无动力助行器中储能装置的设计与分析
2021-07-08孙雨桐陈力宁王飞涵
孙雨桐 陈力宁 王飞涵
吉林大学 生物与农业工程学院 吉林 长春 130000
引言
人的体力是有限的,不同人身体状况的不同也会对步行的距离和效果有影响。如何减少因走路所消耗的能量,而延长行进的时间与里程成为现如今的研究热点。
国内外多所高校和研究所对于助行进行了研制开发。如新加坡南洋理工大学的下肢外骨骼机器人、日本筑波大学的 HAL系列下肢外骨骼机器人、清华大学张济川等人在研究的电动外骨骼机器人助行器、燕山大学研制出我国第一台六自由度并联机器人样机。
当前国内外的研究热点是以电机、气动人工肌肉为驱动,基于神经网络等智能算法控制的外骨骼机器人,主要应用于军事领域以及神经重塑性康复医疗领域[1]。这些外骨骼助力器均有一个共同的特点,就是设有驱动装置。造成外形庞大,结构复杂,造价昂贵等不足,另一方面,能源使用等问题也是重要阻碍。
无动力助行机器人即不借助能源设备及其他非自然的外力进行驱动,利用使用者自身来操作的助力机器人。无动力助行机器人与现有的驱动机器人相比,大大降低了体积和质量,而且不具有能源的消耗,解决了动力型外骨骼助力机器人长期以来存在的不足,给予了人行走时舒适的体验感,符合当今社会推崇的能源可持续发展的理念[2]。
本文主要介绍一种利用接触型平面涡卷弹簧的储能装置设计,以及对其性能的分析研究。
1 助行器储能装置设计
1.1 助行器储能结构
考虑到健康人的行走姿态及所能接受的负重,助行机器人需要提供一个舒适柔软、轻便简洁的助行器,以避免人们在使用过程中由于行走困难或负载过重而使助行器未达到辅助作用。此外助行机器人还应具有一定的灵活性使人们在使用过程中能够方便穿戴。基于上述考虑为使助行机器人能够同时具有柔软性与灵活性本文设计了如图1所示的机械结构。
由图1中可见,助行器的结构大致分为上、中、下3层。助行器上层和中层采用柔性连接件3相连接,可适应不同高度进行调节,以满足不同人需求。上层腰带1可通过魔术贴,进行不同位置的固定以满足不同腰部尺寸大小的需求。助行器中层为大腿腿缚5,并通过柔性连接件与腰部储能装置2连接。助行器下层为膝盖储能装置4、小腿连接件6和小腿腿缚7。
