结合储能后发电机转子角控制的特性分析
2021-07-07张志斌
张志斌 魏 强
(福州大学电气工程与自动化学院,福州 350108)
0 引言
随着新能源的不断接入,电网的频率控制变得越来越复杂和困难。问题不仅在于风电/光伏的不确定性带来的有功方面的缺额或不平衡,还在于如何将为数众多的新能源发电纳入一次调频和自动发电控制(automatic generation control, AGC)。此外,实践经验表明,现有的AGC在区域互联规模扩大时,还会引发更多的潜在问题(如跨区域的110s周期的功率波动)。这些都给有功调度和控制带来了挑战。
在此背景下,能够自动准确跟踪负荷需求,而且不依赖AGC和调度干预直接恢复频率的发电机转子角控制[1-2]成为一种可能的解决方案。这种控制模式的根本原理是引入全球定位系统(global positioning system, GPS)确定的以恒定工频转速旋转的绝对坐标系,并通过调整汽轮机出力将汽轮发电机的转子角度,由相位测量单元(phase measurement unit, PMU)测量得到,在绝对坐标系中固定下来。由于角度不再持续变动,转速(角度的微分)被维持在额定转速,即实现了无需干预的自动频率恢复。这种特性在分布式新能源广泛接入后可以极大地减轻调度负担,具有显著的优点,相应的机制也已经通过了动模试验验证[3]。
不过,由于提出转子角控制的最初目的为抑制区域间低频振荡,所以转子角控制器会通过调整汽轮机调门开度来提供阻尼转矩。这种方法尽管具有多发电机间电气解耦的优点,但汽轮机调门的强非线性也会导致阻尼转矩相位/大小偏差,影响低频振荡抑制效果。此外,在自动跟踪负荷时,过于频繁的控制动作会引起汽轮机调门的机械疲劳,降低机组寿命。所以,在转子角控制提出之初,就给出了将利用储能方案作为备选[4]。但是当时的储能价格昂贵,无法实用。
近年来,储能在电力系统中的应用越来越广 泛[5-6]。储能不仅可以削峰填谷,解决新能源带来的旋转备用不足问题,还可以参与一次调频,提供短时快速的有功支援[7-8]。此外,还出现了不少利用储能抑制低频振荡的方法[9-12]。这些研究都表明,在电力系统中大规模应用储能的时机已经成熟,所以利用储能的转子角控制有了进一步研究的价值。尤其当现场已经安装了负责消减峰谷差的储能时更是如此(转子角控制只要利用其中很小一部分储能容量即可)。本文通过控制储能出力间接影响/控制发电机转子角的机理,对新机理下的同步/阻尼转矩进行分析计算,并给出新模式下在负荷跟踪时减少汽轮机调整的仿真效果。
