基于人车协同的感应式路段行人过街信号控制系统设计
2021-07-08何广进徐新东树爱兵朱远建
何广进, 徐新东, 树爱兵, 朱远建
(1.公安部交通管理科学研究所, 江苏无锡 214151; 2.无锡华通智能交通技术开发有限公司, 江苏无锡 214151)
0 引言
我国城市道路中路段行人过街场景的信号设计往往以提高机动车通行效率为主,而忽视了行人的等待时间和通行延误,美国的公路通行能力手册建议,当行人的延误超过30 s时,行人就会变得不耐烦,很可能出现不服从交通规则行为,从而造成与机动车通行冲突。因此,研究有效的行人过街信号感应控制关键技术对于保障行人过街安全,满足行人高效过街需求,提高行人过街通行效率和质量具有重要意义。
在行人过街信号控制方法方面,国内外许多学者己经进行了大量的研究和应用。国外学者Barbara Preston等人[1]对按钮式信号控制下的行人过街行为和安全性进行了研究,得出行人过街闯红灯的概率与机动车车头时距有关的结论;K. LOVEJOY等人[2]利用视频检测器检测人行横道上的行人,在不对信号配时修改的前提下,调整行人的清空时间,减少行人和车辆的交通冲突、提高行人交通安全。国内学者郑长江等人[3]研究了路段行人过街信号与交叉口信号联动控制方法,全面分析了单点行人过街信号配时、行人过街信号与交叉口信号联动控制的优化方法;何赏璐等人[4]根据行人过街需求、路段车辆到达等因素,设计提出了一种路段行人过街感应信号控制的方法;肖梅等人[5]针对行人密度波动大的路口,以行人等候数量和行人等候时长为基础,提出了以行人过街请求为主的交通信号配时方法及系统。
国内外现有的行人过街信号控制研究及应用中,主要以检测行人为主,当检测到有行人过街需求时向信号控制机发送行人过街信号请求,类似于按钮触发式,这种方式无法满足不同场景下对行人过街数量及行人等待时间的需求,未考虑不同行人数量下对过街等待时间的影响以及路段机动车的通行状态。同时,现有控制方法均采用插入固定行人相位,易造成不同数量下行人过街时间浪费或过街时间不足两种情形,无法兼顾行人过街安全及路段行人过街整体通行效率。
因此,本文针对现有信号感应控制方法的不足,结合感应控制原理、行人过街信号配时理论以及对机动车通行状态的检测,设计综合考虑人车协同控制需求的路段行人过街感应控制系统,实时动态响应不同层级的行人过街需求,优化行人过街信号配时,同时将检测到的行人过街信息通过车联网C- V2X技术实时推送至车辆,提醒驾驶员注意过街行人,能够有效提升路段行人过街的整体通行效率和质量。
1 系统框架
基于人车协同的感应式路段行人过街信号控制系统包括行人视频检测器、机动车视频检测器、数据融合处理模块、信号感应控制功能模块、路侧通信单元、交通信号控制机、信号灯以及行人过街辅助设施,系统框架如图1所示。

