高分多模卫星图像定位精度保证设计与验证
2021-07-02姜洋范立佳于龙江张国斌杨文涛
姜洋 范立佳 于龙江 张国斌 杨文涛
(中国空间技术研究院遥感卫星总体部,北京 100094)
卫星图像的精确定位是保证遥感卫星实现高精度对地观测任务的关键,是代表卫星性能和服务应用的重要技术指标之一。国外遥感卫星无控制点图像的平面定位精度达到10米量级,而美国在此方面的优势更为明显,已发射卫星无控制点平面定位精度达到5 m。我国的光学遥感卫星图像定位精度指标不断提升,2000年左右发射的遥感卫星,其定位精度在200米量级,2010年以后发射的高分二号等遥感卫星,定位精度达到50 m以内[1],其中测绘类卫星定位精度更高一些,但与国外同期发射卫星相比仍有很大差距。综合考虑技术发展现状和精度差距,新一代中型敏捷遥感卫星公用平台项目确立了将图像定位精度指标提升至10 m(1σ)以内的研制目标,通过平台研制阶段实现各项技术攻关,并最终通过首发星高分多模卫星完成相关技术在轨全面验证,实现图像定位精度达到国内先进水平,支持未来卫星应用任务。
定位精度的实现涉及机电热多个方面,覆盖平台和有效载荷多项技术,且需要天地一体配合的系统来支撑,而敏捷遥感卫星除常规的长条带推扫成像模式外,具备同轨多点目标、条带拼幅、多角度、立体等复杂敏捷成像模式,给图像定位精度指标的实现带来了更多困难。在姿态频繁机动过程中,会出现星敏感器不可用或是频繁切换,以及导航天线遮挡的现象,引起定姿和定轨精度下降;引起外热流、内热流变化,使温度场变化,为卫星内外方位元素稳定性设计增加了复杂度,同时也给地面处理提出了更高的要求。
本文从新一代中型敏捷遥感卫星公用平台和高分多模卫星的研制出发,针对图像定位精度的影响因素进行分析,结合卫星工程实践给出指标分配,提出各项具体设计方案和开展的工作事项,并对各项指标的设计和验证情况进行说明,最后给出了影响定位精度的关键指标实现结果和图像定位精度的在轨验证情况。
1 定位精度影响因素分析
高分多模卫星承载的有效载荷为0.5 m/2.0 m的线阵推扫式相机,根据卫星摄影测量原理构建严密成像几何模型。严密成像几何模型实际上是图像坐标系和地球固定参考坐标系之间的转换关系[2]。以飞行方向为X方向,其图像定位的基本模型可表示为