目前无动力助行器中常采用流体弹簧、涡卷弹簧、形状记忆合金、弹性软体材料等。弹簧在无动力助行机器人中可具有以下作用:①控制机械运动;②储存及释放能量;③吸收震动,减轻冲击[3]。
本助行器利用涡卷弹簧设计储能装置如图2所示,此储能装置安装在助行器腰部及大腿之间,包括平面涡卷弹簧、卡簧、涡卷弹簧约束环、助力组件外壳,将平面涡卷弹簧利用涡卷弹簧约束环约束在助力组件外壳内。
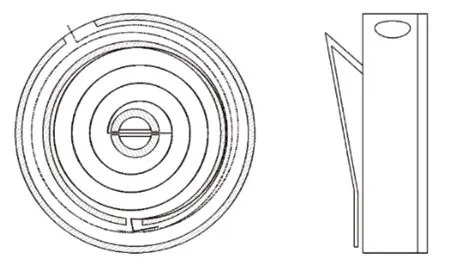
图2 储能装置结构
1.2 助行器储能原理
根据人体行走时,髋关节转角(大腿与躯干的转角)在正常步行时的变化范围见表1,以及涡卷弹簧储能特性,利用平面涡卷弹簧固定在躯干腰部,平面涡卷弹簧的末端装有两根柔性绳,柔性绳的另一端连接在大腿腿缚上。当行走过程中腿部伸直时,平面涡卷弹簧被拉伸使其存储势能,腿抬起时,弹簧回缩并释放能量,辅助大腿抬起,随后腿在重力作用下放下时,涡卷弹簧再次被拉伸、为下一次腿部抬起储能[4]。

表1 髋关节行走时的转动范围[5]
2 储能装置性能分析
平面涡卷弹簧设计质量对整个储能系统的性能至关重要,对其进行应力分析、变形分析及模态分析,判断弹簧是否失效。
2.1 涡卷弹簧应力分析
为了对涡簧进行相应的应力分析以及模态分析,需要建立相应的模型如图3。利用Creo软件利用方程建立曲线,扫描形成涡卷弹簧。根据弹簧工作条件,初步确定弹簧外形尺寸为:涡卷弹簧最大直径为80mm,截面圆直径为4mm,缠绕五圈。
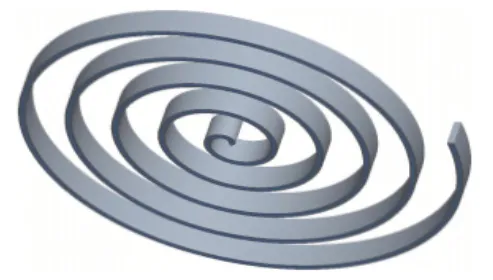
图3 涡卷弹簧模型
导入CATIA软件中。首先定义所用弹簧的弹性属性,经对比后材料采用为65Mn钢,材料属性见表2。其次进行有限元分析,进行网格划分,利用自动划分网格命令,初始网格数值设定为2mm,然后使用高级网格命令进行细致划分,生成较高质量的网格系统。最后定义边界类型,使用Clamp命令及Moment命令分别对涡卷弹簧进行应力状态分析。
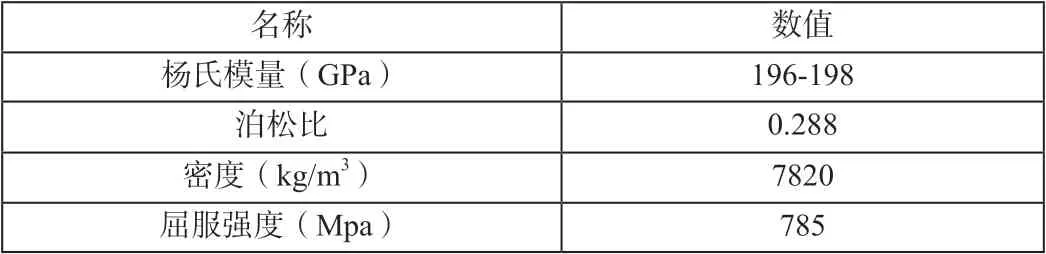
表2 65Mn材料属性
