDUI55° (e)NDUI-55°
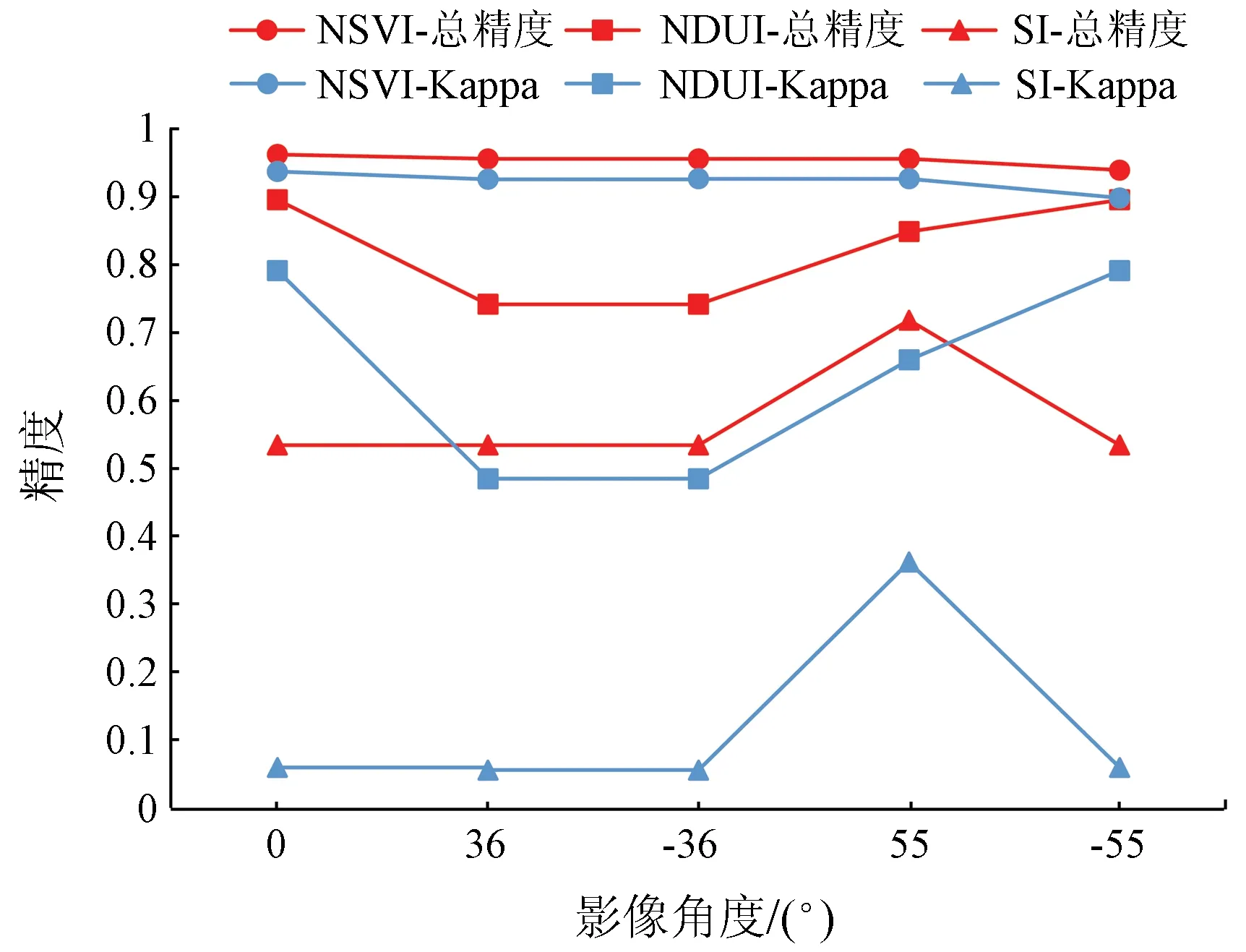
图10 不同方法阴影检测比较Fig.10 Comparison of different shadow detection methods
不难发现,较本文所实验的NSVI指数而言,SI和NDUI的阴影检测结果精度均较低,其检测精度由高到低分别为:NSVI指数>NDUI指数>SI指数,主要原因出现在以下3个方面:①SI和NDUI指数均运用到了HIS色彩变幻的方法,常见的色彩变幻方法主要是运用遥感影像的可见光波段进行运算,而本文所涉及的高光谱遥感影像的波长范围却在蓝光波段的波长范围之外,故本文使用标准假彩色,即将近红外波段置于红光通道,红光波段置于绿光通道,绿光波段置于蓝光通道进行计算,故结果可能较使用原始可见光波段而言略有差异[32];②无论如何选取阈值,SI和NDUI都无法避免提取出水体的状况,是因为遥感影像中水体区的饱和度和强度与阴影区差异不明显,故仅使用这二者进行计算无法有效甄别水体区与阴影区,从而导致结果精度下降(表5中水体区域);③阴影区植被和明亮区植被的差异主要体现于近红外范围内,上述两种方法虽然在计算时使用了近红外波段,但是这种差异没有被扩大,导致部分阴影区植被由于亮度不够深出现与明亮区植被混淆的情况(表5中多阴影区域)。

表5 不同区域阴影检测结果放大Tab.5 Shadow detection results in different areas are enlarged
NSVI基于SVI归一化实现,而SVI由NDVI与NIR相乘而得。目前,已有学者将其应用于对细小水体的提取[33],Wang等[34]还用其实现光合作用与总初级生产力的估算。由此可见,NSVI有较为广泛的应用潜力,值得我们进一步研究发现。
随着高光谱遥感技术在森林监测方面的快速发展和广泛应用,使森林类型精准识别、森林冠层生化组分遥感反演和生物多样性监测成为可能。然而,遥感影像上的阴影区域一直是制约高光谱遥感对地物精准识别的重要因素。一方面,阴影造成遥感影像信息失真,对图像配准、图像分割特征提取和目标变化检测等影像处理造成严重影响。另一方面,阴影是遥感影像的特征之一,阴影可以用来提取地物的三维信息,如山体、建筑物的高度等。因此,阴影检测是阴影去除、补偿及利用的重要前提,提高阴影检测精度具有重要意义。