图1 基于人车协同的感应式路段行人过街信号控制系统框架
行人视频检测器主要通过划定行人过街等待区域,对行人检测区域内的行人数量实时采集,并实时传输至数据融合处理模块;
机动车视频检测器实时采集路段机动车检测线圈处车头时距并传输至数据融合处理模块;
数据融合处理模块根据实时收到的行人采集及机动车车头时距等信息融合处理后,实时传输至信号感应控制功能模块;
信号感应控制功能模块内设有不同行人数量对应的不同等待时间阈值以及行人信号配时算法,根据路段行人过街信号感应控制原理,计算行人过街请求及行人过街信号配时,发送至信号执行模块请求切换行人相位;
信号执行模块收到请求后,判断机动车相位满足最小绿灯时间要求后,给予行人相位的放行;
信号控制机将收到的行人过街信息发送至路侧通信设备RSU,然后推送给路段车辆注意过街行人;
行人过街辅助设施主要为行人提醒标志、语音播报装置等,用于行人过街提示及行人信号反馈播报等。
2 数据采集系统
2.1 行人视频采集
路段行人过街视频检测区域为斑马线两侧行人过街等待区域,视频行人检测器安装杆件位于斑马线两侧,杆件高度为5 m,悬臂0.6 m,立杆位置距离行人等待区域水平距离2~3 m,视频行人检测器安装在悬臂上,向下倾斜一定的角度对准行人等待区。视频行人检测区域交通组织包括在行人检测区域的地面设置行人检测区域彩色标线及“行人等待区、视频识别行人过街”字样的标志牌,安装实施如图2所示。
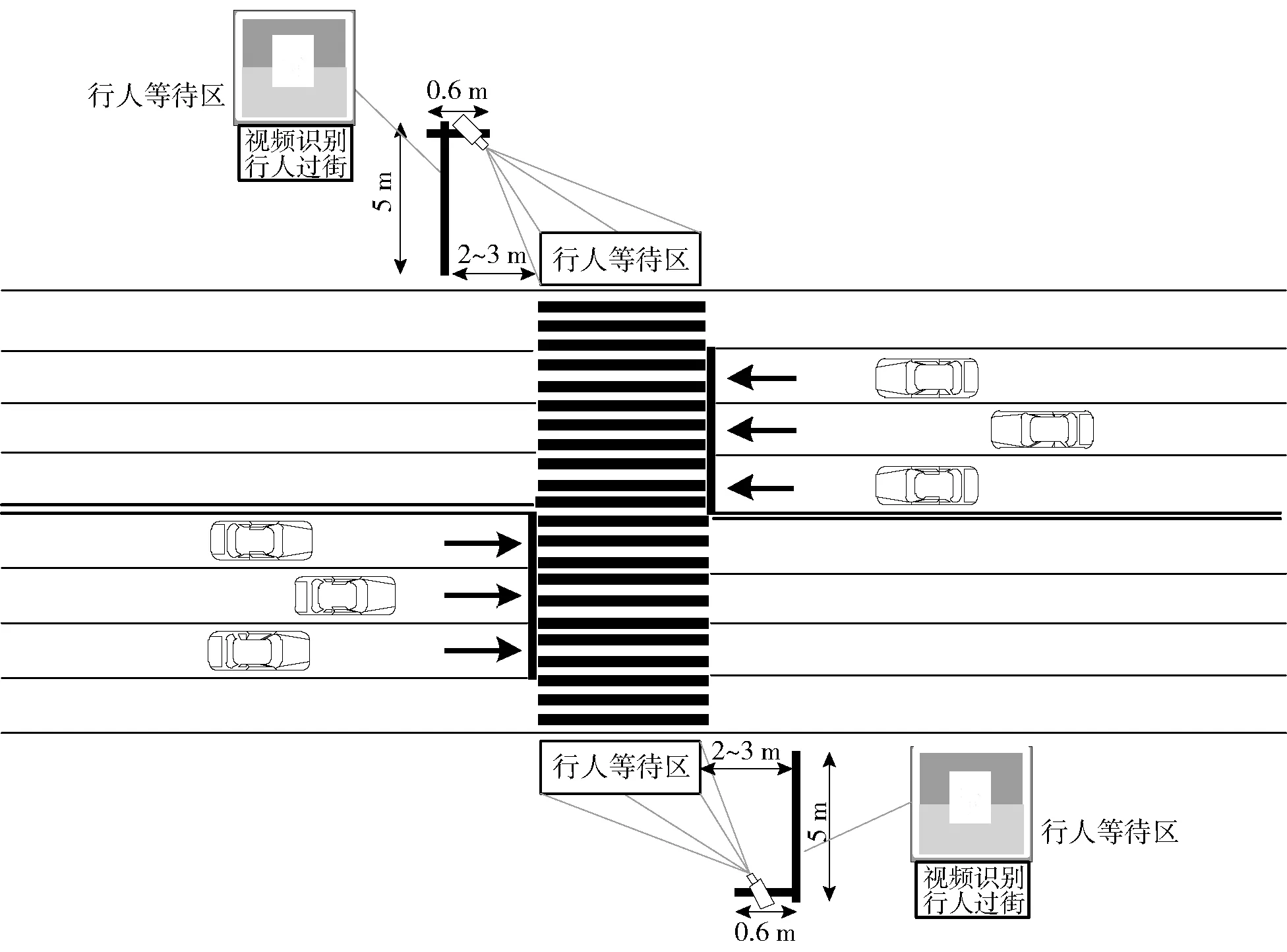
图2 行人视频检测器安装实施示意图
行人视频检测器主要采集行人行走方向、行人到达时间、行人离开时间、行人等待区数量等数据。视频实时检测行人进等待区域、出等待区域,在信号感应控制下,仅需获取有过街需求的行人数据,如,对向闯红灯行人则过滤该数据;实时检测等待区行人到达时间,对每个行人进入等待区域时记录其到达时刻,用于过滤短暂停留行人和行人绿灯延长判断等;实时检测等待区行人离开时间,对每个行人离开等待区域时记录其离开时刻,用于过滤短暂停留行人等;实时检测等待区域内行人数量,用于信号感应控制下不同行人数量对行人绿灯信号的请求及信号初始绿灯时间的计算。
2.2 机动车视频采集
机动车视频检测器主要布设于路段机动车进口车道电子警察杆的横臂之上进口道路中间,摄像机镜头方向与车流方向相反,可同时监测3~4个进口车道的交通流。常规条件下,电子警察杆件高度不应低于6.5 m,摄像机的安装俯角为25~30度左右,与进口道停车线的水平距离S1为15~20 m,高清摄像机在监控方向上由于安装倾角导致无法检测的区域距电子警察安装杆水平距离S2为10~15 m,高清摄像机可监视的视野距离S3为40~60 m,检测线圈设置距停止线80 m处,安装实施如图3所示。