(1)

在地面处理过程中,由于内外方位元素高度相关,为了避免过度参数化,内方位元素通常采用几何检校模型为综合指向角模型。依据相机安装误差、轨道测量误差、姿态误差等对几何定位精度的影响特性进行分析,线元素误差与角元素误差对几何定位精度的影响具有等效性,可将线元素误差等效成姿态角误差,从而采用偏置矩阵对影响无控制点定位精度的众多误差进行统一补偿[3],则几何定位模型转换成如下形式。
(2)

卫星图像无控定位涉及卫星平台、姿态轨道测量、相机几何参数标定及图像地面摄影测量处理等多个环节。结合以往遥感卫星研制经验和高分多模卫星的设计方案分析,影响遥感卫星图像定位精度的主要因素可以分解为时间精度、定轨精度、定姿精度、相机内方位元素稳定性和相机-星敏感器结构热稳定性等因素,同时定位精度作为星地一体化指标与地面处理精度密不可分[4],具体影响因素分解如图1所示。

图1 定位精度主要影响因素Fig.1 Main factors influencing positioning accuracy
2 定位精度指标体系
根据定位原理分析得出影响定位精度的主要因素,包括轨道确定、姿态测量、结构稳定性、内方位元素稳定性、时间同步和地面标定6个方面,构成天地一体的定位精度保证体系,采用文献[4-5]中的分析方法,量化分析每个方面因素对定位精度的影响。综合分析结果表明:时间同步精度影响相对较小,而其他因素对定位精度均有很大影响,尤其是姿态测量和结构稳定性,按照当前水平引起的定位精度合计达到几十米量级,因此,为保证高图像定位精度指标的实现,应重点开展定姿与定轨关键单机研制、相机与星敏感器结构稳定性设计,实现在敏捷状态下保持当前定轨精度,达到角秒级的定姿精度,保证相机和星敏感器之间的角秒级的稳定性。同时进一步提升时间同步精度、内方位元素稳定性等其他指标。此外,从星地一体的定位精度指标体系考虑,在卫星星上设计保证的同时,充分论证地面标定处理的方案,尤其是针对高分辨率、敏捷特性及热稳定误差规律等开展标定和处理技术研究,进一步提升定位精度。考虑卫星图像平面定位精度10 m的指标要求,并结合可行性论证分析的结果,将定位精度总体指标逐一分解到轨道确定、姿态测量、结构稳定性、内方位元素稳定性、时间同步和地面标定各影响因素,提出卫星分系统级、单机级及地面的各项指标,形成天地一体的定位精度指标体系。
