基于人体姿态识别的智能家居控制算法研究
2021-07-08陈彪
编者按:基于资料分析、调查分析、总结研究等方法展开关于智能家居的思考,提出了一种基于人体姿态识别的智能家居控制的方法。提出了通过家居人体姿态控制算法(HBPCA)模型控制家居各个部件、家具、电器的方法。希望通过本方法推动智能家居的发展。
研究背景及现状
现状背景
为进一步了解基于姿态识别的智能家居现状背景,本人展开了相关的资料、案例调查,发现目前相近的技术主要包括:基于便携式传感器的人体姿态识别技术、基于视频检测的人体姿态识别技术。
思考分析
基于便携式传感器的人体姿态检测方法局限于设备,需要实时佩戴传感器,当行动不便或者忘记佩戴,则无法监测人体姿态情况。基于视频检测的人体姿态识别技术的精度高,且克服了佩戴的问题,但存在隐私暴露和在物体遮挡下无法识别的问题。且该方法会受光线、背景环境等因素的影响。
对于此缺陷,本文提出了一种新方法:基于光学摄像头和红外阵列传感器的人体姿态识别方法。
针对智能家居的需求,本文引入基于光学摄像头和红外阵列传感器的人体姿态识别方法,并且引入3D卷积和3D反卷积理论,构建了基于姿态识别的智能家居控制算法网络(Home body posture control algorithm,HBPCA)。
家居人体姿态控制算法
解决的技术问题
本文针对基于人体姿态识别的智能家居控制的需求分析,最终提出了基于光学摄像头和红外阵列传感器的HBPCA算法,其中主要解决的技术问题有以下几点。
1.数据处理
本文采用光学摄像头和红外阵列传感器同时采集人体姿态数据,在进行数据采集与处理时,主要解决的工作包括:数据采集的差异性、数据融合问题、数据集划分。
2.特征网络的构建
通过红外阵列采集的特征数据,由于位置问题、姿态问题,可能会存在特征信息不足和特征信息小等问题,针对此问题,需要选取合适的特征提取网络。
3.HBPCA的训练优化
搭建好HBPCA后,需要对HBPCA进行训练优化,期间解决的问题主要包括:训练方法、训练步骤的、参数选取、模型部署等相关的工作。
系统过程方案
1.系统总体架构
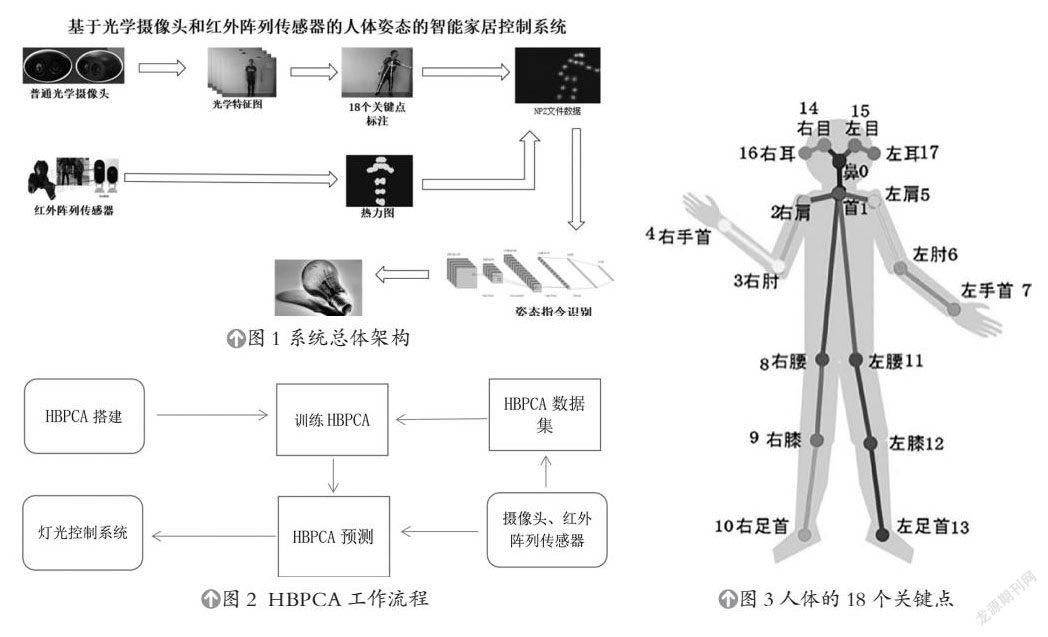
