大型民机进近着陆段异常能量风险判据
2021-07-07鲁志东张曙光戴闰志黄铭媛
鲁志东,张曙光,*,戴闰志,黄铭媛
1. 北京航空航天大学 交通科学与工程学院,北京 100191
2. 中国民航上海航空器适航审定中心,上海 200335
根据波音公司1959—2016年商用喷气飞机事故统计和国际航空运输协会(IATA)统计,进近着陆阶段是飞行事故率最高的阶段,大致占各阶段事故量的60%[1-2]。其中,飞行机组人员或自动驾驶功能对飞机能量的不当管理是造成进近着陆事故的主要原因之一,异常能量状态进一步诱发失控、重着陆、擦尾和超出跑道等事件或事故表现[3]。
尽管大型运输机可能具备较高的飞行自动化水平,可以提供迎角保护和高速保护等功能。但是,飞机在进近着陆段时,即使保护功能正常工作,依然存在因为处于异常能量状态而诱发事故的风险。尤其对于某些纵向控制律使用过载指令或者C*指令的电传操纵民机(如空客系列、C919等),其呈现出中立速度静稳定性,驾驶员无法直接通过操纵杆感知速度变化,更容易进入未察觉的异常能量状态[4]。同时,随着航空电子设备和驾驶舱自动化水平不断提升,飞行机组的功能角色可能进一步地从飞机操纵向系统监管过渡,对飞机能量状态的感知也进一步削弱,从而导致人工应急管理能力的下降[5]。
针对能量状态感知,对于应用侧杆操纵的电传民机如空客系列,其合格审定的专有条件中规定[6]:在明显低于正常运行速度时,飞机必须提供驾驶员足够的低能量状态信息告知。可见,进近着陆能量管理是大型飞机安全关注问题,自动化水平的提升为能量管理提供了可能。空客等侧杆操纵民机已将低能量状态保护作为一个安全关键功能。恰当预警以保护飞机,又不过于保守,是低能量保护的核心目标。
基于速度偏离、下滑道偏离和下降率参数是大型民机异常能量预警的主要依据。2000年,美国飞行安全基金会(FSF)针对大型民机提出稳定进近操纵建议,其中明确用速度、下滑道偏离和下降率作为安全监控参数[7],对民机进近自动设计和驾驶训练提供了原则性指导。
围绕异常能量预警判据的具体确定,陈俊平等从适航规章要求和其它行业文件中,分别提取低动能的速度判据和低势能的下滑道偏离判据,结合某支线客机提出改出低能量状态的方法[8]。
Shish等进一步提出基于高精度仿真模型进行在线预测,根据速度和高度参数为驾驶员提供飞机能量状态的感知和告警[9]。
Wang等则基于飞机运行的QAR数据通过仿真复现低能量场景,在此过程中以既定的速度偏离和下滑道偏离量作为异常能量判据[10]。