3 定位精度保证设计与地面验证
从定位精度指标体系出发,对卫星研制过程中的轨道确定、姿态测量、时间同步和结构稳定性等设计开展技术攻关,对相机设计和地面处理技术完成可行性分析论证,制定了6个方面的设计和验证工作项目。其中包括:单机级的硬件设计、软件设计、结构设计、仿真分析、专项试验;分系统级的算法设计、仿真分析、热试验、测试、物理试验;系统级的整星测试、综合仿真等项目。
3.1 轨道确定
高分多模卫星相对于以往稳态对地成像卫星,姿态频繁机动会使导航天线接收星数减少,针对这一敏捷特性采用双天线的配置方案,设计了无遮挡双天线冷备份和遮挡情况下双天线组合的2种工作模式,改进了实时、事后定轨算法,新研制了小型化、模块化可配置的导航接收机。进行实时、事后定轨仿真分析,开展紧缩场、球面近场和外场试验验证,结果满足指标要求。紧缩场试验状态如图2所示,事后定轨仿真结果如图3所示。

图2 紧缩场试验状态Fig.2 Test condition of compact field
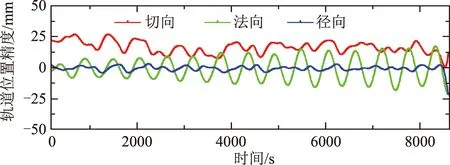
图3 精密定轨仿真结果Fig.3 Simulation results of precise orbit determination
3.2 姿态测量
针对高分多模卫星敏捷特性,新研制高动态甚高精度的星敏感器和大量程陀螺,采用两者联合滤波的高精度姿态确定方案和各敏捷模式的定姿切换策略,改进事后定姿的算法,对星敏感器低频误差和陀螺刻度因子等误差进行标定,从硬件和软件入手共同提高姿态确定精度。开展定姿算法数学仿真、星敏感器专项试验、事后定姿转台物理试验进行验证,结果表明:研制光轴测量精度1″的星敏感器并采用双星敏感器定姿结合改进算法,可以实现事后惯性空间姿态测量精度达到角秒量级,地面仿真验证结果如图4所示。
3.3 时间同步