根据以上的基于光学摄像头和红外阵列传感器的HBPCA灯光控制的描述与分析,建立架构系统,总体框架如下。
总体框架过程描述:
本方案主要包括两部分:数据采集与处理部分、姿态指令识别部分。
(1)数据采集与处理部分
第一,普通光学摄像头采集光学特征图;
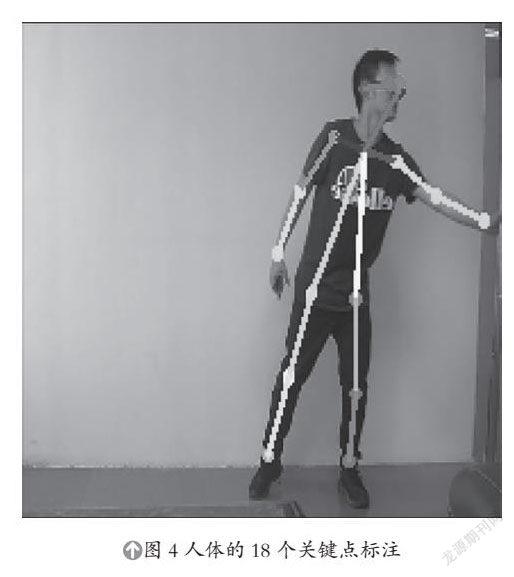
第二,在光学特征图上进行人体的18个关键点标注;
第三,红外阵列传感器采集热力图;
第四,数据对齐处理,生成NPZ文件数据;
(2)姿态指令识别部分
第一,基于NPZ文件数据训练HBPCA模型;
第二,将采集到的姿态数据,输入到HBPCA,进行人体姿态识别;
第三,将HBPCA识别到的人体姿态数据指令传输给灯光控制系统,灯光控制系统相应做出指令响应。
2.HBPCA的搭建思想
本发明基于局部极小值局限性,学习过程收敛速度,精度综合考虑网络结构的隐层、隐层节点数以及相关的函数。
步骤1:创建HBPCA。
步骤2:创建HBPCA数据集——npz数据集,将该数据作为HBPCA训练数据输入,训练HBPCA模型。
步骤3:普通摄像头和红外阵列传感器采集人体姿态数据指令。
步骤4:将采集的人体姿态数据指令输入到HBPCA训练好的模型中,HBPCA识别人体姿态数据指令。
步骤4:灯光控制系统接收到人体姿态数据指令,并做出相应的指令。
HBPCA设计
1.数据处理
本发明使用红外阵列传感器在数据处理时,遇到的主要问题:特征提取。基于此,本发明提出了数据融合的方法——通过普通光学摄像头采集光学特征图;然后标注人体的18个特征点,如图3、图4;最后通过基于时间戳的数据对齐的方法,将热力图和光学特征图进行数据对齐融合生成npz数据组。
2.网络结构
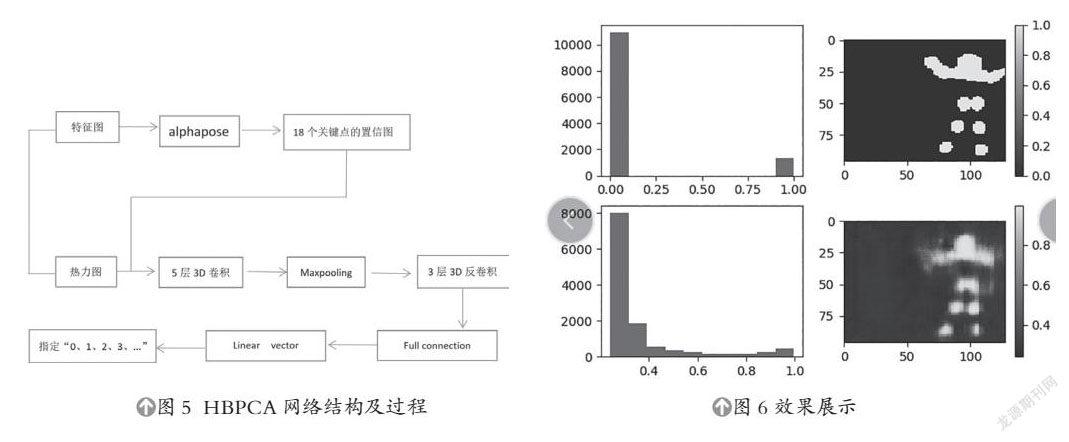
本发明由alphapose网络、5层3D卷积、maxpooling、3层3D反卷积、全连接层构成,网络结构与过程如图5:
在HBPCA中,先通过alphapose网络生成人体姿态关键点的置信图,接着经过四层3D卷积、maxpooling、四层3D反卷积提取图像特征,经过Full connection层,生成线性向量,输入姿态指令(如“0”表示关、“1”表示开灯、“2”表示打开窗户、“3”表示打开空调等)