1 结合储能的转子角控制器
1.1 转子角下垂控制的原理
转子角控制器与汽轮机调速器相似,均通过控制汽轮机的阀门开度来改变汽轮机的机械功率输出。不同之处在于,调速器以转速偏差为输入,通过控制使转速达到稳定,而转子角控制器以绝对转子角为输入,通过控制使绝对转子角达到稳定。
图1为一种基于汽轮机控制的转子角下垂控制器的控制结构。其中,δ为发电机的绝对转子角,其值可以通过PMU装置进行测量得到[13]。δaim为调度中心提供的绝对转子角的目标值,其数值可以从潮流计算结果间接获取[2]。可以观察到,如果忽略模型的后半部分,该模型的控制部分为一个常见的比例微分(proportional derivative, PD)控制器,Kp为PD控制中的比例系数,Kd为PD控制中的微分系数。
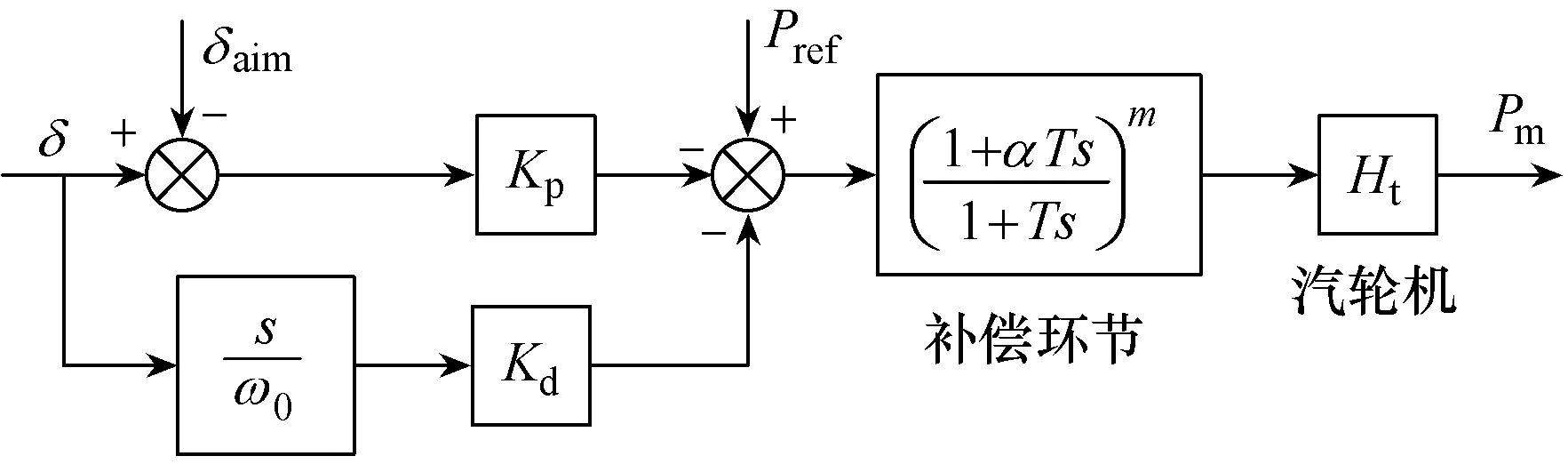
图1 基于汽轮机控制的转子角下垂控制结构
大电网中转子角控制策略的基本实现方法可以概述为:测量发电机转子在GPS决定的旋转坐标系中的位置,根据转子角偏离目标值的情况,增减汽轮机的出力,以此增大或减小发电机转子的转速,使转子角逐渐向设置的目标值复归,以实现将转子在GPS坐标系中的角度固定下来的目的。当所有发电机的转子角在绝对坐标系中都固定下来以后,各个发电机以坐标系的旋转速度旋转,即实现了频率的无差调节。
加入转子角控制器后,并未引进新的电气量,但是其控制的发电机转子角却成为连接发电机机械部分和电气部分的渠道。依据发电机转子角偏离目标值的情况,便可以得知电网的变化,并及时采取相应的措施,实现对负荷变化的跟踪和功率的自动调节。
1.2 结合储能的转子角控制器结构
目前的转子角控制器的命令都会发往汽轮机调门执行,即用汽轮机作为执行设备,让汽轮机同时承担负荷跟踪并提供阻尼转矩功能。但是这种做法会导致汽轮机频繁动作,尤其是控制器内的补偿环节为了实现相位矫正的目的,会给出先超调再回调的控制指令,导致汽轮机调门频繁动作,对机械寿命不利且会提高故障率。
