高分多模卫星控制分系统设计及在轨验证
2021-07-03吕高见关宏田科丰傅秀涛姚宁
吕高见 关宏 田科丰 傅秀涛 姚宁
(北京控制工程研究所,北京 100094)
高分多模卫星(GFDM-1)是我国首颗分辨率优于0.5 m同时具有多种敏捷成像模式的民用光学遥感卫星,也是国内首颗具备姿态机动自主任务规划的卫星。卫星采用降交点地方时为10:30 Am的太阳同步回归轨道,轨道倾角97.96°,与以往同类卫星相比[1-4],GFDM-1卫星对控制分系统姿态测量精度、姿态确定精度、卫星姿态控制精度、寿命、质量、可靠性和地面验证方面都提出了更高的要求,尤其是卫星的机动能力,较以往遥感卫星有大幅度提高。为了满足任务要求,控制分系统通过新研中大型控制力矩陀螺、大量程三浮陀螺、甚高精度星敏感器、高稳定度太阳帆板驱动机构、一体化磁力矩器、基于1553B总线体系的“中心控制单元+驱动控制单元”控制器等核心产品,并采用高精度姿态控制方案,实现了卫星在轨高精度高稳定度运行;控制分系统采用基于二级总线的轻小型化体系结构,实现控制分系统减重,并使卫星具备良好的系统扩展性;设计星上姿态机动自主任务规划方案,使卫星具备星上自主姿态规划和姿态机动;采用硬件冗余和系统重构方案实现控制分系统8年长寿命设计,并对关键单机开展寿命验证。
本文在对GFDM-1卫星控制分系统的组成、工作模式等方面进行简单介绍的基础上,重点对卫星控制分系统基于二级总线的轻小型化体系结构、高精度高稳定度姿态控制技术、敏捷机动姿态轨迹规划技术、长寿命高可靠设计等方面进行论述。根据卫星在轨运行数据,给出了控制分系统单机和系统性能指标在轨验证情况。
1 控制系统简介
1.1 分系统主要功能和性能指标要求
GFDM-1卫星相比以往遥感卫星,三轴姿态测量精度、指向精度、偏流角修正精度要求有较大提高。在机动方面,中型敏捷卫星强调卫星的快速机动能力,卫星在机动的快速性、机动模式的多样性和复杂性方面均相比以往卫星有质的突破。主要性能指标:被动成像模式下,三轴惯性姿态测量精度优于0.001°(3σ);主动成像模式下,三轴惯性姿态测量精度优于0.02°(3σ)。绕任意轴欧拉角最大角加速度1.2(°)/s2,最大角速度4.5(°)/s;典型的机动指标为0~5°/10 s,10°/15 s,25°/20 s,40°/25 s;在轨寿命8年;分系统质量为293 kg。
1.2 系统组成
根据卫星功能和性能指标要求,控制分系统由姿态敏感器、执行机构和控制器3部分组成。控制分系统组成框图如图1所示。

图1 控制分系统组成框图Fig.1 Architecture/Configuration of GNC sub-system
姿态敏感器包括:甚高精度有源像元传感器(APS)星敏感器、三浮陀螺、光纤陀螺、一体化红外地球敏感器、太阳敏感器。执行机构包括:控制力矩陀螺、一体化磁力矩器、帆板驱动机构、推进子系统。控制器包括:中心控制单元、驱动控制单元。
1.3 主要工作模式
