无人驾驶自走式旱地胡麻喷药车转向控制系统设计
2021-06-30张锋伟张方圆赵武云
杨 一,张锋伟,张方圆,杨 天,许 渊,赵武云
(甘肃农业大学机电工程学院,甘肃 兰州 730070)
0 引言
胡麻,即油用亚麻,属于亚麻科(Lianceace)亚麻属(Linum)作物,是我国北方主要油料作物之一。胡麻具有丰富的营养价值与工业价值,逐渐成为我国北方重要的特色油料作物[1-3]。胡麻具有非常强的抗旱、耐寒和耐贫瘠能力,主要种植于山西省、甘肃省、宁夏回族自治区和新疆维吾尔自治区等北方寒带、亚寒带地区。近年来,甘肃省大力发展胡麻种植产业,在推广种植胡麻的同时,大力支持研发各种相关配套农机具,完善胡麻的配套产业[4-6]。
胡麻植株矮小、株型紧凑,是典型的密植型作物,在甘肃省种植行距20 cm左右,旧膜穴播最优间距13.5 cm[7-8]。胡麻种植过程中的田间机械化植保是全程机械化的薄弱环节,大型喷药车不适合甘肃省的农田规模,拖拉机易伤胡麻植株,而遥控植保无人飞机存在续航时间短、电池频繁更换等问题。
自走式喷杆喷药车比较符合甘肃省的胡麻种植条件,本研究设计一款无人驾驶自走式喷杆喷药机及转向控制系统。转向控制系统是自走式喷杆喷药机的关键控制系统之一,液压转向控制系统密封性要求高、结构质量大、占用空间大且反应灵敏度低,电动控制转向更适合自走式胡麻喷药车[9-11]。设计了以直流无刷电机驱动、电推杆为转向控制组件,基于STM32单片机为控制核心的转向系统,以期实现对自走式喷药车转向速度、行走轮轮速的精确控制。
1 自走式胡麻喷药车结构
设计的无人驾驶自走式旱地胡麻喷药车主要由车架、行走机构、转向系统、喷洒系统、控制系统、水泵、电池箱和药箱等组成,结构如图1所示。作业时,操纵者通过遥控器远程控制喷药车的前进、后退、转向、变速和植保等作业。
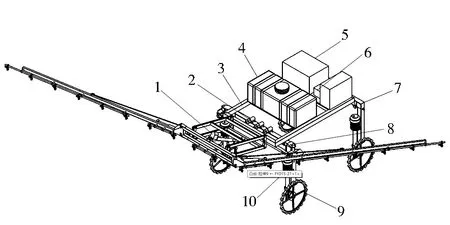
1.喷洒架控制电推杆 2.喷洒水泵 3.车架 4.药箱 5.中央控制箱 6.电池箱 7.幅宽调节机构 8.转向电推杆 9.橡胶钢圈一体轮 10.驱动电机图1 无人驾驶自走式旱地胡麻喷药车结构Fig.1 Structure of driverless self-propelled dry land flax spraying truck
该喷药车的行走与转向控制方案如图2所示,控制系统主要包括中央控制器、电机控制器、驱动电机和转向电推杆等。遥控装置为2.4GHz无线电遥控器。中央控制器采用STM32 F103型芯片单片机,使用Keil uVision5软件编程,对喷药车各动作流程进行决策、控制。控制驱动电机控制器为直流无刷电机控制器,调节轮胎转速,并可根据给定速度自动调整电机功率。控制转向电推杆的电机控制器为直流电机调速器,通过控制电推杆的伸缩方向与伸缩速度,调节喷药车的转弯方向与转弯速度[12-17]。中央控制器在接收到远程控制信号后,根据输入的指令与各处传感器反馈回的数据,通过电机调速器控制驱动电机与转向电推杆实现喷药车行走速度与转向角度的控制。

图2 胡麻喷药车控制系统框架Fig.2 Control system framework of flax spraying truck
2 行走转向机构设计
2.1 行走机构
胡麻喷药车的行走机构主要由仿形机构、驱动电机、传动轴、减速机和橡胶钢圈一体轮等组成,其结构如图3所示。喷药车工作时,中央控制器接收到信号后,控制电机控制器启动电机,将动力传输到蜗轮蜗杆减速机,减速机驱动一体轮以一定的速度行驶。安装在电机上的霍尔传感器将电机转速信息反馈到中央控制器,中央控制器根据各轮的实际转速调整电机转速保持与设定速度一致。

1.橡胶钢圈一体轮 2.传动轴 3.仿形机构 4.驱动电机5.减速机图3 胡麻喷药车行走机构Fig.3 Walking mechanism of flax spraying truck
2.2 转向机构
胡麻喷药车的转向机构主要由旋转编码器、转向电推杆、转向机连杆和转向轴等组成,其结构如图4所示。旋转编码器安装在左侧的转向轴上,监测左侧的转向角度。转向电推杆为LX700型电推杆,行程200 mm。喷药车转向时,中央控制器通过电机控制器启动电推杆,电推杆推动转向机构实现转向。转向时,旋转编码器将监测的喷药车转向角度反馈到中央控制器,中央控制器调节每个轮子的前进速度与转向状态保持一致。