总体而言,按照CCAR-121部[11]运行的大型运输类民机的进近着陆程序较为规范,对于其的异常能量告警普遍基于标称剖面偏差和数据分析,根据设定的异常能量场景建立能量管理依据。其中数据来源,一类是高保真仿真模型,另一类是运行数据。与此相对应,通用航空飞机(依照CCAR-91部[12]或CCAR-135部[13]运行)也常遭遇异常能量问题,但其运行程序和参数的差异性较大。Puranik等基于大量通航飞机运行数据研究了多种能量状态指标,包括动能、势能、总能量及其变化率等,结果表明单一指标无法完全表征通航飞机在异常能量状态下的性能[14]。
尽管大型民机进近着陆过程的异常能量判定参数较为统一,但判据值的确定依赖于异常能量场景的定义。已有的文献给出的异常能量场景主要基于适航规章[8],基于经验[9]、或者直接基于运行数据而建立[10]。鉴于异常能量安全问题在飞机设计和合格审定中(特别对于侧杆电传操纵飞机)受到关注,本文在已有研究基础上,从大型民机进近着陆段可由异常能量诱发的事故统计数据入手,建立多种进近着陆安全风险场景,通过随机模拟方法研究异常能量状态对安全风险的影响规律,获得完整的风险参数谱,进而建立能够恰当预警以保护飞机而又不过保守的异常能量判据,作为飞行控制功能设计和驾驶训练的基础。
1 进近着陆异常能量状态及其风险分析
能量状态描述了飞机在任何给定时间可用的动能、势能和能量储备的多少[15]。根据IATA的飞行风险管理模式[2],由于外部条件(如突风)、人为因素(如操纵失误)或者潜在风险(如控制器设计不当)导致飞行处于异常能量将引起不利飞行状态,如果没有及时被抑制或改出,将可能导致飞行风险事件甚至事故。
IATA给出进近着陆阶段与不利飞行状态相关的主要事故按发生频率排序为:冲出跑道(23%)、重着陆(14%)、失控(7.5%)和擦尾(5.5%) 等[2],整理后如表1所示。

表1 特定进近着陆事故中不利飞行状态分类
上述不利飞行状态分类中,失速、垂直速度偏离、异常速度、不稳定进近、不当着陆过程、不受控下沉等都与飞行过程中能量状态管理不当有关;未及时复飞属于决策性失误,本质上也是能量管理不当(不及时);其它,侧向速度偏离和异常姿态,与其它操纵有关,本文不纳入考虑。此外,复飞失败也与异常能量有关。进近阶段的异常能量状态,特别是低速度和低推力状态可能使得飞机在开始复飞后高度损失过大、达不到预期爬升梯度甚至引发失控[16-17]。
由此,本文从降低上述5种进近着陆事故(事件)风险着手,探讨异常能量状态的影响。对上述进近着陆事故(事件)的判定归纳如下:
1) 失控:不经意进入失速是失控重要诱因,也是飞机处于低能量时必须考虑的失控条件之一[18]。从机制而言,失速完全由迎角所决定,失速速度则是表现形式。1g失速速度需要在飞机合格审定中验证。
2) 重着陆:FAA飞行手册FAA-H8083-3B指出,运输类飞机触地瞬时下降率大于340 ft/min(1.7 m/s) 时可认为发生重着陆[19]。出现重着陆,往往和初始下降率过大或者拉平过晚有关[20]。