采用整星、分系统、单机的多级时间同步机制,在硬件秒脉冲授时的基础上,在轨实时对单机内部时钟钟漂产生的时间偏移进行补偿,即采用高精度秒脉冲授时结合在轨实时补偿校时的高精度时统方案,重点提高秒脉冲输出精度及本地时钟计数精度。根据导航接收机、系统管理单元、控制分系统和相机的时统实测和分析结果,以及整星秒脉冲传输延时实测结果,综合分析整星时间同步精度优于20 μs。
3.4 结构稳定性
针对结构高稳定性要求,从传递路径入手开展包含材料、结构、热控、相机等多方面综合设计和分析,采用星敏感器-相机一体化的安装方案,研制高稳定性的载荷适配结构并在相机和平台之间增加柔性适配结构,进一步消除平台变形对相机的影响,采用精密热控措施,减小在轨热变形。
基于在轨典型工况开展全路径的热稳定性仿真分析(仿真状态如图5所示),完成了载荷适配结构、星敏感器支架重点部件的高稳定设计及试验验证,以及相机-星敏感器组合体结构稳定性试验验证。结果表明:热稳定性设计采取的技术手段合理可行,在一个标定周期内能够保证星敏感器与相机间连接支撑结构在轨稳定性优于2″,满足定位精度分配的星敏感器-相机结构热稳定性指标要求。

图5 结构热稳定性仿真分析Fig.5 Simulation analysis of structural thermal stability
3.5 相机内方位元素稳定性
从相机的光学系统、机械结构和热控多方面进行设计,论证实现内方位元素稳定性的措施和方案。针对重力场和温度环境两大主要因素对内方位元素影响进行分析,采用光机热集成分析方法对相机进行性能仿真。经分析,在温度水平附近波动±0.3 ℃的情况下,相机内方位元素的变化情况小于2个像元。进一步结合仿真分析结果,完成了相机高低温多种工况的热平衡试验,验证了热控设计正确且控温精度可以实现,预期内方位元素稳定性可以有效保证。相机热试验状态如图6所示。

图6 相机热试验状态Fig.6 Thermal test of camera
3.6 地面标定与处理