为满足任务要求,GFDM-1卫星控制分系统的工作模式包括:主动段模式、入轨段控制模式、正常对地运行模式、点对点姿态机动模式、姿态/角速度预置模式、偏置飞行模式、匀地速非沿迹跟踪模式、匀角速度匀积分时间跟踪模式、测试与标定模式、轨控模式、全姿态捕获模式、无控模式、凝视模式、惯性定向模式等多个模式。其中正常飞行模式是卫星的长期运行模式,引入偏流角修正,姿态任务接收与规划模式处于待命状态,在卫星收到姿态机动任务后,卫星通过对目标点进行姿态规划并自主执行,进入姿态机动模式(点对点姿态机动模式或者姿态/角速度预置模式),并在成像任务开始前进入目标模式(偏置飞行模式、匀地速非沿迹跟踪模式、匀角速度匀积分时间跟踪模式、凝视模式、惯性定向模式)。卫星有轨控任务时,卫星通过绕俯仰轴或者滚动轴进行大角度姿态机动,机动至轨控姿态后,卫星自主进入轨控模式。卫星姿态失稳或卫星接收到整星能源安全报警后,卫星进入全姿态捕获模式。各模式之间设计有进入和退出条件,星上可自主或根据地面指令进行模式切换。各个模式的姿态确定和姿态控制方式均有所不同,下面对正常飞行模式、姿态机动相关模式等主要工作模式进行简单介绍。
(1)正常飞行模式采用陀螺预估加星敏感器修正的方案进行姿态确定。在陀螺故障时设计有星敏无陀螺姿态确定方案。姿态采用CMG的高稳定度控制算法,磁力矩器提供卸载力矩,必要时采用喷气保护。根据太阳信息,控制高稳定太阳翼驱动机构转动,实现太阳翼对日;同时对待执行任务进行姿态规划,并进行数传天线、中继天线的控制指向计算。
(2)姿态机动相关模式是在卫星接收到成像任务或者天线控制任务后,进行相应的姿态机动时,经历的一系列模式转换并实现任务所需要的姿态。在姿态机动过程中,使用陀螺数据对星体姿态进行预估,根据姿态机动轨迹规划结果,在机动结束时,将星敏的姿态信息引入,进行姿态修正。在成像任务、数传天线任务或者中继天线任务时,建立偏置飞行模式、匀地速非沿迹跟踪模式、匀角速度匀积分时间跟踪模式、凝视模式、惯性定向模式等,实现卫星的成像、数据传输等任务。姿态机动及稳态控制过程中,系统使用CMG进行高精度、敏捷机动姿态控制。同时,根据轨道角速度,控制高稳定太阳翼驱动机构转动,保证任务执行结束回对地姿态后,太阳翼处于对日状态。
2 技术特点
2.1 基于二级总线的轻小型化体系结构
为满足轻质量约束,并满足系统的可扩展性,GFDM-1卫星控制分系统采用基于内部1553B总线的结构形式和通用单机模块化设计思想[5-8],控制分系统的体系结构如图1所示。中心控制单元通过内部1553B总线与驱动控制单元、甚高精度APS星敏感器、三浮陀螺、一体化红外、控制力矩陀螺和帆板驱动机构进行通信,实现与各主要部件之间的信息交互;通过RS422串口实现与光纤陀螺、数字太阳敏感器等通讯,完成光纤陀螺、太阳等姿态测量敏感器数据采集;驱动控制单元作为辅助控制器,负责完各部件加断电控制和磁力矩器、推进子系统等单机的数据采集和控制。同时为了提高分系统电源的可靠性,将集中供电改为分散供电,具体见图2。
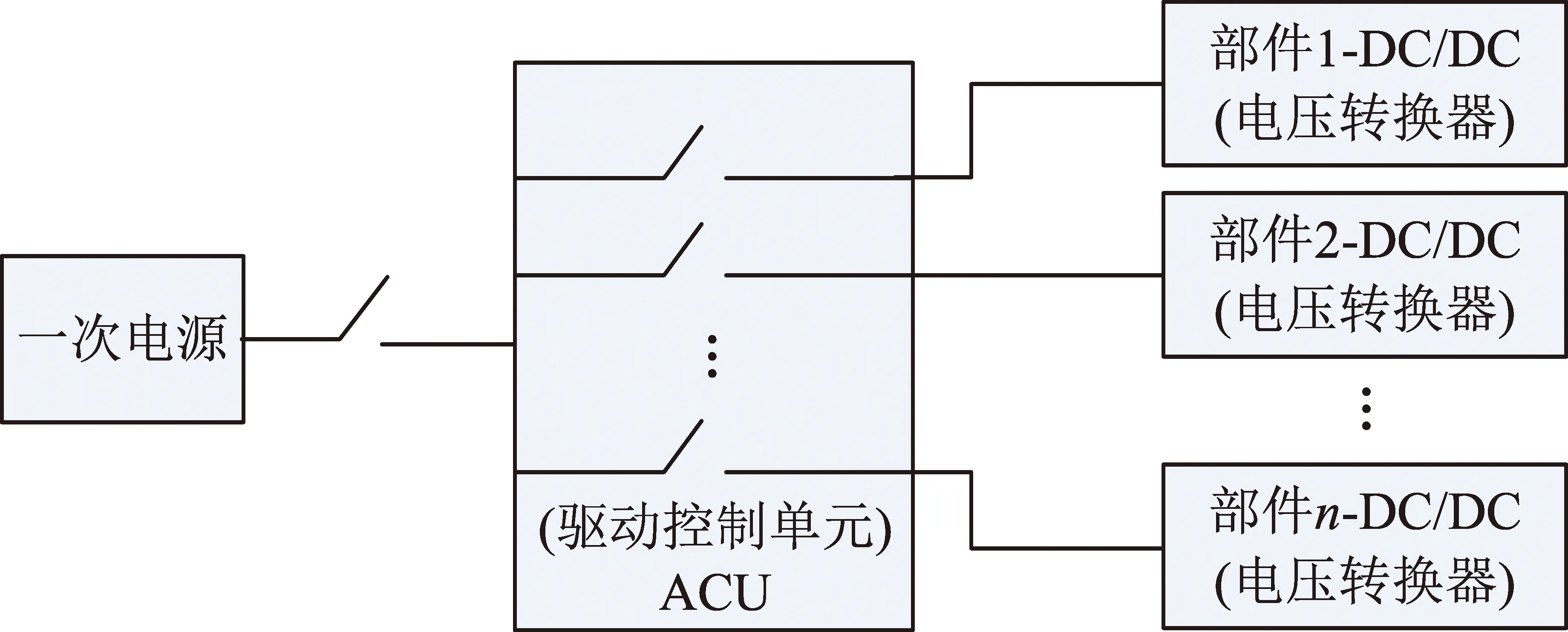
图2 控制分系统电源拓扑图Fig.2 Power resource topology of GNC sub-system