3) 擦尾:拉平过程中最大俯仰角大于擦尾角,则发生擦尾,擦尾角取决于具体机型。飞机速度过低或拉平不及时而强行拉起,容易导致擦尾[21]。
4) 冲出跑道:当飞机完全停止所需着陆距离大于降落机场跑道长度时,可认为飞机冲出跑道。除了着陆滑跑减速措施不充分,接地速度大是导致冲出跑道的重要原因之一[22]。
5) 复飞失败: CCAR 25 R4第25.119条和第25.121条规定双发飞机复飞定常爬升梯度不低于3.2%;单发失效时不小于2.1%[23]。另一方面,着陆复飞高度为50 ft(15 m)且飞机带有一定俯仰角,高度损失也是复飞过程的重要制约。当实施复飞操纵时,未达到所需爬升梯度或高度损失过大,即视为复飞失败。
下面将制定进近着陆标称飞行任务及其对应能量状态基准,结合示例飞机仿真,探讨任务参数偏离呈现的异常能量状态引发上述风险的规律。
2 飞机进近着陆仿真
2.1 飞机参数与标称任务剖面
本文以某双发单通道客机作为示例。飞机基本参数和进近着陆风险事件的判定参数见表2。
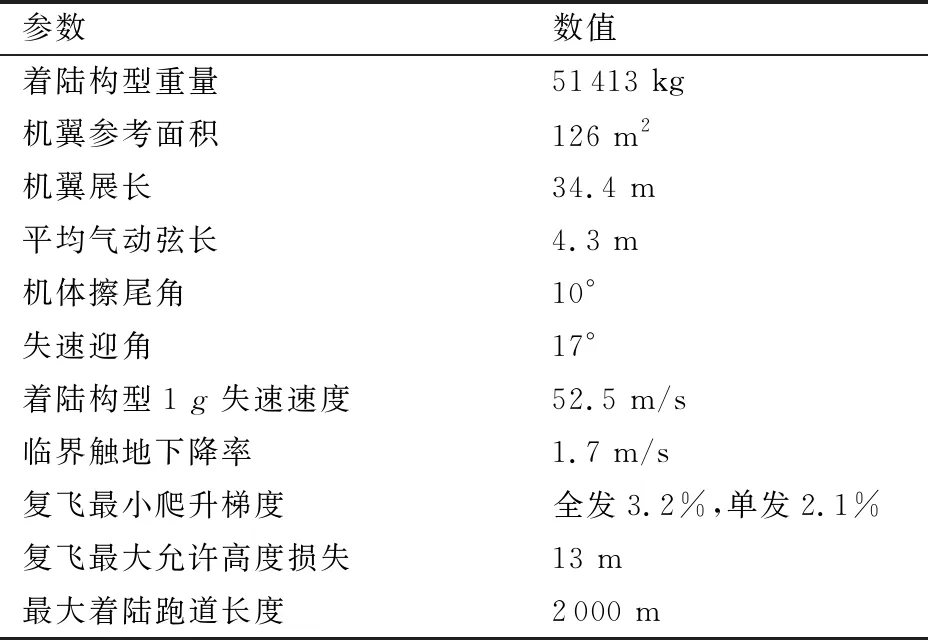
表2 飞机基本参数和进近着陆风险事件判定参数
鉴于运行管制和高安全性要求,大型民机进近着陆程序比较规范。本文只考虑仪表进近着陆的最后进近和着陆航段[24],根据相关规范和手册[24-25]建立进近着陆标称任务如图1。
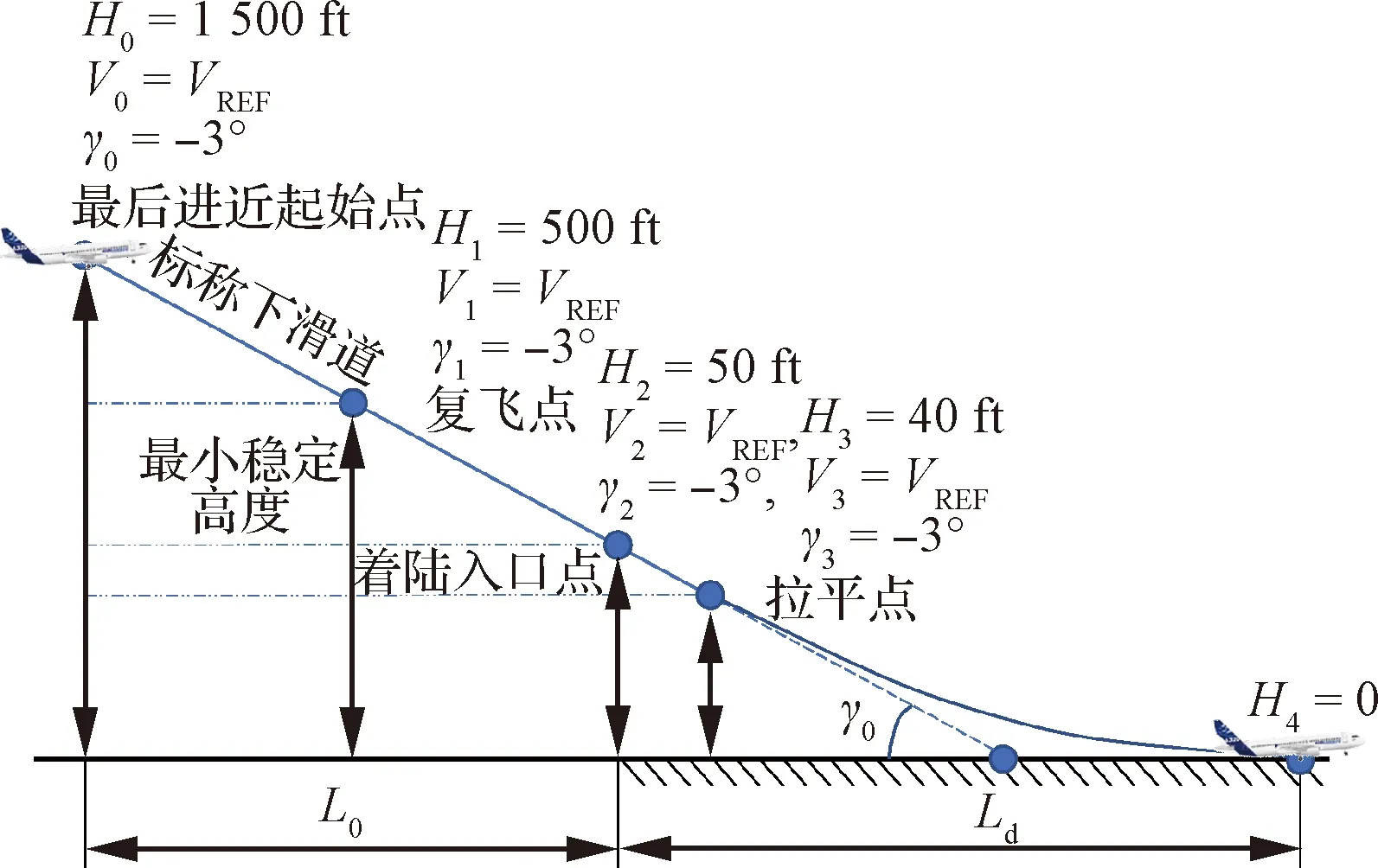
图1 标称进近着陆任务剖面图
1) 飞机在H0=450 m(1 500 ft)高度定直平飞。
2) 到达最后进近航段起始点后,飞机从平飞状态转入γ0=-3°下滑道。
3) 在最小稳定高度H1=150 m(500 ft)之前建立着陆构型,将速度稳定在VREF(实际为指示空速,仿真中为当量空速,全文同;对于地速另行注明)。
4) 飞过着陆入口点下降至拉平高度H3=12 m(40 ft) 时开始拉平,并缓慢将油门置于慢车位,数秒内飞机下降率减小至0~1 m/s,飞机触地后仿真结束。最后进近起始点到着陆入口距离为L0,着陆入口到触地点距离为Ld。在本文分析中,假定飞机触地后进入匀减速滑跑,根据统计取着陆平均加速度为-3 m/s2 [26]。
如果进近过程中飞机到达最小稳定高度H1之前未建立稳定下滑状态则转入复飞程序。根据相关规范和手册[24-25]制定标称复飞任务如下:
1) 同进近着陆任务1、2。
2) 在到达最小稳定高度H1时决定复飞,平稳迅速地推油门至复飞位,同时拉杆调整飞机姿态,使飞机转入爬升。
2.2 进近着陆和复飞飞行控制
进近着陆阶段,需要精确控制飞行航迹和速度。为了避免驾驶技术的影响,并且易于实现大样本随机仿真,本文设计“较为优化”的控制方案操纵飞机。进近飞行为基于总能量的航迹角和速度控制逻辑[27],末端用自动拉平耦合器[28]。