针对高分多模卫星的工作模式和对图像定位误差的影响因素特性,研究高精度的在轨内、外方位元素定标方法,探索外方位元素变化规律,对星敏感器-相机视轴夹角进行建模,提出了在轨时序化外方位元素定标方法求解外方位元素补偿参数;综合分析提出采用单次、周期性外定标、时序化定标的外方位定标相结合的定标方案;针对高分多模卫星的定标需求,开展不依赖检校场的内、外方位元素定标方案研究。联合多家单位开展论证工作,完成仿真分析和在轨数据试验验证,结果表明可以满足指标要求。
4 图像定位精度系统指标仿真及估算
采用姿态规划软件对被动成像工况进行仿真,输出姿态和轨道数据作为理论参考数据。将姿态轨道数据输入到GPS仿真器,再到接收机输出含伪距和载波的原始观测量,经过事后处理输出事后轨道测量数据;将姿态和轨道数据作为输入进行温度场仿真,输出典型时刻点的温度场分布情况并赋给星体结构的有限元模型,利用结构稳定性仿真模块进行变形分析,输出星敏感器、相机的安装面变化;将姿态、轨道信息、星敏感器安装面变化信息输入给定姿精度仿真模块,进行姿态确定输出3轴姿态;最后将姿态、轨道、相机安装面变化信息,结合相机参数、标定残差等代入到定位计算模型中,得到图像平面定位精度。仿真过程如图7所示。
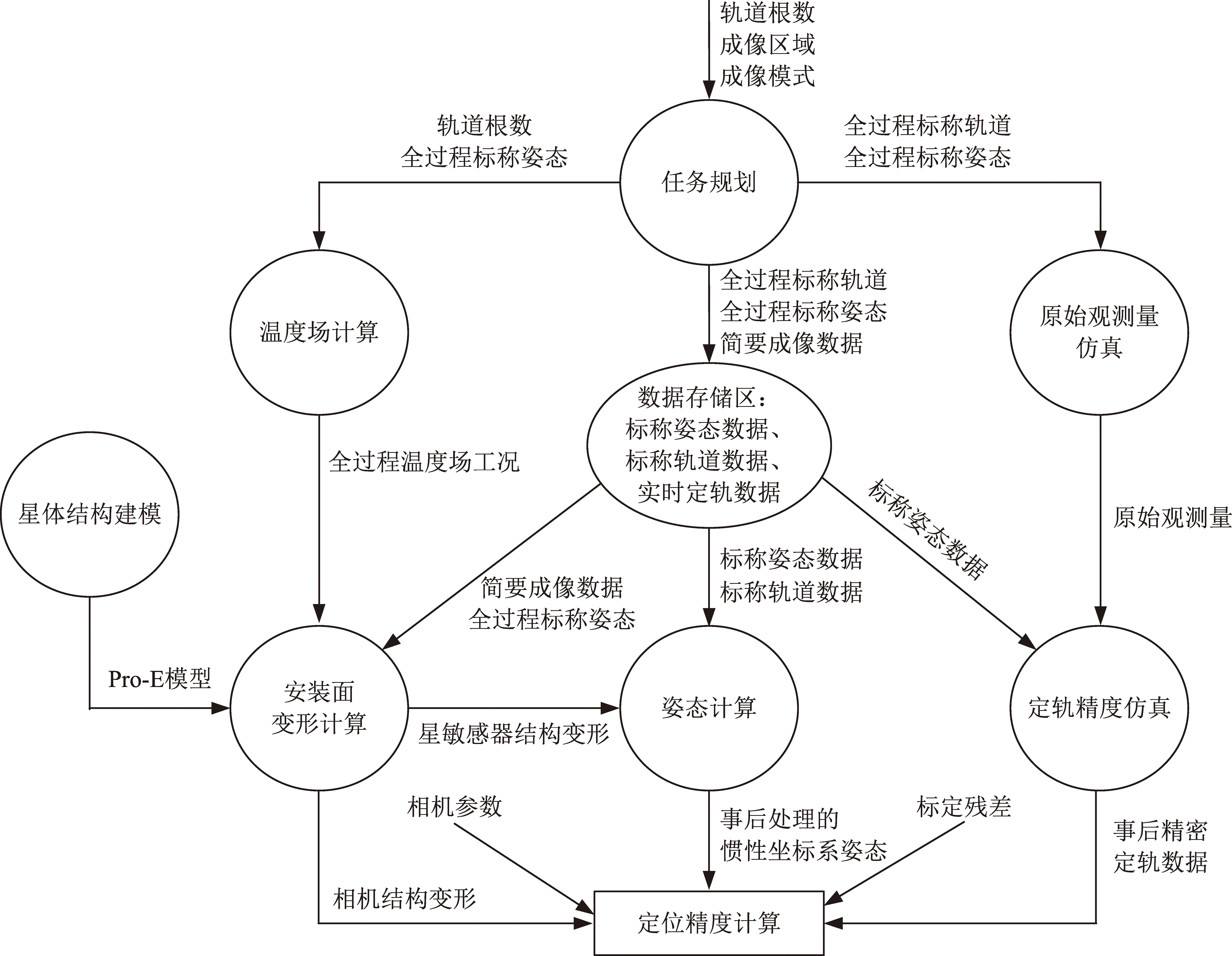
图7 定位精度集成仿真过程Fig.7 Process for integrated simulation of positioning accuracy
综上,考虑轨道确定、姿态测量、时间同步、结构稳定性、内方位元素稳定性和在轨标定6种主要影响因素,计算其引起的姿态测量误差、轨道测量误差、光学系统误差、地面处理误差,估算各项误差对图像定位精度的影响,按照上述指标体系初步估算定位精度优于9 m。
5 在轨验证情况
2020年7月3日,高分多模卫星由长征-4B运载火箭发射入轨,卫星平台各分系统工作稳定并分阶段开展了有效载荷在轨测试。基于卫星下传的平台服务数据和遥测数据进行分析,对在轨可直接或间接测量的影响定位精度关键因素的在轨状态实施评估。其中,轨道测量和姿态测量精度可以通过数据分析获得,其他影响因素在轨无法直接测量,可以间接定性分析或是通过图像质量整体进行评估。
5.1 轨道确定
利用下传的导航接收机原始观测量进行地面解算,获得事后精密定轨数据,对多个时段的数据进行统计分析,得到GPS模式下双天线事后定轨精度优于5 cm,分析结果如图8所示。