使用Moment命令,在涡卷弹簧上下表面施加Z方向的扭矩,点击Computer进行运算,得到压力分布图(图4-6),分别分析在弹簧心部固定、尾部固定和同时固定时的应力状态。
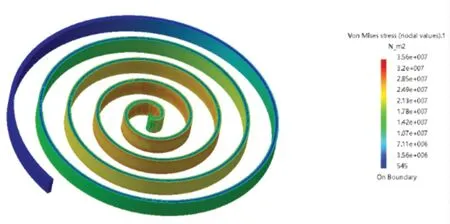
图4 心部固定应力状态图

图5 尾部固定应力状态图

图6 同时固定应力状态图
图4-6中,显示了涡卷弹簧在人体正常行走时大腿与躯干间的平均工作扭矩1000N·mm作用下发生弯曲变形的应力图。从三次有限元分析的应力云图可看出,在施加相同扭矩的情况下,不同固定方式的应力分布和应变打小分布并不相同。尾部固定时,涡卷弹簧应力在内圈和外圈的分布不均匀,且外圈受力较大;心部和尾部同时固定时,内圈和外圈同时受较大的应力。当心部固定时,涡卷弹簧受扭矩作用,应力均匀分布在内外圈。
涡卷弹簧储能装置在助行器中通过尾端装有的柔性绳与大腿腿缚连接,柔当行走过程中腿部伸直时,平面涡卷弹簧尾端被拉伸产生扭矩,使其存储势能。通过分析可得,在涡卷弹簧心部固定时,人体行走时涡卷弹簧所受最大应力为35.6MPa,而材料所能承受的抗拉强度为825~925MPa,所以弹簧不会失效。
3 动力学仿真分析
利用CATIA对平面涡簧弹簧进行了有限元应力分析,为了进一步了解涡簧的动力学性能,将涡簧形成柔性体进行分析。借助动力学仿真软件 ADAMS建立简易模型如图7,运用软件中柔性体分析模块,对涡簧进行动力学仿真。
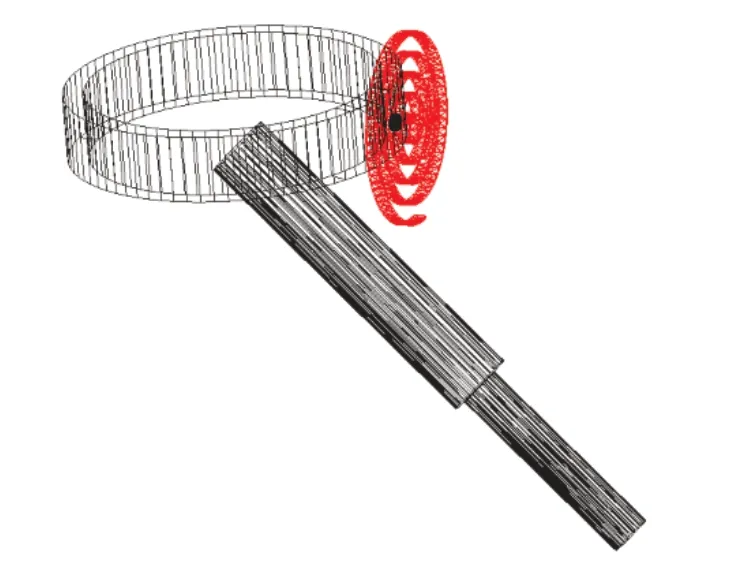
图7 涡卷弹簧与腿部简易模型
3.1 ADAMS中涡簧柔性体模型建立
由于涡簧形状比较复杂,因此在Creo建立涡卷弹簧实体模型如图3所示,把上述实体模型导入ADAMS中,将涡卷弹簧中心与地面建立固定约束,建立一个连杆与涡卷弹簧尾端固连,在连杆与涡簧心部间施加转动约束。利用其柔性体模块ADAMS/AutoFlex,生成柔性体,如图8所示。

图8 涡卷弹簧柔性体模型
3.2 涡簧动力学分析
生成柔性体后,对其施加约束,连杆Marker 点处施加转动约束,将连杆处施加恒定角速度,其大小为 rad/s。在中心Marker点处施加固定约束,如图9所示。
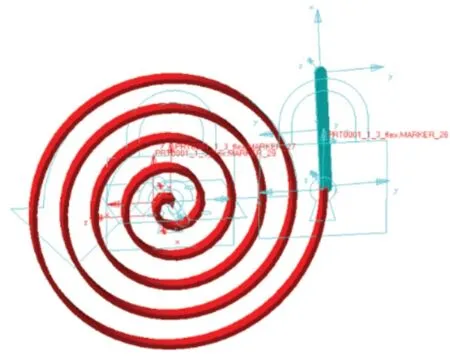