图3 机动车视频检测器安装实施示意图
机动车视频检测器主要采集路段机动车流的车头时距,当采集到的车头时距大于某个阈值时,可认为机动车流中断,路段行人过街出现可穿越机动车流空挡,可用于行人过街信号感应控制。
3 路段行人过街信号感应控制系统
3.1 路段行人过街信号感应控制考虑因素
路段行人过街信号感应控制系统设计时,应考虑以下因素:
(1)充分考虑不同等待行人数量下的不同等待时间需求;
(2)充分考虑人车协同控制,在行人相位请求时考虑路段机动车通行的车头时距;
(3)行人过街配时以不同等待行人数量为基础进行初始绿灯时间设计;
(4)行人绿灯延长时间基于后续到达行人进入检测区域时间间隔进行决策。
3.2 路段行人过街信号感应控制原理
基于人车协同的路段行人过街信号感应控制的行人请求原理:对首个到达行人开启最大等待时间的倒计时,同时视频实时检测路段机动车通行状态,当机动车视频检测到机动车车头时距大于某一阈值时,信号感应控制功能模块发起行人过街信号请求,信号执行模块在确保机动车相位绿灯时间超过最小绿灯时间后,切换至行人过街相位;当机动车视频检测到机动车车头时距始终低于该阈值,同时行人等待区域行人数量不断增加,通过预设的不同数量下不同的行人等待时间阈值,取时间最小值发起行人过街相位请求,在确保机动车相位绿灯时间超过最小绿灯时间后,切换至行人过街相位。
基于人车协同的路段行人过街信号感应控制的行人配时设计原理:当行人过街相位发起请求时,信号感应控制功能模块根据此刻行人检测区域的行人数量计算出行人过街绿灯初始时长,当后续行人到达与等待检测区最后一个行人绿灯延长结束时刻的时间间隔小于阈值时,此时行人过街绿灯延长,时间为预先设定的后续到达的行人绿灯可延长时间,直到时间间隔大于该阈值时,行人过街绿灯不再延长,行人过街相位结束。另外,当行人等待数量低于斑马线每行队列最大行人数量时,行人过街绿灯初始时长为行人过街最小绿灯时间;当行人等待数量大于斑马线每行队列最大行人数量时,行人过街绿灯初始时长为行人损失时间、等待行人全部进入人行横道时间、行人穿越人行横道时间总和。
3.3 路段行人过街信号感应控制流程
基于人车协同的路段行人过街信号感应控制流程主要分为路段行人过街信号请求控制流程和路段行人过街信号配时优化流程。基于人车协同的路段行人过街信号感应控制系统包括行人视频检测器、机动车视频检测器、数据融合处理模块、信号感应控制功能模块、路侧通信单元、交通信号控制机、信号灯等。
(1)路段行人过街信号请求控制流程
行人视频检测器对斑马线两侧的行人等待区内实时采集到的视频流进行分析,对行人等待区内行人数量、行人行走方向、行人的到达时间等数据进行处理,并将处理后的结构化数据实时传输至数据融合处理模块;
