基于大数据平台的物流分拣机构的研发设计
2021-07-08李春阳
研究背景
伴随着物流装备市场的快速发展,物流市场的未来将存在着不可预估的可能性。在经济转型升级的大背景下,许多制造企业开始以物流端为切入点,对企业运作进行自动化转型升级,“智能工厂”作为制造业自动化物流的重要模块将备受关注。国内外市场正逐渐进入高速发展阶段,中国企业可在此背景下寻找机会,创造新的机遇。
研究概括
分拣设备机械臂的研发采用的是仿生技术进行设计,依据手臂的运转机理,研发出一款具有推理、判断及使用机械臂自行解决物流分拣中的问题的能力。主要特点表现为:智能化、一体化、层次化、柔性化、社会化。主要智能机理体现为:智能获取技术、智能传递技术、智能处理技术、智能运用技术。可快速实现物流云端的信息采集和整理,解决了运输终端的分拣、分类、拆包、存储等多个难题。位于终端的货物运输交接过程中通过机械臂进行抓取分类,可根据前端数据库的信息传输,以及终端的物象识别功能,进而精确地进行物流快递的分拣。
大數据平台
搭建全球化的物流信息平台,前端采集信息整理后传递到云端数据库及终端设备。设备终端的芯片负责数据分析处理,此机理模拟人的大脑,利用芯片进行信息存储、信息识别及信息分析,真正意义上地实现了物流分拣技术的开发。在联系物联网的联合使用下,能够更加全面充分地达到工作需求,促使工作流程的格式多样化,操作更加灵活,进一步提高了分拣效率,解决了现有的物流技术和模式的单一性,突破了不能够进行多样化的分拣的关键技术。
分拣机构
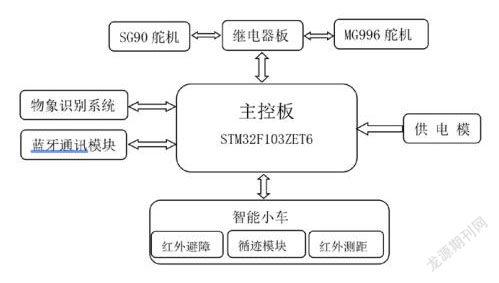
快速分拣机构:动力装置、工作台、机械臂和控制面板。动力装置属于整个物流分拣设备的动力总成,负责提供动力输出;工作台与控制面板实现了信息化的计算管理,同时控制机械臂的工作运转;智能小车:负责运载;机械臂属于整个分拣设备的主要设备。
PLC控制技术
硬件控制部分:智能小车和机械臂,使用STM32F103ZET6作为主控芯片。在小车的作用下,机械臂的作用发挥到最大化,实现“定点抓取排放”。智能小车带有红外避障模块、循迹模块、红外测距模块功能,能够进行智能移动。机械臂硬件部分在建模软件设计仿生手臂,机械臂设计六个自由度。机械臂的运动由多个180度SG90舵机和360度MG996大扭力舵机进行转动完成,便捷精确地把快件放置到相应的位置。机械臂配备射频识别模块对快件信息进行扫描识别,将物品分类放置。
工作流程
通过物象识别技术,将此技术应用到物识物流识别系统当中,在大数据的信息库当中,我们会对物品进行信息采集、储存、传输、反馈。PLC分拣系统的控制器可实现自动化的控制,最后在物流终端的分拣系统进行物象识别时就会得到反馈信息,同时信息将会传输到机械臂,进行分类、分拣、拆包、存储的处理。我们以大数据搭建全球共享平台,真正意义上地实现了物流信息的全球化。
总结
便捷高效:在工业物联网时代,利用PLC技术物流终端分拣设备进行控制,自动化程度较高,可实现工业与社会之间互联;准确识别:通过物象信息对物流精准识别,避免人工取件时造成的失误;数字化管理:云端搭建信息平台,可针对物流信息及时进行更新处理。在以大数据建设为基础,互联网与物联网的联动下,传感器的自动控制推动下,工业信息化的全球时代将指日可待。
参考文献:
[1]刘星余.面向物流仓储分拣机器人的多目标视觉识别与定位方法研究[J].粘接,2021,47(07):109-112.
[2]王松,王培俊,李聪,等.基于Web的物流自动化分拣系统虚拟实时定制设计[J].物流技术,2010,29(17):124-125.
[3]嵇莉莉,陆丽宇.基于可叠加物流箱的高效快递分拣策略[J].物流技术,2021,40(02):132-134.
[4]杨钰,杨磊,张晓楠.一种应用于物流行业的自动分拣控制系统[J].哈尔滨理工大学学报,2019,24(04):71-77.
第一作者:李春阳(1998—),黑龙江五常人,现就职于中国核工业二三建设有限公司。