图8 GPS事后精密定轨精度Fig.8 Post precise orbit determination accuracy with GPS
5.2 姿态测量
采用7阶多项式拟合的方法对下传的星敏感器数据进行评估,经过不同时期多段数据采样统计分析可知,星敏感器光轴测量精度优于0.6″(3σ),通过多星敏感器星图融合方式,实现整星亚角秒惯性空间姿态测量精度,分析结果如图9所示。
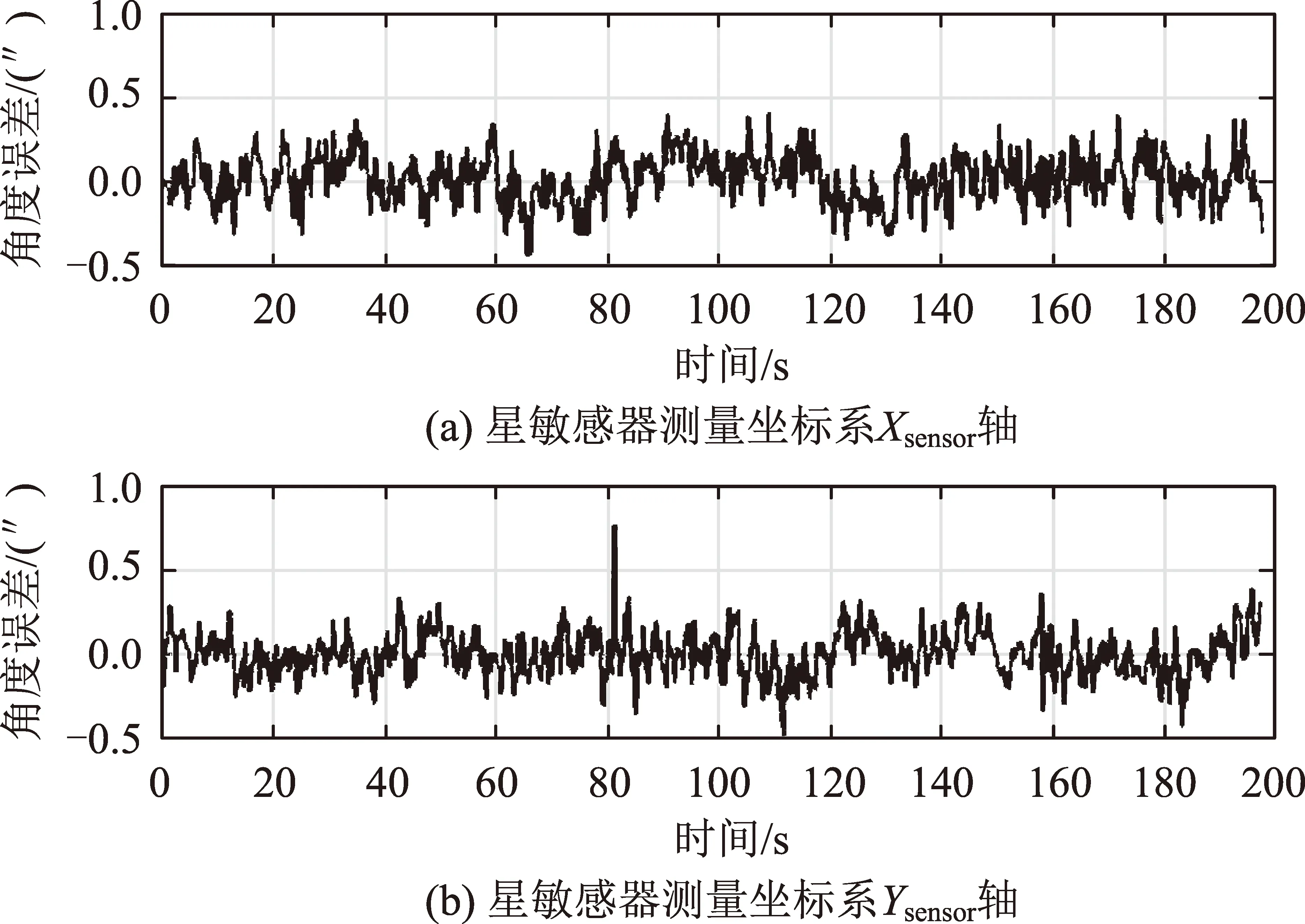
图9 融合星敏感器在轨精度分析Fig.9 Analysis of fused star sensor on-orbit accuracy
5.3 内、外方位元素稳定性
卫星入轨后,受当前地面图像数据处理方法的限制,难以对各误差因素进行独立识别和标定,主要通过图像定位精度随时间的变化情况对系统整体稳定性进行评估[6]。在轨的结构稳定性无法直接测量,可以通过分析星敏感器夹角变化,间接反映星敏感器结构和星敏感器的长周期稳定状态。采用连续多圈的星敏感器数据分析星敏感器的光轴夹角稳定性,统计得到夹角的波动量优于2.5″,且周期性和重复性规律一致,表明结构稳定性良好,具体如图10所示。

图10 在轨2个星敏感器之间夹角变化情况Fig.10 Angle changes between two star sensors on orbit
此外,结构稳定性、相机内方位元素稳定性和热控密切相关,对相机、星敏感器支架等部件的温度进行分析,可以间接评估稳定性的状态。对入轨飞行初期的22~90圈星敏感器和相机关键部位的温度进行分析,在星敏感器和相机结构路径上的关键部位,如前镜筒温度为19.2~19.4 ℃,3个星敏感器支架温度为20.1~20.3 ℃,主镜框周向、中心光栏温度在19.6~19.9 ℃,温度波动均在0.6 ℃以内,满足热稳定性的热控保证要求。
5.4 图像定位精度分析