近年来,储能成本的下降使结合储能来实现发电机转子角控制成为可能。这是因为,通过在发电机出口母线处安装储能装置,可以间接地通过控制储能出力来影响发电机轴系上的力矩。储能发电增多,则发电机输出电气功率减少,轴系上负荷力矩随之减少(等效为汽轮机输出力矩增加),反之则负荷力矩增多。也就是说,使用储能可以实现和控制汽轮机开度等效的效果。由于储能不仅可以提供精确的输出变化(对应精准的阻尼转矩方向),还可以方便地在发电/充电状态间切换,减少汽轮机跟踪负荷时的不必要动作,所以结合储能来实施转子角控制成为更好的选择。
图2所示为结合储能的转子角控制器及汽轮机和储能模型。图2中包括汽轮机控制路径和储能控制路径。可以看出,两个控制路径输入相同,但是输出指令分别发送到汽轮机和储能执行。此外,和图1相比,汽轮机控制部分增加有动作死区环节,以尽可能地减少汽轮机调门不必要的动作,同时取消了补偿环节。储能控制部分则加入隔直环节,以保证在稳态时储能系统的充电或放电功率为零。从运行上看,汽轮机部分主要负责对负荷的变化进行跟踪,实现自动负荷跟踪的功能。储能部分则主要负责应对相对频繁的负荷波动(避免此时汽轮机动作),同时为抑制低频振荡提供阻尼转矩。

图2 结合储能的转子角控制器及汽轮机和储能模型
图2中,Pmo和Peso分别为汽轮机输出功率和储能充电功率的指令值。在图2中,汽轮机控制路径的Kp、Kd系数一般取0.1和20,这是因为后者和传统一次调频的意义相似,而一次调频的对应系数为20或25。前者则通过PID参数调整过程,综合超调幅度、振荡时间等确定为0.1。此外,在储能路径中,这两个参数都乘以了一个系数Kes,这个系数和储能容量相关。Kes越大,储能分担汽轮机调门波动的效果越好,提供低频振荡阻尼的效果越好,但相应的对储能容量要求也越高。隔直环节的Tw可取为1~5s,若Tw太小,则负荷波动引起的储能变化会很快消退,会影响储能分担汽轮机波动的效果,若Tw太大,则会导致储能在一个时段的平均出力不为0,引起持续的充电或放电,进而影响储能利用峰谷差价盈利。
2 新模式下的同步转矩和阻尼转矩
2.1 同步转矩和阻尼转矩