5 结论
本文针对遥感影像上普遍存在的阴影问题,通过扩大阴影区植被与明亮区植被、水体区之间的差异,构建了基于PROBA/CHRIS影像的归一化阴影植被指数NSVI,并检验该指数的有效性。
1)利用SPA对影像光谱数据进行明亮区植被、阴影区植被、水体区敏感特征筛选,于RMSE最小时选出B3,B9,B15作为敏感特征波段。综合考虑RMSE、各波段和光谱边缘的算法特征后,将B9和B15作为构建CHRIS影像NSVI红光和近红外的特征波段。
2)基于NSVI阈值法对CHRIS各角度影像予以分类,结果表明,各角度影像明亮区植被、阴影区植被、水体区3种地物的分类精度均在94%以上,总Kappa均大于0.89,其中0°影像的分类效果最佳,分类精度为96.33%,总Kappa为0.938 2。
3)为进一步分析NSVI的有效性,掩模出各典型地物的子影像,统计均值和标准差指标并予以比较分析。结果表明,明亮区植被、阴影区植被、水体区的光谱均值有差异,但如果考虑标准差指标则会发现,地物间的光谱重叠现象较为明显。NSVI增强了典型地物间的光谱差异,将CHRIS影像中原始光谱混淆的像元进行了有效解译,提高了光谱混淆像元的可分性。
多角度遥感作为一种新的观测方式,是在传统光学单角度观测的模式下,增加了角度维的信息,正因为观测角度的差异,才有可能观测到森林场景中的树干部分以及不同位置的阴影量,这为反演森林的树高和生物量的空间结构信息提供了可能。PROBA/CHRIS作为目前世界上唯一可以同时获取高光谱和多角度数据的星载传感器,它不但有5种工作模式,而且空间分辨率较高,光谱范围宽,在生物物理、生物化学方面可作为重要的信息来源。此外,该遥感数据可一次性获取同一地点5个不同角度的成像,在估测植被或森林冠层结构、叶面积指数反演等研究中十分有用。为此,深入解析基于该影像源的阴影检测方法具有一定的研究意义。
综上所述,本文基于PROBA/CHRIS多角度高光谱影像所构建的归一化阴影植被指数NSVI,具备较强的阴影检测能力,能够应用于该影像的阴影检测,并可为该影像的阴影去除及阴影信息修复等工作提供重要支持。