3.HBPCA训练
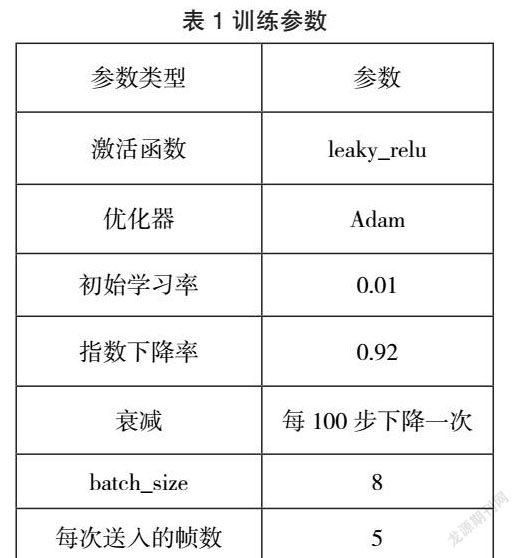
(1)训练参数
训练的参数设置如表1:
(2)訓练过程
HBPCA算法搭建训练步骤如下。
步骤1:预处理图像。
步骤2:普通光学特征图、热力图数据处理。
步骤3:将处理后的数据写入 npz文件。
步骤4:定义HBPCA网络模型。
步骤5:选择训练策略——随机梯度下降。
步骤6:设定合适的batch-size、学习率、优化器等参数。
步骤7:HBPCA训练,打印训练过程中的损失值,保存 epoch 模型,使用验证数据集进行验证,打印验证结果,并存入训练日志。
步骤8:导入测试数据,进行测试。
步骤9:测试数据集上进行模型评估。
结果评估
基于HBPCA系统,对轮形数据集进行分析,构建知识图谱、训练集,搭建神经网络结构,其中网络准确率高达96.5%。
对结果文件进行效果展示,构建不同步数下的直方图和基于热力图的姿态效果,如图6所示。
结束语
21世纪以来,信息高速发展,云计算、大数据、物联网、人工智能等信息技术与各个行业逐步深入融合,关于人工智能相关的理念涌入市场。基于深度学习的算法理论百花齐放,为智能家居发展提供了良好的信息技术环境。
参考文献:
[1] 刘勇,李杰,张建林,等. 基于深度学习的二维人体姿态估计研究进展[J]. 计算机工程,2021,47(3):1-16.
[2] 周燕,刘紫琴,曾凡智,等. 深度学习的二维人体姿态估计综述[J]. 计算机科学与探索,2021,15(4):641-657.
[3] 乔迤,曲毅. 基于卷积神经网络的2D人体姿态估计综述[J]. 电子技术应用,2021,47(6):15-21.
[4] 刘洁,李毅,朱江平. 基于双相机捕获面部表情及人体姿态生成三维虚拟人动画[J]. 计算机应用,2021,41(3):839-844.
作者简介:陈彪(1994--),男,汉族,湖南人,研究生,AI算法工程师,深圳市信润富联数字科技有限公司,研究方向:AI视觉。