由图2可得,在进行小扰动分析时,汽轮机控制路径和储能控制路径的传递函数分别为


式中,GDP为死区环节。此外,储能环节Hes(s)依据文献[14]简化为一个时间常数很小的一阶惯性环节,即

除此之外,储能系统还应有相关限制,如储能的容量限制、充放电功率限制及逆变器的容量限制等。在分析小干扰稳定时可以不考虑这些。
文献[15]中分析得到,在小干扰稳定中,储能系统的有功控制主要通过直接影响发电机电磁功率来参与发电机有功/频率的调节。因此,结合储能的转子角控制器接入Heffron-Philips单机系统的简化线性化模型如图3所示。
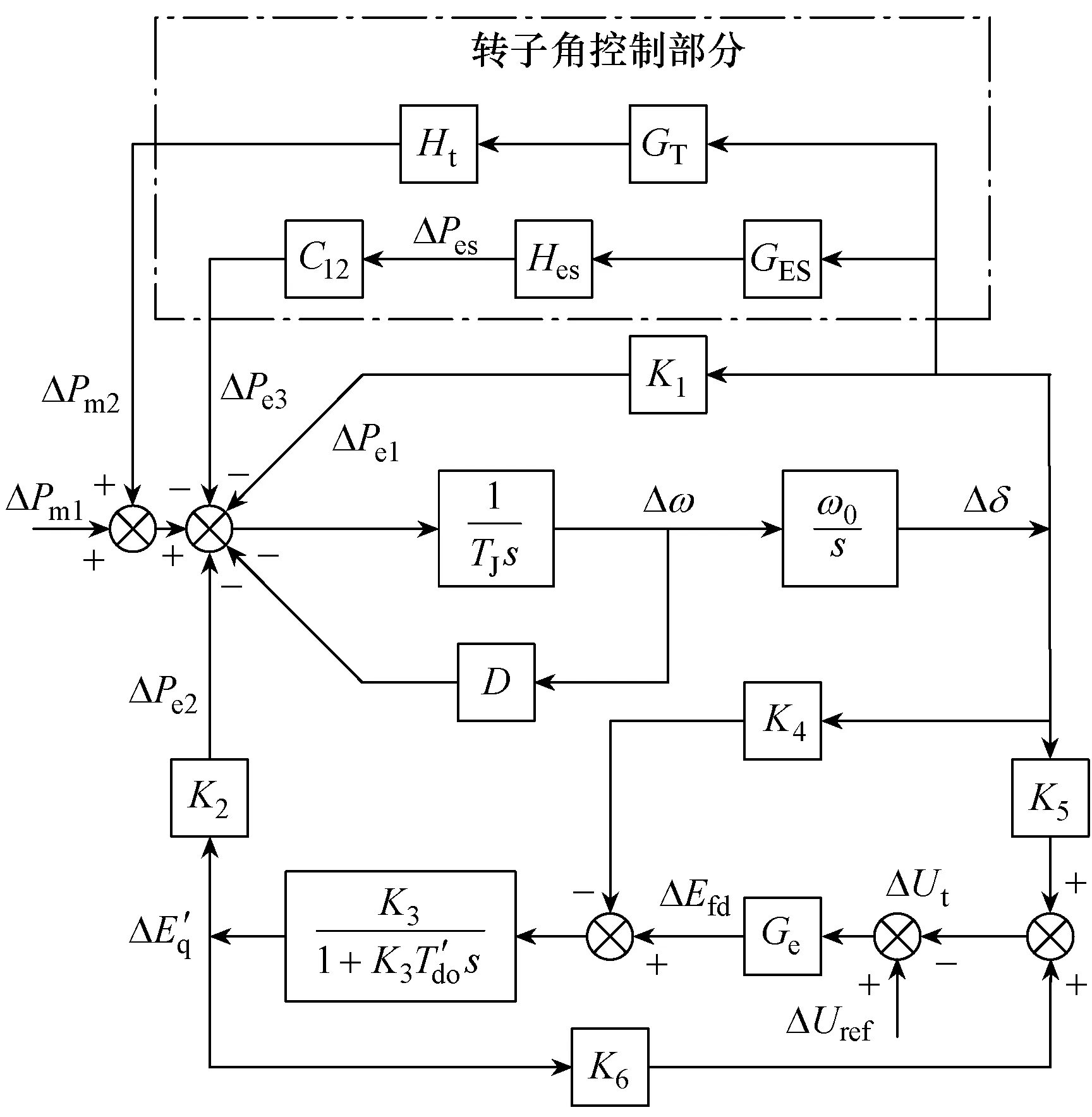
图3 控制器接入单机系统的简化线性化模型
其中,Heffron-Philips模型的各参数定义可以参考文献[16]。ΔPes为储能设备的充电功率变化量,参数C12为储能系统的充电功率转化为影响发电机电磁功率ΔPe3的系数,该系数与发电机及电网的参数有关。在单机系统中,当转子角偏离目标值时,储能设备可以通过充电或放电来改变有功分布,间接影响发电机的电磁功率,提供使角度回归的转矩。如果忽略有功损耗,可以近似认为储能设备提供的有功功率全部用于改变机组的电磁功率。
由于汽轮机控制路径增加了调门动作死区,同时取消了补偿环节,无法产生正确的阻尼力矩,而且一般不会考虑汽轮机的阻尼作用,所以计算同步转矩和阻尼转矩时,可以只考虑储能控制部分。
由于需要偏转的角度不多,所以补偿环节采用m=1的一阶超前模块,由图2可得储能控制路径产生电磁转矩的传递函数(Kes取1)为

将s=jωd(ωd为系统的某一个振荡频率)代入式(4)中,可得

其中
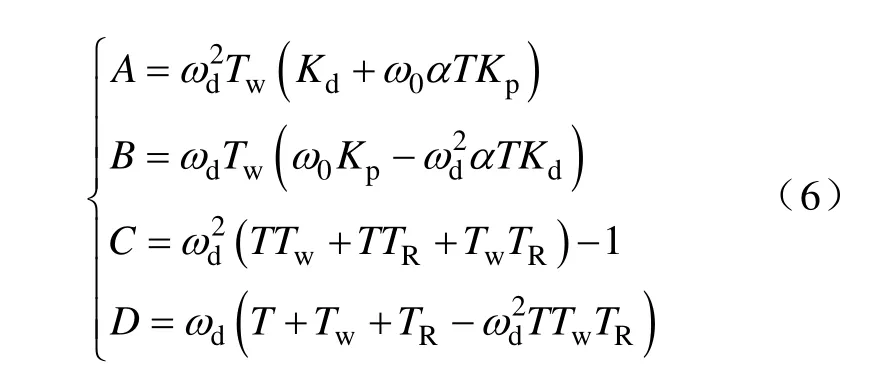
因为s=jωd,Δω=sΔδ/ω0,可将式(5)表示为
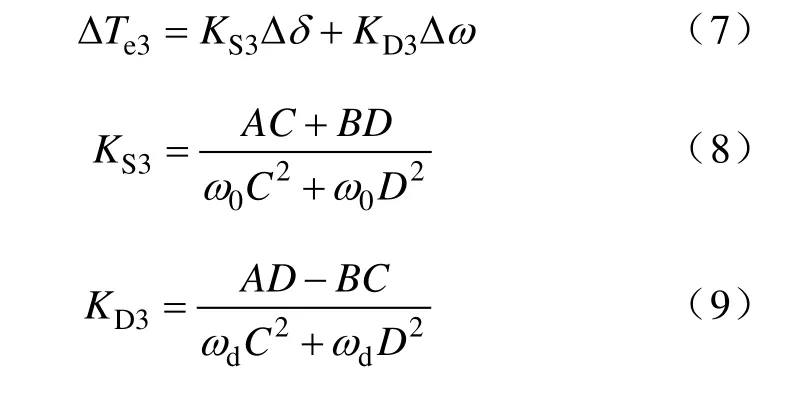
式(7)表明,储能产生的转矩可以分为两个部分,前者与Δδ成比例,为同步转矩,后者与Δω成比例,为阻尼转矩。其中,KS3和KD3分别为同步转矩系数和阻尼转矩系数。
2.2 补偿环节的设计