飞机总能量ET包含动能和势能:
(1)
对式(1)微分并认为航迹角γ很小,则有
(2)

(3)
通过油门调节总能量,用俯仰操纵调节动能和势能间的分配[29],为
(4)

(5)
并进一步地通过超前校正环节和PI控制器将下降率指令转化为俯仰角指令:
(6)
式中:G1(s)为相位超前校正环节;KP1和KI1分别为下降率误差的比例和积分控制增益。俯仰角控制器在俯仰阻尼内回路基础上通过比例增益KP2和超前调节环节G2(s)实现指令跟踪,具体为
δec=G2(s)KP2(θc-θ)-Kqq
(7)
基于以上分析,建立飞行能量控制系统如图2所示。为抑制总能量控制器切换到拉平耦合器过程中的瞬态,设计俯仰角指令淡化器[30]:
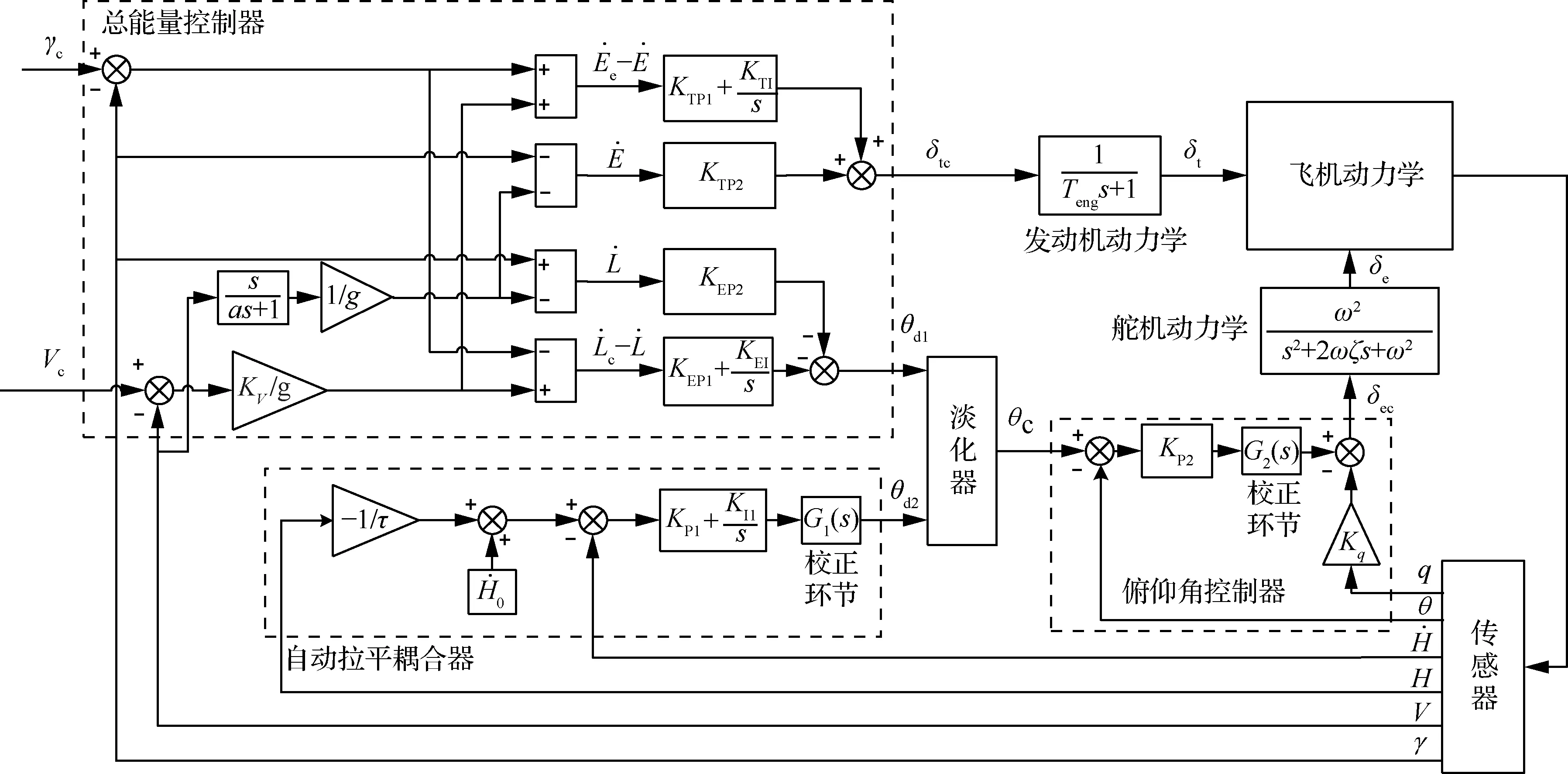
图2 能量控制系统结构
(8)
式中:Td为淡化时间常数;θd1和θd2分别为总能量控制器和自动拉平耦合器输出的俯仰角指令。
由于突风影响不能忽略,这里对于能量问题引入低空纵向离散突风模型[31]。
复飞过程中断开总能量控制器,进行油门和俯仰操纵:
(9)
θc=
(10)
式中:tGA为复飞开始时刻,δT.VREF表示进近速度稳定所需油门量;δT.GA表示复飞油门量;θ0为复飞初始俯仰角;θGA为复飞爬升俯仰角。俯仰角指令在ΔT时间内从θ0线性增加至θGA以模拟拉起过程。在标称复飞任务中,取θGA=12°,ΔT=8 s,δT.GA为最大油门量。
示例飞机执行标称进近着陆任务和复飞任务的仿真结果如图3所示。标称进近着陆参数为:L0=8 593 m,Ld=422 m;拉平最大俯仰角为5.67°, 触地瞬时下降率为0.5 m/s;着陆距离Le=1 192 m,作为对照,着陆重量54 000 kg的空客A320飞机在海平面干跑道、无风且无发动机反推时的需用着陆距离为1 260 m[25],二者接近。
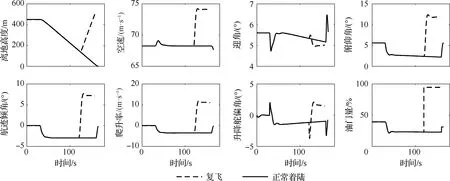
图3 标称进近着陆任务仿真
标称复飞参数为:初始高度损失ΔH=6.3 m,进入爬升状态后速度增加至74 m/s并保持稳定,航迹角为7°,定常爬升梯度CGs为12.28%。
2.3 进近着陆偏离仿真
根据第1节,进近着陆偏离标称过程呈现异常能量,可能导致不利飞行状态,从而引发安全风险。标称进近着陆任务剖面的关键特征点包括最后进近起始点、复飞点、着陆入口点和拉平点,选取关键特征参数为起始位置L0、稳定进近速度V1和拉平高度H3,其他参数偏离(如下滑道偏离)可以等效成上述参数的影响。另外必须考虑风速影响;同时飞机着陆质量变化将影响失速速度,具有全局性。由此,根据飞机运行可能出现的偏离,定义任务偏离参数及其范围如表3所示。