高分多模卫星入轨状态建立以后,开展了点目标、拼幅、立体、多角度、主动推扫等多种模式成像测试,由中国卫星资源应用中心对图像进行定标和处理,对几何精度进行全面评估。利用高精度的数字化几何定标场,对内、外方位元素的系统误差进行标定,通过多次定标数据处理,消除周期性缓慢漂移误差,确保定位精度的稳定性;利用下传的星敏感器和陀螺的原始数据进行事后滤波处理获得精密姿态,利用下传的GPS原始观测量进行事后处理获得精密轨道,最后利用定位模型计算图像的定位精度。
中国卫星资源应用中心随机抽取高分多模卫星2021年1月内不同时相、多种敏捷成像模式下的91景图像数据,利用数字定标场数据进行图像几何定位精度评价,具体数据如图11所示。由图11可知:图像定位精度随姿态角变化较小,且在时间维度上没有出现规律性漂移,说明内、外方位元素稳定性较好,图像定位精度一致性较好。在星下点30°角范围内,图像无控定位精度优于5 m(1σ),优于10 m(1σ)设计指标要求。
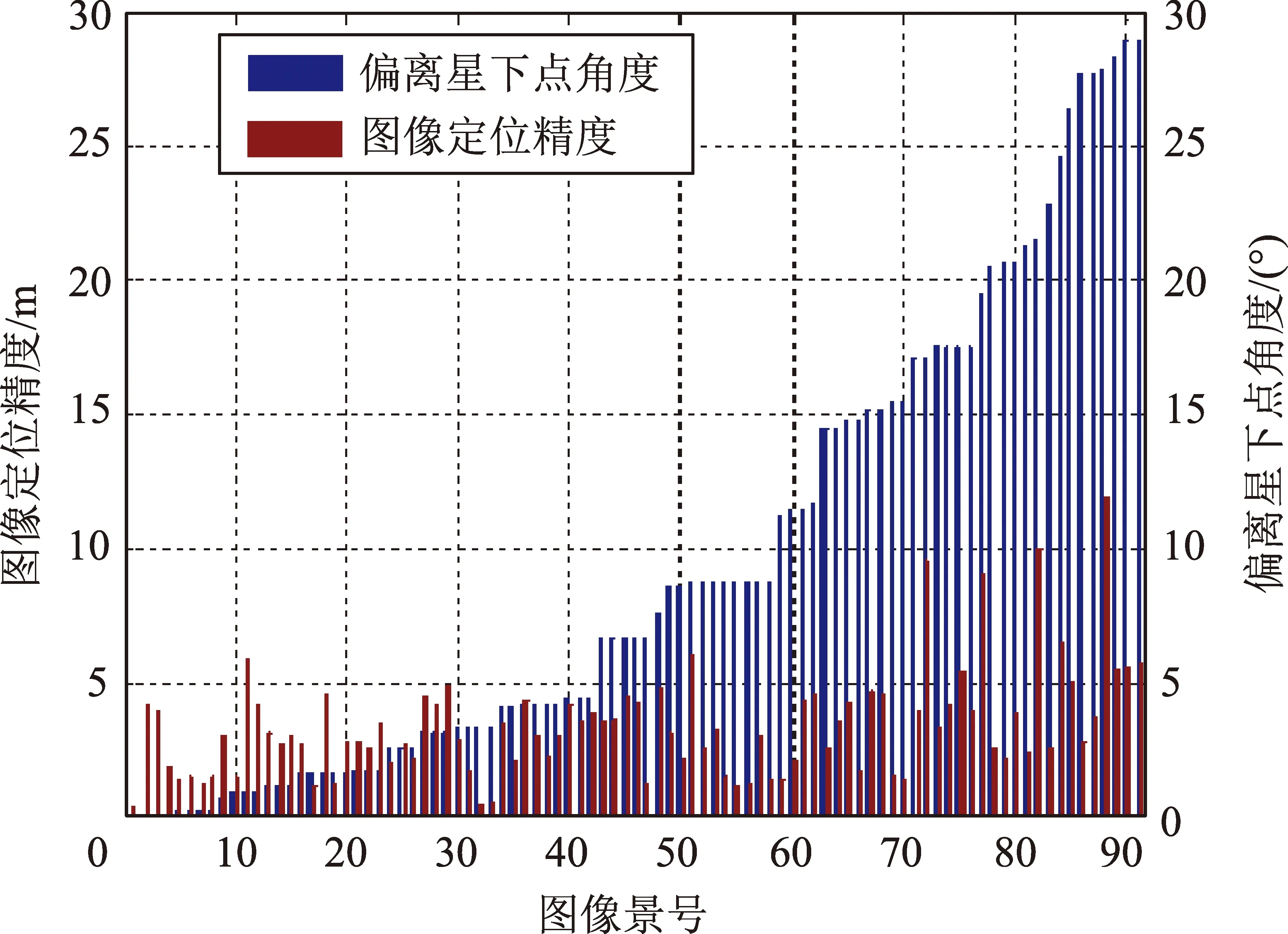
图11 高分多模卫星图像定位精度评估Fig.11 Positioning accuracy evaluation of GFDM-1 satellite
6 结束语
高分多模卫星采用天地一体的图像定位精度保证系统方案,从系统设计、软件、硬件等多方面开展工作,完成了分析、仿真、试验等设计与地面验证工作。在定位精度的关键影响因素中,姿态测量和结构稳定性方面较以往卫星有较大提升。在姿态测量方面,采用甚高精度的星敏感器,制定敏捷成像模式下的定姿切换策略,针对星敏感器-陀螺测量系统中的低频误差,采用引入误差标定的事后姿态确定方案,姿态确定精度提高到1″以内;对于星敏感器-相机的结构稳定性问题,重点从材料、结构和温控多方面开展星上设计,使稳定性达到角秒量级,同时针对外方位元素变化的趋势规律开展研究,提出了地面广域时序化定标方案,进一步减小结构稳定性引起的定位误差,确保图像几何定位精度稳定性。在高分多模卫星上实现了高定位精度保证技术的攻关和在轨验证,其图像定位精度达到国内敏捷遥感卫星最高水平,达到国外同类卫星水平,可以有效支撑后续高分多模卫星高水平的定量化应用。高分多模卫星在轨运行稳定,图像定位精度结果满足设计指标,表明其定位精度体系设计合理可行,可以为后续卫星研制提供参考。