2.2 高精度高稳定度姿态控制技术
为保证GFDM-1卫星具有稳定姿态测量基准,卫星将3个甚高精度星敏感器与相机一体化安装,同时,通过对星敏感器温控进行专项设计,使星敏感器温度控制点的温度控制在±1 ℃以内,在星敏感器布局、结构形变控制、热控方面保证星敏感器拥有优异的测量环境,同时,在控制方案上还采用了甚高精度星敏感器标定方法,并根据星敏感器测量误差的高低频噪声特点设计星敏感器滤波参数,实现卫星在轨高精度姿态测量。
卫星刚体模型为
(1)

为满足整星敏捷机动的要求,控制分系统采用5个控制力矩陀螺绕星体Z轴的圆锥面均匀分布。为规避控制力矩陀螺的控制力矩奇异,在框架角速度指令精确解算的基础上,引入零运动规律和鲁棒奇异规避操纵规律。当在一定框架角下,各CMG的输出力矩共面,则控制力矩陀螺群的控制作用局限于该面(即输出合力矩在此平面内),丧失三维控制能力,此时称控制力矩陀螺陷入框架构型奇异状态(CMG奇异点)。CMG奇异点可分为隐奇点和显奇点两种,其中隐奇点附近可以在不影响合角动量变化下调整框架构型(框架重构型),脱离奇异状态,因此不产生附加的合陀螺力矩;对于显奇异,调整框架构型必然引起合角动量的变化,从而对星体产生力矩。由隐奇异点的特点可知,在根据期望控制力矩计算基础上引入框架角零运动规律,使得框架构型远离奇异点。显奇异的规避主要采用鲁棒奇异规避方法,即根据奇异度量大小调整框架角,使得框架构型绕开显奇异点,但星体的运动姿态与期望(规划)轨迹有差异。当卫星处于稳态状态时,采用磁力矩器进行角动量卸载,从而保证卫星稳态时不处于奇异点附近。


图3 正常模式下控制效果Fig.3 Performance of normal-mode attitude control

图4 机动模式下控制效果Fig.4 Performance of maneuver-mode attitude control
2.3 敏捷机动姿态轨迹规划技术
2.3.1 点对点机动姿态轨迹规划
根据卫星的机动能力,若采用Bang-Bang轨迹控制时,可以满足卫星的机动指标。但从有效载荷角度来看,卫星机动到位后还需要达到一定的稳定度,才能正常工作。由于卫星装有两个大型太阳翼,在机动过程中需要避免太阳翼挠性模态振动。因此,在进行点对点机动时,卫星采用基于角加速度正弦的轨迹规划方法来保证卫星机动过程中的平稳性。
正弦轨迹规划算法中,姿态机动的变速段和匀速段时长可写为
(2)
式中:tacc为变速段时长;tsli为滑行段时长;χ为机动目标角;ωcmg和αcmg为卫星的角速度和角加速度。

图5 角加速度正弦轨迹规划Fig.5 Trajectory planning based onsine angular acceleration
2.3.2 主动推扫机动姿态轨迹规划
GFDM-1卫星在扫描成像机动模式中,要求卫星建立一个恒定的扫描角速度(<2 °/s),并保证在该速度下的速度稳定度为0.002 (°)/s(3σ)。