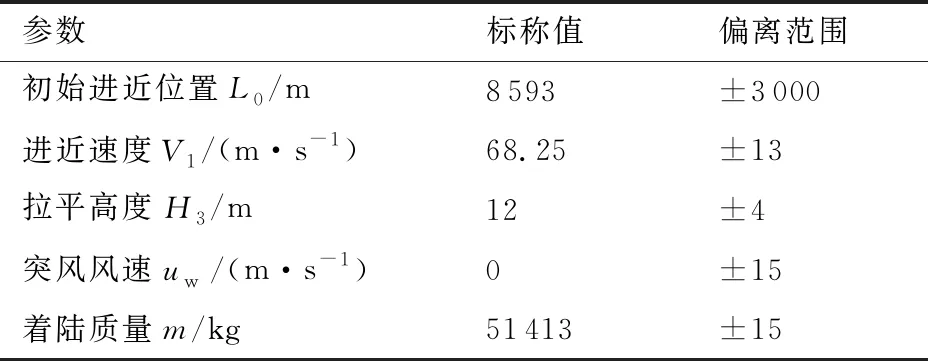
表3 着陆仿真任务偏离参数及范围
使用Sobol采样方法[32]对上述偏离参数进行随机采样,得到400组偏离参数组合,如图4所示。相比伪随机数采样、拉丁超立方采样等方法,Sobol采样可以在多维概率空间中产生更均匀的分布[33],如图4中主对角线柱状图所示。
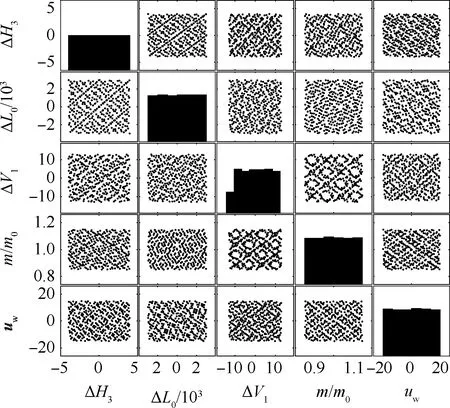
图4 着陆任务偏离参数采样
分别在每组偏离参数组合下进行进近着陆仿真,飞行轨迹如图5。其中,除了2次仿真中飞机发生失速,其余情况飞机都降落在跑道上。
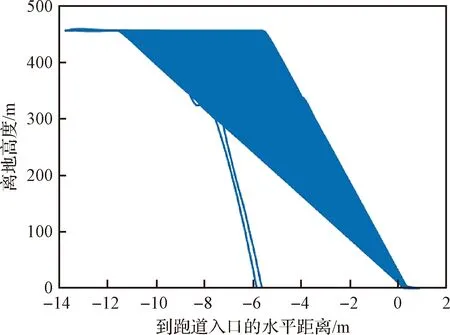
图5 进近着陆任务随机仿真轨迹

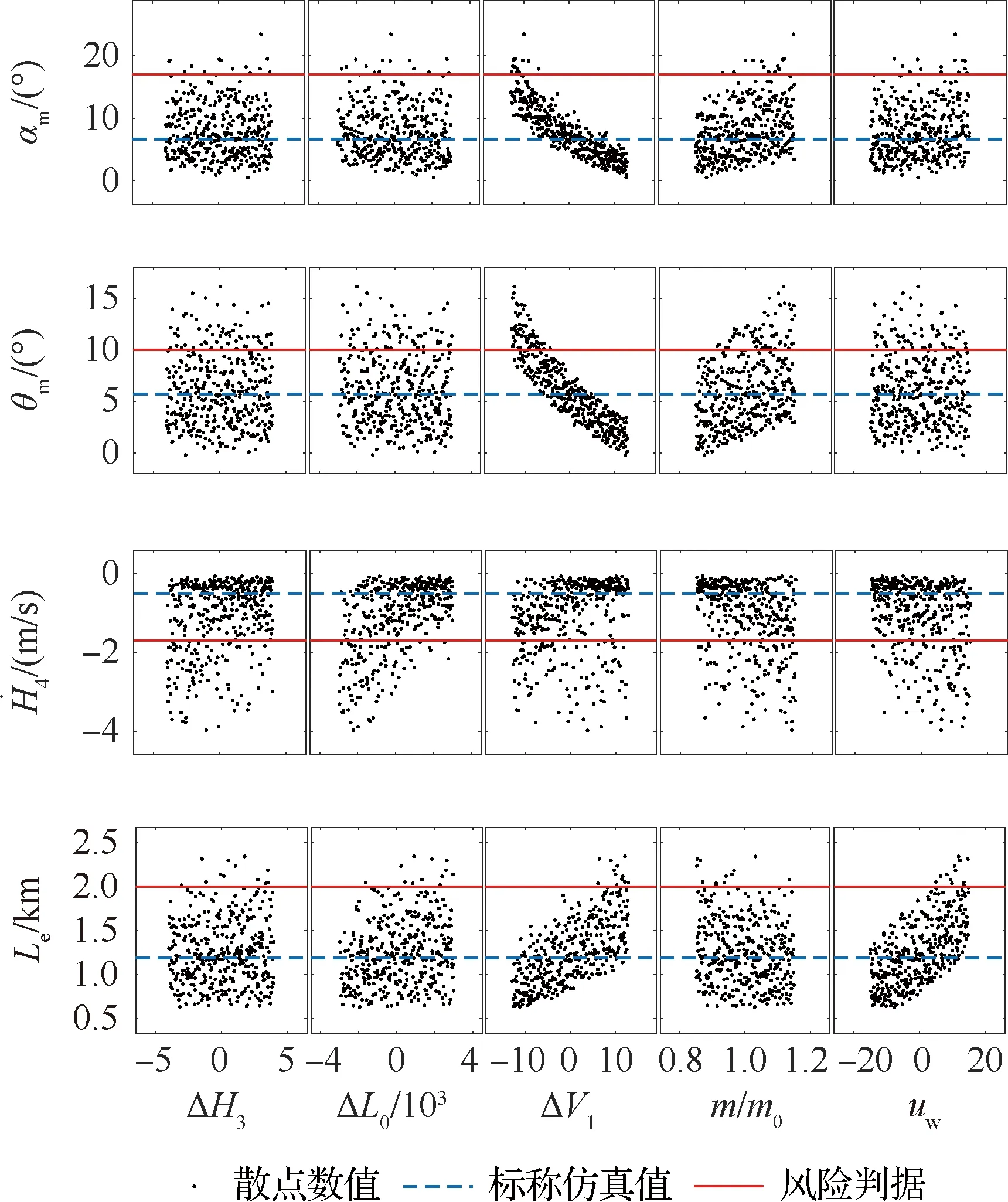
图6 着陆特征参数随机仿真结果
基于仿真数据统计四类着陆风险事件发生频率如表4所示。
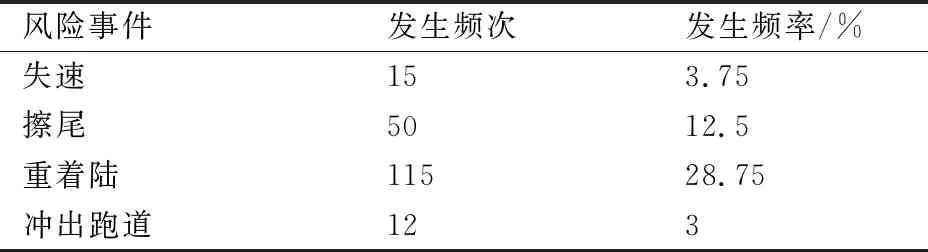
表4 着陆仿真中风险事件发生频率
由于在着陆风险事件中,能量指示参数之间不是孤立的,引入相关性分析方法研究进近着陆任务偏离参数与着陆风险参数之间关系。
相关系数R用于量度2个变量之间的线性相关程度[34]。以拉平最大俯仰角θm和进近速度V1为例,其相关系数为
RθmV1=
(11)
式中:μ和E均表示数学期望。
对于多变量系统,为了在分析两个变量相关性时排除其它参数的影响,可采用偏相关系数。对于k个变量x1,x2,…,xk,任意两个变量xi,xj之间的g阶(g≤k-2)偏相关系数可由多个g-1阶偏相关系数递推得出(逐次增加控制变量数)[35]:
Rij.l1l2…lg=
(12)
例如,θm和V1散点数据的4阶偏相关系数可由3阶偏相关系数得到
RθmV1.L0H3uwm=
(13)
相关系数/偏相关系数的取值范围为[-1,1],正负号表达了两组数据之间的正、负相关性。当其绝对值小于0.3时,可认为2组数据呈弱相关。
对于前述仿真结果,排除异常仿真数据后,分别计算4种着陆安全性特征参数与所有偏离参数两两间的相关系数和偏相关系数值,结果如图7所示。根据计算结果,归纳参数偏离对进近风险事件的影响如表5所示。

表5 参数偏离对着陆风险的影响程度
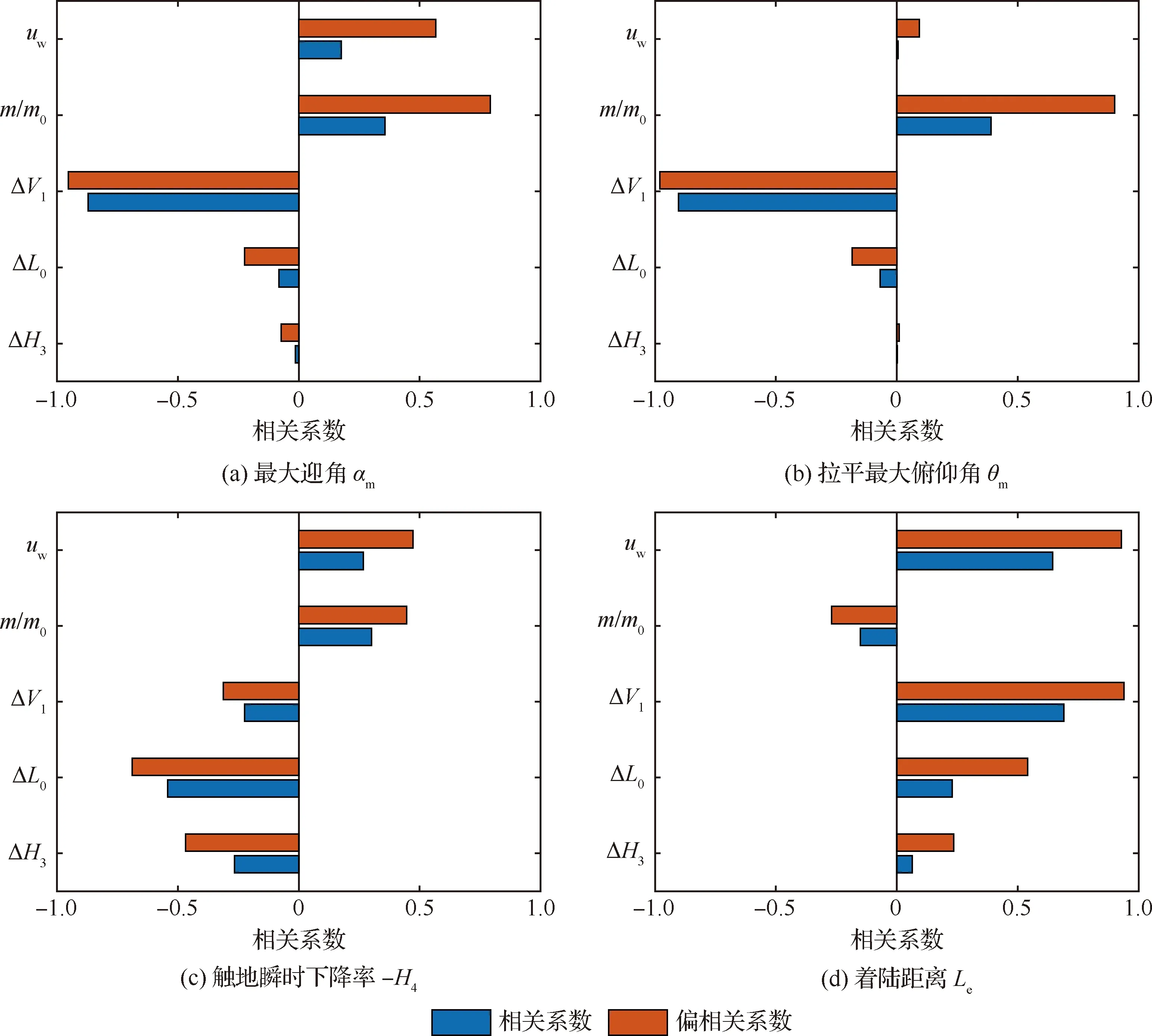
图7 着陆特征参数与偏离参数的相关关系
根据仿真分析,失速风险参数(最大迎角)与进近速度呈现最强的负相关性。如果进近速度偏低,为维持平衡趋于增大迎角,是导致失速风险的重要因素。风速和重量偏离与最大迎角的偏相关性很高,较高着陆重量或者顺风将增加失速风险。