机动车视频检测器对路段两个进口道的机动车检测区域内采集到的视频流进行分析,对机动车检测线圈处车头时距进行数据处理,并将处理后的结构化数据实时传输至数据融合处理模块;
信号感应控制功能模块内预设不同行人数量对应的不同等待时间阈值,在收到数据融合处理模块传输的行人及机动车数据后,结合当前过街行人数量和机动车通行状态,计算行人过街请求,将结果发送至信号执行模块,以决定是否切换行人过街相位;
信号执行模块在收到信号感应控制功能模块发送的行人过街相位请求及信号配时后,判断机动车相位满足最小绿灯时间要求后,给予行人相位的放行,控制行人信号灯从红灯状态切换至绿灯状态,同时信号控制机将收到的行人过街信息发送至路侧通信设备RSU,然后通过车联网C- V2X技术推送给路段车辆注意过街行人,信号请求控制流程如图4所示。

图4 路段行人过街信号请求控制流程图
(2)路段行人过街信号配时计算流程
行人视频检测器对斑马线两侧的行人等待区内实时采集到的视频流进行分析,对行人等待区内行人数量、行人行走方向、行人的到达时间、行人的离开时间等数据进行处理,并将处理后的结构化数据实时传输至数据融合处理模块;
数据融合处理模块根据实时收到的行人视频检测器的行人数据处理后,实时传输至信号感应控制功能模块;
信号感应控制功能模块内设有行人信号配时算法,根据收到的行人等待区内行人数量及行人到达状态,计算行人过街绿灯初始时长以及行人绿灯延长时间,发送至信号执行模块;
信号执行模块在收到信号感应控制功能模块发送的行人信号配时方案后,判断机动车相位满足最小绿灯时间要求后,执行该信号配时方案[6],信号配时计算流程如图5所示。
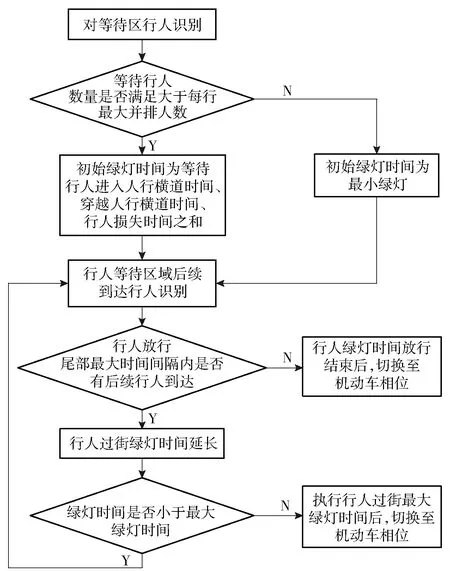
图5 路段行人过街信号配时计算流程图
3.4 路段行人过街信号感应控制参数设计
(1)行人过街最小绿灯时间gmin
行人过街最小绿灯时间gmin[7]指的是当等待行人过街数量低于人行横道每行最大并排人数时所需的最短绿灯时间,计算公式为:
(1)
式中:gmin为行人过街最小绿灯时间(s);L为行人过街人行横道长度(m);Vp为行人平均步速(m/s);I为行人绿灯间隔时间(s)。
(2)等待行人全部进入人行横道时间gj
等待行人全部进入人行横道时间gj为路段过街行人从绿灯开始后全部进入人行横道的时间[8],计算公式为:
(2)
式中:gj为等待行人全部进入人行横道时间(s);p为等待过街行人数量(人);d为人行横道宽度(m);ω为单个行人进入人行横道的行走所需空间宽度(m/人);tj为等待队列中每行行人进入人行横道的时间间隔(s)。
(3)行人穿越人行横道时间gc
行人穿越人行横道时间gc指行人在人行横道上通行时间[9],计算公式为:
(3)
