基于无线通讯的精密钢轨平直度测量仪的设计
2021-07-07宋合志张宪金
宋合志,张宪金
(北京劳动保障职业学院,北京,100029)
0 引言
近年来,中国高速铁路技术有了飞速的发展,这对机车线路检测维护的精度要求越来越高。轨道是机车运动的载体与基础,其中,作为轨道中最重要的组成部件钢轨直接承受机车、车辆荷载,其技术状态和水平直接影响着铁路的运输能力和行车安全。
目前,铁路部门使用手工检测的方法落后,即使用1m钢尺,紧贴钢轨的轨面和侧面,结合塞尺进行测量,人工记录,不仅效率低下而且精度低,已了经远远不能适应高速铁路时代的钢轨平直度自动化测量的需求。钢轨顶面短波不平顺一方面对铁路行车的噪音、振动、安全和轮轨冲击荷载均有很大影响,另一方面钢轨轨面短波不平顺引会引起增大车轮对钢轨的荷载、导致轮轨间形成巨大的作用力,可能会引发钢轨、车轮及部件的损伤断裂,导致安全事故。因此,开发高精度、高效轻便的轨面短波不平顺检测装置----新型的钢轨焊接接头平直度检测仪,意义重大。
1 系统结构设计
1.1 测量原理分析
钢轨平直度测量仪器工作时,仪器固定于钢轨的顶面(单面测量),步进电机在上位机软件控制之下带动测量部件(主控电路板、激光器、ZigBee模块、霍尔传感器等)移动。激光传感器的检测原理是激光三角测距法,即激光束垂直于被测平面发射,然后CCD技术检测反射激光束的精确位移,即可通过计算获取被测平面到激光发射器的较精确的距离。
1.2 系统结构图
系统简易结构框图如图1所示,其中,1.测量仪支架(外壳);2.导轨;3.控制主板;4.激光传感器;5.步进电机;6.霍尔传感器;7.电池;8.便携电脑(PDA)

图1 系统结构简图
控制主板的结构功能框图如图2所示,其中:1.CPU;2.控制总线;3.光电隔离芯片;4.电机驱动芯片;5.步进电机控制接口;6.无线传输模块;7.霍尔传感器接口
钢轨平直度检测仪主要由机架、便携电脑两大部分组成。
系统简易结构框图如图1所示,其中,机架部分包括测量仪支架(外壳)、导轨、控制主板、激光传感器、步进电机、霍尔传感器、电池等,是测量仪表的前端,也是系统的主体部分,主要接收、执行上位机的指令,并完成具体的移动数据采集、初步处理好和串行传输任务;便携电脑(PDA)包括嵌入式主机、电池、外接无线传输模块等,主要完成相应操作指令的发送、数据的接收、处理、计算与显示。控制主板的结构功能框图如图2所示,控制主板是下位机的核心部分,包括CPU、控制总线、光电隔离、电机驱动、步进电机控制、无线传输模块和霍尔传感器接口等。