擦尾风险参数(拉平最大俯仰角)与进近速度呈现强负相关性,与重量偏离有强偏相关性,因而本质上也受重量因素的强影响。进近速度偏低、着陆重量较高都导致俯仰角增大,增加擦尾风险。
重着陆参数(触地下沉率)与多个偏离参数相关,但没有相对明显的主导关系。当进近初始位置距着陆入口偏近,或者拉平较晚、位置偏低,若保持预定接地窗口,则触地瞬时下降率增大,增加重着陆风险。较慢的进近速度容易导致拉平不足,也会增大触地瞬时下沉率。着陆重量高,或遭遇顺风,都会增大重着陆风险。
进近速度增大,或者遭遇顺风,导致飞机接地地速增加,如果不考虑额外的地面滑跑制动措施,必然增加冲出跑道风险。当初始进近位置距着陆入口偏远时,下滑道变缓、拉平时间变长,导致接地点到着陆入口距离一般也会增大(除非调整下滑角)。另外,本文只考虑了重量对空中段着陆距离的影响而未考虑其对地面滑跑距离的影响,因而重量对着陆距离的实际影响可能不同。
由此可见,若不计人为因素而仅仅分析客观的飞行状态参数对着陆安全性的影响,得到的上述仿真结果与表1的飞机运行事故统计结果具有一致的趋势。另外,相对于相关系数,偏相关系数可更准确地揭示飞行参数与风险之间内在关系。
2.4 复飞过程偏离仿真
在图1所示标称任务剖面中,复飞关键特征点包括最后进近起始点和复飞点。对于影响复飞安全性的参数选取,前一阶段同于着陆剖面即进近起始位置L0、进近速度V1,假设复飞窗口固定(类似于着陆分析中取不变的接地窗口),则最重要的复飞参数是复飞油门δT.GA。由此定义复飞偏离参数及其范围如表6所示,其中一并考虑风速和着陆重量变化。
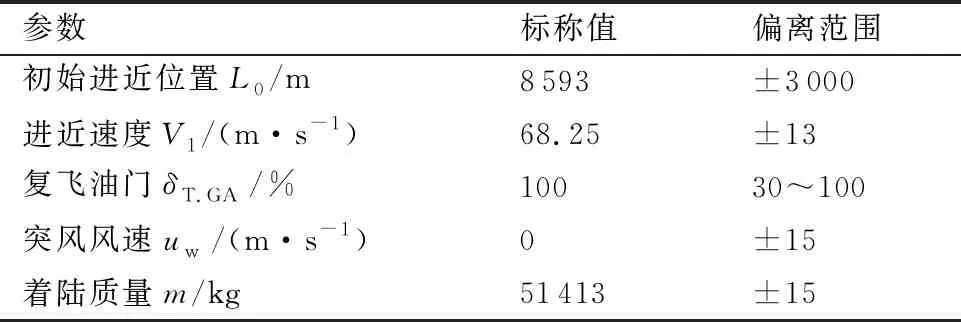
表6 复飞仿真偏离参数及范围
同前,使用Sobol采样方法得到400组偏离参数组合如图8所示。在每组偏离参数组合下分别进行复飞仿真,所有仿真中的竖直平面内飞行轨迹如图9所示。统计每一次复飞仿真中复飞开始后的高度损失ΔH和接近定常状态后的爬升梯度CGs,得到这两项复飞性能特征参数随机仿真结果如图10所示。分别计算两项复飞安全性特征参数与所有飞行偏离参数的相关系数/偏相关系数,结果如图11所示。偏相关数据给出,复飞高度损失量受初始进近位置偏离、进近速度、风速和复飞油门影响很大。初始进近位置偏近则下滑道趋于变陡,进近速度偏大,或者复飞油门不够,或者遭遇顺风,复飞拉起高度损失都会变大,超过一定阈值会发生触地风险。飞机变重会影响剩余推力,也增加高度损失。复飞达到定常爬升状态后的爬升梯度和剩余推力直接相关,因而受飞机重量和复飞油门量影响最大。
图8 复飞偏离参数随机采样
图9 复飞随机仿真飞行轨迹
图10 复飞特征参数随机仿真结果
图11 复飞特征参数与偏离参数相关关系