图9 涡卷弹簧柔性体约束模型
在ADAMS中,将恒定角速度添加到施加好约束的涡簧并仿真后,其仿真过程展现出每一步涡簧的变化以及应力形态,涡簧在受到扭矩后各圈依次发生变形,所受到的应力也随着涡簧卷紧圈数的不同变化着,图10为涡簧在卷紧过程中的一个变形图。

图10 涡卷弹簧变形图
将涡卷弹簧的变形图转换到 ADAMS 后处理模块中,得到该涡簧在受到恒定角速度后旋转角随时间变化的曲线,如图11-1。由图可知:随着仿真时间的增加,旋转角度逐渐变大,涡簧慢慢旋紧,并且涡卷弹簧的转角与时间成正线性相关关系。图11-2为涡簧扭矩随时间变化关系,随着时间的增加(转角增加),涡卷弹簧所受扭矩随着时间而不断增大,且增加的幅度越来越大,全部卷紧时所受到的扭矩为 115N·m,比涡簧所能承受的最大扭矩314.365N·m 小。
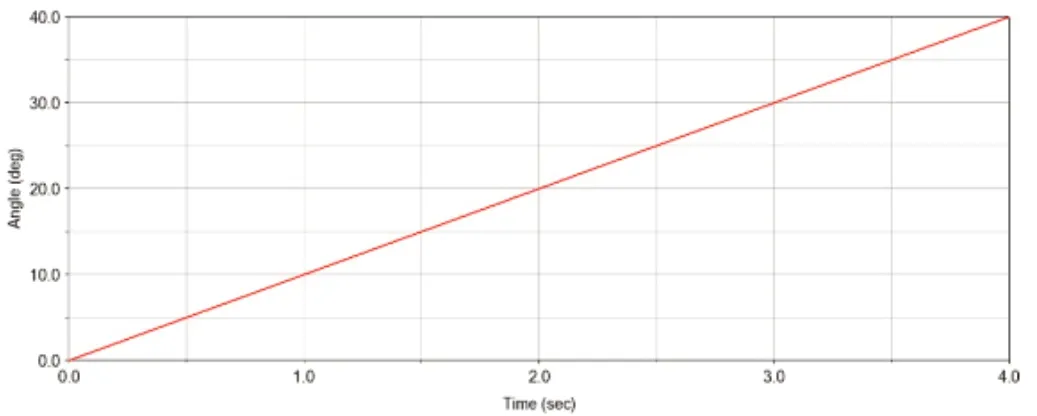
图11 -1 涡卷弹簧转角变化
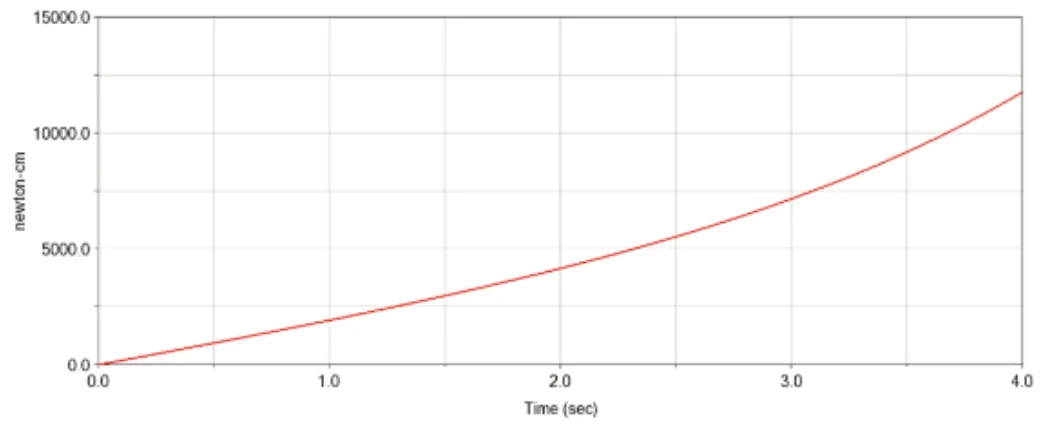
图11 -2 涡卷弹簧扭矩变化
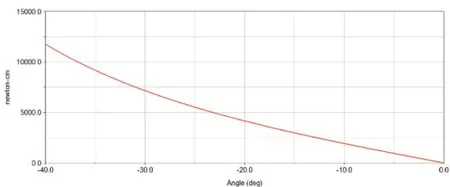
图11 -3 仿真涡簧刚度曲线
将旋转角设置成曲线横坐标,仿真后测量处理得到涡簧的刚度曲线如图11-3所示。当涡卷弹簧中心受到一个恒定的角速度作用时,涡簧自身会产生扭矩并对旋紧产生影响,其具体的刚度曲线趋势表现为起初呈线性变化,之后改为斜率逐渐增大的渐增型曲线[6]。
仿真中涡簧旋转初期,涡卷弹簧在圏与圈的节距空间内旋转,外层圈只受径向力和轴向力的作用而发生变形,涡簧的形变均匀,刚度曲线呈正比例变化;当旋转到一个临界角度时,涡簧各圈逐渐卷紧,其全长方向均发生变形,各圈所受的切力和轴力大小不等,导致涡簧形变不均匀,刚度曲线从刚开始的线性相关变为渐增型。
4 结束语
以无动力助行器及涡卷弹簧储能装置为研究对象,提出了平面涡卷弹簧的储能设计、仿真分析方法。建立平面涡卷弹簧模型,进行了柔性体设计分析。通过结构设计、仿真分析、理论对比,对涡簧刚度曲线进行了分析。研究表明,此储能装置能够满足人体行走的强度性能要求并对行走起到辅助作用。