1.旋转编码器 2.转向机连杆 3.转向轴 4.转向电推杆图4 胡麻喷药车转向机构Fig.4 Steering mechanism of flax spraying truck
3 转向控制系统设计
3.1 转向电推杆控制
转向电推杆由直流电机调速器控制,中央控制器通过控制电机调速器的各项功能实现喷药车转向控制。直流电机控制器的正反转控制功能控制电推杆的伸出与缩回,从而控制喷药车的转弯方向;转速调节功能控制电推杆的伸出、缩回速度,从而控制喷药车的转向速度。
3.2 转向时轮速控制
喷药车的轮子由4个直流无刷电机独立驱动。在转向时,每个轮子根据车体的转向角度实时调整转动速度,以符合喷药车当时的运动状态。喷药车转向示意如图5所示,L为喷药车前后轴的轴距,W1为喷药车前轮内外侧车轮的轮距,W2为喷药车后轮内外侧车轮的轮距,R为喷药车后轮中央至绕旋转中心O的距离,即喷药车的转弯半径,α1、α2分别为喷药车左前轮与右前轮转向时的转向角度,v为喷药车的前进速度,v1、v2、v3、v4分别为喷药车左前、右前、左后、右后4个轮胎的转速。

图5 喷药车转向示意Fig.5 Steering sketch of flax spraying truck
以喷药车左转向时为例,左前轮转角角度α1已知,可求出以下数值。
右前轮的偏转角
(1)
喷药车转弯半径
R=cotα1·L+W1/2
(2)
4个轮子的转速
(3)
(4)
(5)
(6)
α1由安装在左前轮转向轴上的旋转编码器测得,编码器为E6B2-CWZ6C 1024P/R型绝对编码器,分辨率为1 024,最小分辨率为0.35°。喷药车转向时,中央控制器收到指令,通过电推杆推动转向机构开始转向。此时旋转编码器测得左前轮的转向角度,中央控制器计算出此时每个轮子的最佳转动速度,通过电机控制器调节驱动电机转动速度,使各轮速度符合此时的转向状况。
4 仿真与分析
4.1 仿真模型的建立
利用仿真软件SolidWorks与ADMAS共同建立无人驾驶自走式旱地胡麻喷药车转向系统的仿真模型。先采用SolidWorks软件对喷药车进行等比例建模,再对喷药车结构进行简化,删去对仿真无影响的多余结构,只保留车体与转向机构;之后将模型导入ADAMS中用于转向机构的仿真[18-19]。喷药车虚拟样机的基础模型如图6所示。
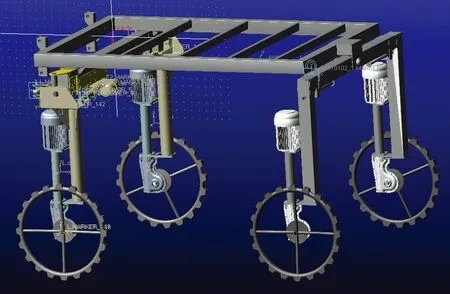
图6 喷药车仿真模型Fig.6 Simulation model of flax spraying truck
4.2 转向系统分析验证
使用ADAMS中Ssimulation control功能对建好模型的转向系统进行仿真。通过改变仿真模型转向电推杆的伸出、缩回距离,模拟并测量转向结构运作时左前轮相对于车体方向的角度,即左前轮的偏转角度。改变电推杆的伸缩距离,使其达到最大值,可得到最 大偏转角度,如图7所示。以电推杆伸出量100 mm(电推杆行程的一半)为零点,将电推杆的伸缩量完全缩回,得到转向角度与电推杆变化关系,如图8所示[20-21]。


图7 转向机构最大转向角Fig.7 Maximum steering angle of steering mechanism

图8 转向机构电推杆与转向角度关系Fig.8 Relationship between electric push rod and steering angle of steering mechanism
仿真数据表明,转向机构的最大左偏角为35.9°,最大右偏角为25.1°,并且在接近最大左偏角处有角度变化加快的趋势,转向机构的实际使用转向角为±25°。电推杆200 mm的行程只使用了70%,没有完全被利用。喷药车前后轴的轴距1 505 mm,前轮内外侧车轮的轮距1 594 mm,LX700型电推杆最大伸缩速度60 mm/s,由计算可得喷药车的最小转弯半径4 m,达到最大转向角用时1.15 s,最大转向角速度21.7°/s。
仿真发现,喷药车转向机构左右两侧的最大偏转角度不一致,越接近左偏转最大处,角度变化越快,电推杆行程使用不足。可以通过调整电推杆底部与车架的安装位置进行优化,以达到更好的效果[22]。
5 结束语
针对北方旱地胡麻的种植要求,设计了无人驾驶自走式旱地胡麻喷药车,确定了整机关键结构系统,对喷药车行走转向机构进行了设计,并进行了仿真计算分析。
喷药车采用四轮独立驱动,每个行走轮由单独的电机驱动,在电机上安装霍尔传感器,检测电机转速,通过反馈调节,使各个行走轮的转动速度与设定速度保持一致。简化了行走机构,提高了喷药车运行的稳定性。采用电推杆转向机构,并在左侧转向轴上安装旋转编码器监测转向角度。通过中央控制器计算同时调节各个行走轮的转动速度,使其符合喷药车转向时的运动状态,提高喷药车转向时的稳定性。
对喷药车的转向系统使用ADAMS软件进行运动学仿真,喷药车转弯角度为±25°,最小转弯半径为4 m,到达单侧最大偏转角用时1.15 s。喷药车转向机构在±25°转向角度内平稳运行。
本文研究的转向控制系统由以STM32型单片机为核心的中央控制器直接发送指令控制,可为无人驾驶自走式旱地胡麻喷药车的智能避障、智能作业提供技术支持。