图2 控制主板结构框图
其中,主要的功能模块如下所述:
传感器:一种高精度的线性激光位移传感器,可输出与位移成线性关系的模拟信号,在前向通道中,经过处理的微弱的模拟信号,被送入STM32F103的高速采样端口,完成前端数据的采集工作。
无线传输模块:具有双向通信功能,将控制主板采集到的AD数据,通过ZigBee技术以无线方式传输到便携电脑(PDA),同时,可以将便携电脑(PDA)的指令信息发送到STM32F103的数据接收端口;电源模块:是平直度的关键的功能单元之一,通过DC/DC降压和升压技术,为激光传感器、控制主板等提供精准直流稳压电源;便携电脑主机:对数字化信号进行处理、存储,实时显示测量数据,判断数据(测量误差)是否超限,并实时显示钢轨平直度的不规则的数据波形。
2 硬件平台设计
2.1 系统硬件基本结构
其中:1.激光器;2.激光器信号调理通道;3.DC-DC电源变换单元;4.STM32F103CT6微控制器;5.步进电机;6.步进电机驱动电路;7.开关型霍尔器件;8 .霍尔器件信号处理电; 9.系统调试串;10和11 .ZigBee串行通信模块;12 PDA手持终端。
2.2 硬件平台设计概述
系统硬件平台包括下位机和上位机(PDA)两部分,STM32F103VET6是意法半导体有限公司生产的32位基于Cortex-M3内核的增强型的微控制器,本文选用STM32F103 VET6,作为数据采集器的控制芯片,同时,配置其他外围硬件电路,在上位机的指令下,主要完成激光测控与数据传输任务,包括步进电机的精密步进驱动、激光器精密高速采样、霍尔位移检测,数据处理与传输等。STM32F103VET6芯片功能强大而且功耗极低,其中12通道的DMA控制器,支持ADC、SPI、USART等众多片上外设,极适合于对模拟信号的高速数据采集。STM32F103VET6拥有众多GPIO口,其中,3个GPIO口用于电机驱动芯片输出控制,1个GPIO口用于霍尔检测;另外,还需要2个UART串行通信接口,用于和上位机或PDA的通信,1-2路12位ADC采样接口,用于采集激光传感器位置信息。电机驱动部分选用THB6128作为步进电机驱动芯片。为了增强系统的稳定性,电源部分设计采用了隔离措施,另外,为得到稳定的传输数据,为ZigBee无线通信模块设计制作了专用微型天线,在不增加空间体积的情况下,增大了通信距离,提升了数据传输的稳定性。
ZigBee技术是一种低带宽、速率可调的短距离无线通信技术,具有节点密集、低功耗、方便路由、安全等优点,目前已经广泛应用于物联网的工控和物联网无线传感器网络领域。
本硬件设计中,用于测量的装置与上位机之间通过ZigBee无线模块进行通信,给工程测量提供极其便捷的操作方式。
上位机PDA是一个基于嵌入式Windows CE操作系统下、以32位ARM920T高速处理器内核为核心的控制平台,实时性好,可支持多任务切换,控制系统平台上的人机交互界面。如图3所示,PDA通过10、11两个ZigBee模块,实现与下位机之间的无线信息传输。

图3 硬件电路框图
3 系统软件设计
如上所述,精密平直度测量仪包括上、下位机两部分组成,两者之间通过一对ZigBee通信模块进行数据的交换。即由上位机主动发起通信指令,包括:测量、重发数据、停止测量等几种指令,组成不同的指令信息帧,通过串行通信端口和ZigBee模块发往下位机;同时,上位机本身也设置成串行中断接收模式,以中断模式接收来自下位机的数据和回复信息,并以时钟控件作为嵌入式系统任务调度的时间参考。
3.1 下位机软件设计
在下位机中,设置STM32F103VET6微处理器的串口,以中断模式进行数据的接收与发送。如图4所示,是下位机主程序流程图,在进行一系列初始化设置之后,下位机的微处理器便进入循环判断与等待之中,有“测量”、“重发”、“停止”等三条指令及其对应的指令标识,并调用相应的子程序完成具体任务。其中,“测量”指令对应的子程序最为复杂,担负着三个核心任务:

图4 主程序流程图
其一,启动步进电机,根据固定的检测流程完成步进电机的复位;
其二,驱动步进电机近似匀速运动,在预定的时间窗内,完成定距运动,并同时采集钢轨表面纵、横两个方向的激光测距数据,并同时存储;
其三,将下位机的实时采样数据传输到上位机。
如图5所示,是下位机的中断子程序流程图,以中断模式接收和发送数据,共完成两大功能。
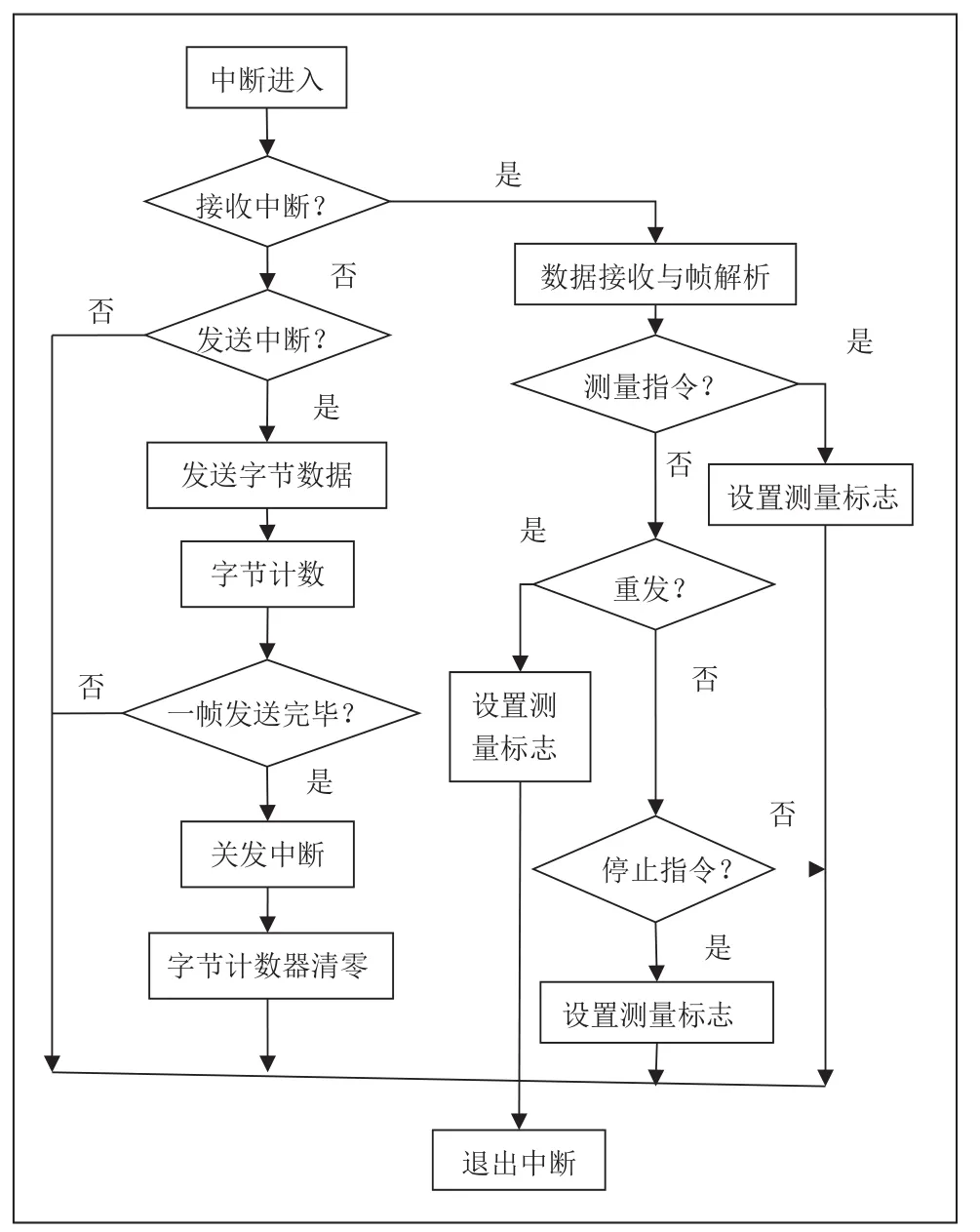
图5 中断子程序流程图
其一,在中断子程序中完成上位机下行指令帧的接收与信息解析,为了降低误码率,采用了“奇”、“偶”校验,根据信息帧的解析结果,设置相应标识位。
其二,将准备上传的采样数据,采用实时发送或定位发送两种模式,及时上传采样数据,以便上位机及时处理,上位机根据接收的数据。经过校验判断,决定是否让下位机重发测量数据。
3.2 上位机软件设计
上位机PDA系统,是一个基于嵌入式Windows CE操作系统下、以32位ARM920T高速处理器内核为核心的控制平台,因此,上位机的软件是一个多任务实时操作系统。分为初始化参数设置、标定、开始测量、计算、停止测量等任务。其中,标定、开始测量、计算是上位机嵌入式系统的核心调度任务,分别完成标准钢轨顶面、侧面的数据标定任务,具体的钢轨顶面、侧面的数据测量任务,和偏差计算、规定范围内偏差坐标显示与最大偏差点的坐标显示等系列功能,其中标定程序流程如图6所示。

图6 标定程序流程图
标定是钢轨平直度精确精密测量的基准和基础,所以如何尽最大限度地拟合标准钢轨的基准面,是平直度设计的核心技术之一,本设计中采用了最小二乘拟合算法和系列平滑滤波技术,使标定值限度地逼近了标准钢轨的理想轨道平面。
4 结束语
钢轨平直度测量仪在1米的测量基长范围内,能够连续测量钢轨的顶面、侧面的平直度数据,测量精度优于0.03mm。基于嵌入式WinCE的PDA软件界面,具有良好的人-机交互界面,即可以直观显示波形曲线,又能输出特定数据,设计中采用了精密激光传感器和先进的改进的最小二乘拟合算法,有着更加精确的测量精度,同时,整个仪器结构紧凑,重量较低,便于携带,“一键”化智能操作,大大提升了检测效率。