在储能系统提供电磁转矩的路径中存在两个环节,高通环节和储能环节,其中前者会导致相位领先,而后者导致相位滞后。在进行相位补偿时,需对两个环节产生的相位延迟总和进行补偿。
假设需要抑制的低频振荡频率为ωd。高通和储能偏转的相位和为esφ。然后可以求得超前环节的参数为
在实际设计补偿环节时,会发现需要补偿的角度和电力系统静态稳定器(power system stabilizer, PSS)相比小得多(在±10°内)。这主要是因为储能响应速度快,时间常数很小。而传统的PSS需要通过励磁器和励磁绕组间接发挥作用,这两者时间常数大,所以引起的转矩角度偏转大,需要补偿的角度就大。
进一步分析还会发现,尽管PSS可以通过角度补偿在指定频率得到最佳的效果,但是频率一旦偏离(无论是由于参数不准确或者运行状态变化,还是对系统中存在的其他振荡频率),补偿环节偏转后的力矩角度就会偏离期望值,阻尼转矩就会显著下降。若使用储能提供阻尼转矩,由于时间常数小,即使频率偏离计算频率,引起的角度偏差也不会太大,所以这种方式对各种工况变化或参数变化的适应性也更好。
2.3 阻尼比的影响
根据前述分析,由式(8)和式(9)可以对同一个频率范围计算同步和阻尼转矩系数,分别如图4和图5所示。
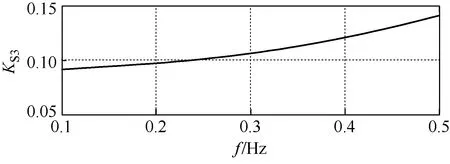
图4 储能控制器提供的同步转矩系数

图5 储能控制器提供的阻尼转矩系数
从图4和图5可以看出,利用储能转子角控制可以在0.1~0.5Hz范围内提供相对平坦的阻尼转矩。
此外,在得到单机系统总的同步转矩系数KS和阻尼转矩系数KD后,可计算阻尼比为

式中,TJ为发电机惯性时间常数。
根据图4可知,在0.1~0.5Hz频域中,转子角控制提供的同步转矩系数KS3都相对很小。由于同步电网会提供一个相对很大的KS,所以KS3对式(12)中的KS影响很小,故对阻尼比计算结果基本没有影响,即尽管新模式提供的同步转矩会降低低频振荡抑制效果,但是其影响微乎其微。
3 负荷跟踪的仿真验证
从前述分析可知,使用转子角控制抑制低频振荡时,提供阻尼的原理与类似研究[15]本质相同,差别主要在于转子角控制会提供额外的同步转矩(本质上是为了进行负荷跟踪)。由于这种额外的同步转矩基本不影响阻尼比,所以在扰动后,系统的动态行为会与其他利用储能抑制振荡的研究类似,为此,本文不再对扰动后的振荡和抑制效果进行仿真分析,主要对负荷跟踪过程中减少汽轮机动作的效果进行仿真。