3 能量状态安全边界与预警策略
3.1 能量状态安全边界
第2节根据进近着陆和复飞标称剖面,提炼导致进近着陆风险事件的重要特征参数,包括初始进近位置、进近速度、拉平高度等着陆安全关键参数,以及初始进近位置、进近速度、复飞油门、复飞高度等复飞安全关键参数,并综合飞机质量变化、风速等因素,建立其相互关系。对于这些参数的进一步分析如下:
1) 进近位置主要通过改变稳定下滑角从而影响着陆安全性,因而可将其等效成下滑角表征飞行状态参数,易于进行能量状态管理。
2) 拉平高度、复飞高度等是安全关键参数,但不是状态指征参数,适当确定后作为能量状态管理的基础。如拉平高度不低于标称值40 ft(1 ft=30.48 cm) 时基本不影响着陆风险。
3) 飞机实际重量将影响参考速度VREF,能量状态管理将基于VREF考虑。
4) 飞行状态基于空速建立,因而风速主要影响地速以及接地安全性,特别顺风影响较大。
5) 复飞油门是直接改变能量状态的手段,因而作为能量状态管理参数。
因此,飞机能量状态安全边界基于拉平高度和复飞高度等任务参数,按照空速V和下滑角γ建立,并考虑复飞油门δT.GA和风速uw影响。
进一步地,基于随机仿真结果建立能量状态安全边界。例如,假设复飞油门量δT.GA=100%、风速uw=0,设置400组飞机能量状态(V,γ)的随机组合,分别进行进近着陆任务和复飞任务的仿真,得到能量状态与进近着陆风险的对应关系如图12(a)所示,其中不同标记点表示飞机发生不同类型风险,而黑色线包围成的能量状态区域表示飞机在此状态下不发生任何风险,因而可将其作为能量状态安全边界。在此基础上,分别考虑0、5和10 m/s的顺风风速,得到能量状态安全边界如图12(b)所示,黑线表示安全边界,红框表示预警边界;而当复飞油门量分别为100%、75%和50%时,得到能量状态安全边界如图12(c)所示,黑线表示安全边界,红框表示预警边界。可知,飞机遭遇顺风增大或者复飞油门量减小时,能量状态安全边界范围会缩小。
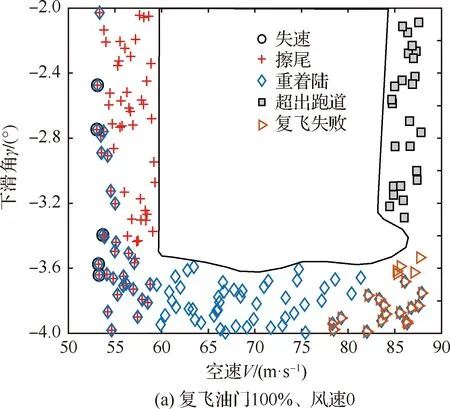
图12 能量状态安全边界
3.2 异常能量状态告警策略
进近着陆阶段驾驶员工作负荷大、进入异常能量状态后可用操纵改出时间短,应尽量减轻驾驶员负荷,在进入异常能量状态前及时发出预警以规避多种进近着陆风险。
为了实现方便,对图12的(V,γ)能量状态安全边界围成的不规则区域进行矩形近似得到能量状态预警边界如图中红框所示。以其中图12(a)的能量状态预警边界为例,简化后表示为
如此,基于仿真得到多组复飞油门量和顺风速度下的能量状态预警边界值如表7所示。
由表7进一步得到示例飞机的能量预警边界为超出上述范围的能量状态可视为异常。

表7 不同复飞油门和风速下的能量预警边界