在进行姿态和角速度预置时,系统采用基于末端平滑的7阶多项式规划来对卫星三轴欧拉角进行规划。多项式曲线规划用途广泛,理论上适用于从任意初始姿态、姿态角速度到任意末姿态、姿态角速度,且机动过程时间已知的情况。
(3)
滚动φ、俯仰θ、偏航ψ方向算法相同。规划结果如图6所示。

图6 主动跟踪姿态角规划Fig.6 Active attitude trajectory planning
2.4 长寿命高可靠设计
GFDM-1卫星作为寿命8年的低轨遥感卫星,为保证完成卫星长寿命设计考核,控制分系统从单机和系统两个层面开展分系统的可靠性设计。
单机层面。分系统从降额设计、抗力学设计、热设计、抗辐照设计、电磁兼容性设计、静电防护设计等方面对分系统全部单机开展设计和验证。特别是在抗辐照设计方面,采用高等级元器件和抗辐照加固方案,使所有单机均满足辐射设计余量。同时,研制过程中开展了星敏感器光学镜头抗辐照试验、摆动式帆板驱动机构加速寿命试验和一体化磁力矩器的加速寿命试验,试验结果表明各单机设计能满足卫星8年寿命要求。
分系统层面。对影响卫星寿命的关键单机进行了优化冗余设计,并开展全面验证,制定了完善的使用方案。对卫星姿态测量、姿态控制、卫星对日安全模式等均设计了多种系统重构方式,当部件发生故障时,系统自主完成重构,确保卫星稳定运行。特别是在安全对策中,利用晨昏轨道和卫星受到突出的重力梯度力矩的特点,化扰为稳,利用重力梯度力矩,设计了欠测量条件下燃耗少的安全对日方案,长期维持对日的燃料消耗极少,有利于卫星的能源安全保障。在信息流方面,分系统设计了软、硬同步两种方式和双总线方式,确保系统信息链路的高可靠。分系统的关键软件如控制计算机软件和星敏软件等,均设计了在轨维护功能,必要时,可通过地面注入程序,对星上软件进行维护。
3 在轨飞行验证情况
GFDM-1卫星自发射入轨后,控制分系统快速消除卫星太阳翼展开引入的干扰力矩以及数传天线、中继天线展开引起的大角度姿态偏差。在随后飞行过程中,新研的控制力矩陀螺、一体化磁力矩器、高稳定度太阳翼驱动机构、甚高精度星敏感器等单机相继顺利引入系统,完成了高精度星敏感器定姿下的正飞姿态、机动能力指标测试、匀地速机动成像、轨道控制等一系列飞行姿态的验证。GFDM-1卫星在轨姿态控制精度优于0.002°(3σ),姿态稳定度优于0.000 1 (°)/s(3σ),惯性空间测量精度优于0.001°(3σ);敏捷姿态机动指标满足整星的设计要求,控制分系统在轨功能正常,在轨指标均优于设计指标。
4 结论
根据GFDM-1卫星高精度、高稳定度、敏捷机动的要求,控制分系统根据整星的特点,在充分继承以往遥感卫星设计的基础上,采用基于1553B总线的轻小型体系结构,实现控制系统优化;同时针对高精度姿态控制要求,采用甚高精度星敏感器,实现了在轨的高精度定姿定位;针对机动模式采用不同方式的姿态规划算法,实现了卫星的敏捷姿态机动和高精度控制;通过设计姿态任务规划算法,实现卫星整轨自主姿态规划,在轨连续姿态机动;通过从单机和分系统层面开展可靠性设计和验证,使系统满足整星寿命要求。卫星在轨飞行对控制分系统的功能性能进行了充分测试,测试结果表明控制分系统功能正常,性能优于指标要求。