3.1 负荷冲量扰动响应
图6所示为单机单负荷系统,发电机加装转子角控制器。初始状态下,发电机输出功率为0.549p.u.,与负荷保持平衡,转速为额定转速,储能输出功率为零。假设在t=5s时,负荷需求突然增加0.006p.u.,且持续时间为2s(这是一个ΔP×Δt= 0.012的单向负荷冲量)。仿真得到发电机转子转速、转子角、汽轮机输出指令和储能输出变化分别如图7所示。
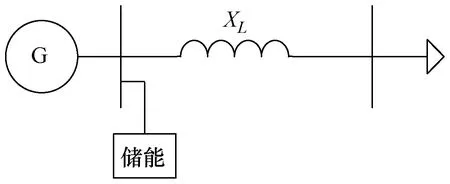
图6 单机单负荷系统
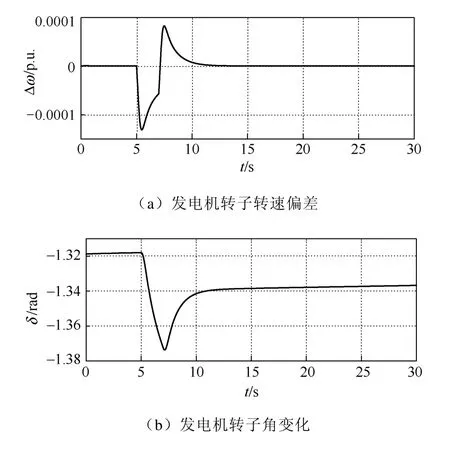

图7 单机单负荷系统模拟负荷冲量
从图7可以看出,负荷增加后,发电机转子角和转速都开始下降,随后转子角控制器给储能系统发出指令,增加储能输出,分担了发电机的负担,发电机转速和角度开始回归。2s后,负荷冲量结束,储能输出也随之消退。发电机的转速最终停留在额定转速。整个过程中,汽轮机路径的PD控制输出未越死区所以不会给汽轮机调门发出指令,汽轮机输出没有改变。
如果负荷变化没有在2s后消失,则储能的输出会因为隔直环节的作用而逐渐消退,此时发电机转子角继续变化,使汽轮机处的转子角控制发挥作用,汽轮机增发功率同样可以实现功率平衡和频率的自动恢复。这些动态过程已经在文献[1-3]中描述,在此不再赘述。
还可以对新模式和传统模式(一次调频模式)进行比较。首先,根据转子运动方程可知,如果汽轮机一次调频死区为2转,则仅当负荷冲量不大于ΔP×Δt=(2/3 000)×TJ=0.000 66TJ时才可以仅利用转子动能弥补有功缺额。只要负荷需求大于这一数值就会导致汽轮机转子转速超过死区,进而触发调门动作。而这一数值远小于前述仿真使用的负荷冲量大小。其次,即使负荷冲量较小,没有触发一次调频动作,所述扰动也会导致汽轮机在扰动后的转速不是额定转速(只有汽轮机转子改变速度,才能释放出能量)。由此可见,新模式可以有效减少汽轮机的调整次数,并提高电能质量。
3.2 长时间的负荷跟踪