对比文献[8]提出的异常能量判据包括低动能判据和低势能判据,可表示为
式中:V+1.3g表示能产生1.3g稳态法向过载的最小速度,对于本文示例飞机约为59 m/s。是ILS系统中实际下滑道相对基准下滑道的偏离量的度量单位,可取1 dot≈0.35°[8]。
文献[10]提出的异常能量判据,包括异常动能和异常势能判据,为
式中:kts为速度单位节。
此外文献[7]提出稳定进近应满足:“指示空速不小于VREF而不大于VREF+20 kts”, “ILS进近下滑道偏离不超过1 dot”以及“下沉率不超过1 000 ft/min”等,可表示为
分别将上述4种异常能量预警判据记为判据A、B、C和D。对于本文示例飞机,基于标称进近着陆任务剖面,按照表8生成400组随机偏离参数,分别进行着陆任务和复飞任务的仿真。
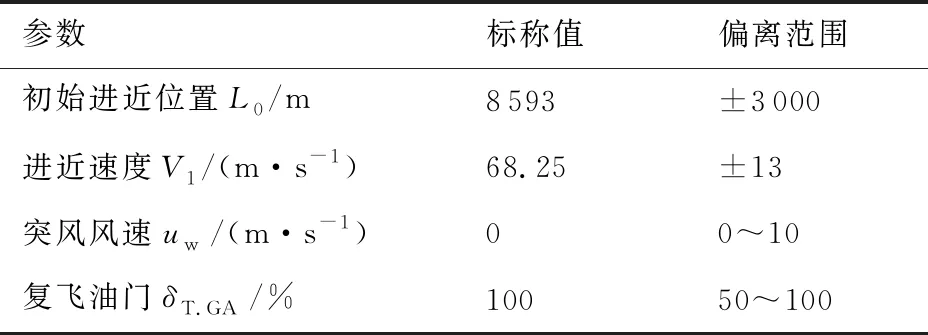
表8 进近着陆任务偏离参数及范围
记录所有仿真中4种异常能量预警判据的判定结果以及实际仿真中是否发生任一种进近着陆风险,定义异常能量判据的判准率为所有判断为正常能量状态的仿真次数中实际无风险的仿真次数所占比例,误判率为所有实际无风险仿真次数中判断为异常能量状态的仿真次数所占比例。结果如表9所示。
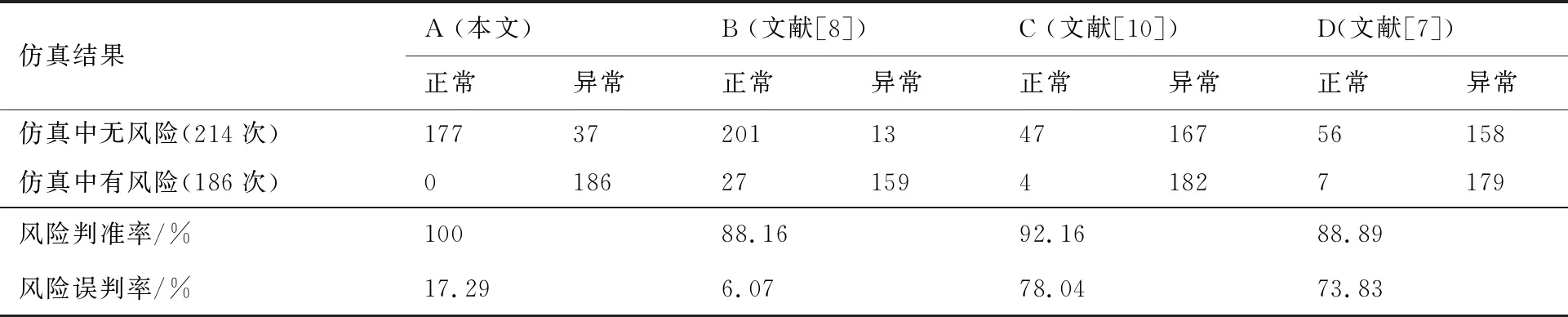
表9 异常能量预警判据的评价
对比4种判据可知,本文判据A对于进近着陆风险的判准率达到100%,由于对能量安全边界进行了矩形近似,所以在临近边界的结果中出现部分异常能量报警而实际无风险的情况,此源于边界简化的问题可以通过边界设置而解决(应用中一般需要留余量)。相对而言,基于全面的风险场景分析得到的判据A,准确度优于其他判据,而且风速以及复飞油门储备的影响不能忽略。总之,本文所得异常能量预警判据具有满意的判断准确度,而且不保守。
4 结 论
1) 基于风险事故(事件)统计数据对飞机进近着陆阶段异常能量状态诱发风险的分析表明,异常能量主要引起失速、重着陆、擦尾、冲出跑道及复飞失败等风险。本文随机仿真可揭示异常能量状态与风险的内在联系和分布规律。
2) 建立的基于仿真的异常能量判据形成方法,对于按照规范程序运行的大型民机具有较普遍适用性。
3) 顺风条件对进近着陆性能有重要影响,在能量预警中应考虑风速。在能够获得风速信息时可提高风险预警准确性。
4)复飞能力储备是进近着陆过程不容忽视的因素。在能量预警中考虑复飞油门储备,有助于进一步规避安全风险。
对于自动化程度越来越高的大型民机,本文建立异常能量判据的方法可以作为安全保护功能实施的基础。另外,仿真的准确度对于预测效果影响很大。现在民机研发中,一般将伴随着飞行试验过程不断校准飞行仿真模型,通过迭代可提高预测准确度。