式中:gc为行人穿越人行横道时间(s);L为行人过街人行横道长度(m);Vp为行人平均步速,取双向行人步速平均值(m/s)。
(4)行人损失时间l
降水第四阶段:26日01—20时,两站都先由大到暴雨后转为小到中雨。降雨期间两站的可降水量基本上维持在基值以上,且总体值变化较均匀,值得注意的是蒲江站在08时可降水量快速上升了10 mm,此时降雨强度也达到最大。随着降雨结束,可降水量曲线呈逐渐下降趋势。
与机动车类似,行人也有一定的损失时间,行人损失时间l计算公式为:
(4)
式中:l为行人损失时间(s);ti为等待区行人第i行队列进入人行横道的超时(s)。
(5)行人绿灯延长时间ty
行人绿灯延长时间ty指的是后续到达行人等待区的行人从等待区进入到人行横道的时间,计算公式为:
(5)
式中:i为后续到达行人的列数;Δt为行人放行尾部最大时间间隔(s);Δty为后续到达的行人绿灯可延长时间(s);tih为后续第i列到达的行人进入行人等待检测区域的时刻(s);tiz为后续第i列行人到达时上一个行人绿灯延长结束时刻(s)。
4 应用实例
本文设计的基于人车协同的感应式路段行人过街信号控制系统已在位于昆山市长江中路—圆明路的行人过街信号控制路段实施应用,安装了包含视频检测器、数据融合处理扩展器、内嵌信号感应控制功能模块的路段行人过街信号机等设备如图6、图7所示。

图6 长江中路- 圆明路视频检测器安装

图7 路段行人过街信号机
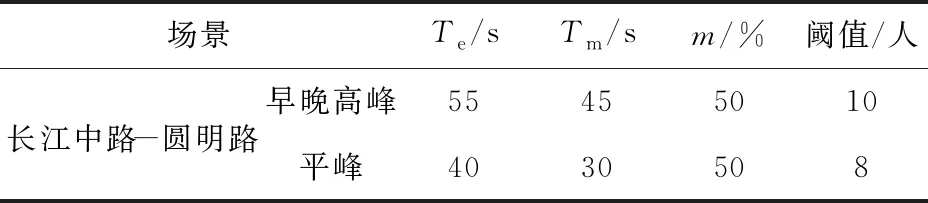
表1 长江中路- 圆明路信号控制参数
经过一段时间运行后,对该路口的行人过街平均延误、机动车平均通行延误及行人平均闯红灯次数等前后结果进行统计分析,如表2所示。

表2 长江中路- 圆明路行人过街效果评估
综上所述,在应用本文设计的基于人车协同的感应式路段行人过街信号控制系统后,长江中路- 圆明路路口的行人平均过街延误和行人闯红灯次数有明显的改善,机动车平均通行延误也有一定的降低,该应用效果证明了本文设计的行人过街信号控制系统的实用性,能够对信号控制路段行人过街的综合通行效率有一定的提升作用。
5 结论
本文设计的一种基于人车协同的感应式路段行人过街信号控制系统,综合等待区行人数量和机动车通行状态,实现实时动态响应行人过街信号请求及信号配时优化计算。实地应用结果表明:该系统能够兼顾行人过街安全及路段行人过街整体通行效率,显著降低了机动车和行人平均通行延误,减少了行人闯红灯现象,有效提升了路段行人过街的整体通行效率和质量。但本研究未考虑过街行人年龄、性别等因素对行人过街需求的影响,同时也未考虑非机动车等因素对行人过街的干扰。因此,仍有待下一步研究,进一步提高系统在信号控制的路段行人过街场景中的适用性和实用性。