和负荷冲量扰动相比,更有意义的是长时间负荷跟踪时的效果。为此,假设图6中负荷从t=60s开始按照0.007 5p.u./min的速率爬升,同时给负荷施加适当的白噪声来模拟实际负荷波动,进行仿真。图8为仿真得到的发电机转速(频率)偏差、汽轮机有功输出和储能有功输出变化。从图8中可以看出,发电机转速被时刻维持在额定频率附近,而且频差很小(最大频差不到0.005Hz)。此外,储能输出不断地在0值附近波动,汽轮机输出则表现出明显的分段变化,充分体现了储能减少汽轮机调整次数的效果。

图8 机组输出变化(转子角控制模式)
如果负荷持续增加或减少,则仅依靠隔直环节无法保证储能在调整过程中的充电/放电能量之和为零,导致储能的电能减少或增加。虽然这种调整偏差也是在削峰填谷,但其未必处于最优运行点。因此,控制和优化之间的协调工作还有待进一步探索。
作为比较,还可以假设图6中的发电机使用传统方式(仅配置一次调频和AGC)进行仿真,将得到的频率曲线图9和使用转子角控制模式得到的频率曲线图8进行比较。从图9中可以看出,一次调频模式频率波动幅度明显大得多,而且受制于AGC积分时间,长时间不能回到额定频率,而转子角控制总能很快自动回归额定频率。此外,图9中越频率死区(0.66×10-3p.u.)的时刻都会对应一次调频动作,调整次数显然比图8中调整次数多很多。
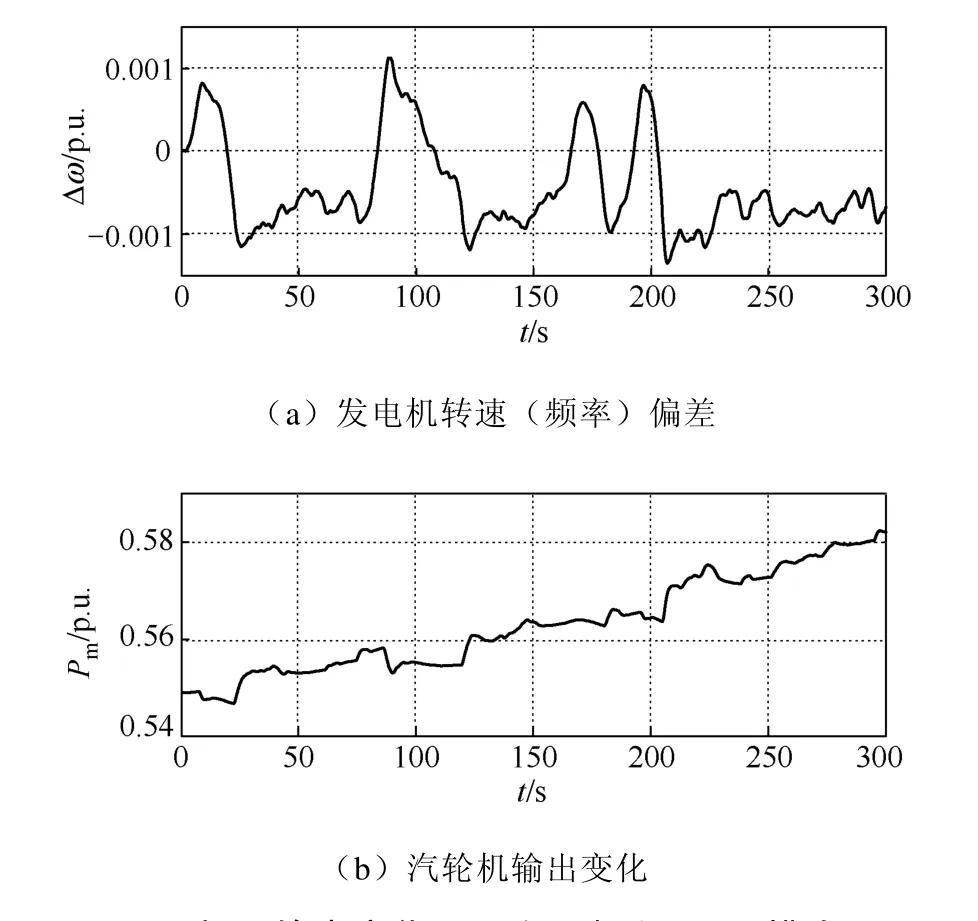
图9 机组输出变化(一次调频和AGC模式)
4 结论
如果在发电机出口安装储能装置,则可以通过改变储能输出间接影响发电机转子上的转矩,所以转子角控制的输出指令可以发给汽轮机和储能装置一起执行,前者负责自动的负荷跟踪,后者负责提供阻尼转矩和应对较小的负荷波动,避免汽轮机调门频繁调整。
分析表明,结合储能的发电机转子角控制会同时提供额外的同步转矩和阻尼转矩,其中阻尼转矩在相当宽的频率范围内变化不大,能够更好地适应多种工况。同步转矩会影响低频振荡抑制的效果(阻尼比),但影响相对较小,可以忽略不计。仿真结果表明,结合储能后,转子角控制可以自动跟踪负荷,实现无需调度和AGC干预的自动频率恢复,汽轮机调门动作次数比现有一次调频模式少。这种组合克服了过去转子角控制面临的主要问题,也使其广泛实施部署成为可能。
