横轴对辊式棉秆起拔装置设计与试验
2021-06-30张佳喜郜周明蔡佳麟叶尔波拉提铁木尔芮照钰王毅超
张佳喜,郜周明,蔡佳麟,叶尔波拉提·铁木尔,芮照钰,王毅超
横轴对辊式棉秆起拔装置设计与试验
张佳喜,郜周明,蔡佳麟,叶尔波拉提·铁木尔,芮照钰,王毅超
(新疆农业大学机电工程学院,乌鲁木齐 830052)
针对现有棉秆起拔机械作业需对行、漏拔率及拔断率高等问题,该研究设计了横轴对辊式棉秆起拔装置,其主要工作部件为送秆装置与拔秆装置,依据部件作业过程与动力学分析完成了结构参数确定,并获取了作业性能影响因素及其取值范围。以机具前进速度、拨禾杆线速度和拔秆辊转速为影响因子,棉秆漏拔率和拔断率为响应值进行三因素三水平二次回归正交试验,建立了响应面数学模型,并进行了参数优化与验证。结果表明,漏拔率影响因素的显著性顺序为前进速度、拨禾杆线速度和拔秆辊转速,拔断率影响因素的显著性顺序为拔秆辊转速、拨禾杆线速度和前进速度,最优参数组合为前进速度0.68 m/s,拨禾杆线速度1.75 m/s,拔秆辊转速221 r/min,在此参数组合下测得棉秆漏拔率为5.24%,拔断率为3.75%,与理论预测值相对误差均小于4%。研究结果可为棉秆起拔机械设计提供参考。
农业机械;设计;试验;横轴对辊式;棉秆;起拔装置
0 引 言
棉花是重要的经济作物[1],新疆是国内棉花的主要种植区,2019年新疆棉花种植面积达2.540×106hm2,占全国棉花种植面积的76%,产量达5.002×106t,占全国总产量的84.9%[2]。棉秆是棉花种植的主要副产物,是一种重要的可再生生物质资源,可作喂养家禽的饲料,也可用于造纸、食用菌培养、环保材料及生物质型煤燃料等领域[3-7]。因此,棉秆资源若能实现循环利用,将产生巨大的经济利益[8-10]。
国内现有棉秸秆收获大致分为切割收获和起拔收获,其中切割收获类代表机型有中国农业机械化科学研究院研制的4MG-275型自走式棉秆联合收获机[11-12],该收获技术仅收获地表5 cm以上棉秆,存在根茬留地、功耗较高和破坏地膜的问题,不利于后续耕整地、播种作业、地膜回收和农作物的生长[13-14];起拔收获类代表机型有新疆农业机械化研究所生产的4MC-4型铲切式棉花秸秆收获机和天津农机推广总站生产的4MG-2型齿盘式拔棉秆机[15-16],该收获技术可实现棉秆整株拔起[17-19],缺点是需对行拔取、行距适应性较差。国外棉秆整秆起拔机械以对辊式拔棉秆机为主,以一组间隙可调,相对滚动的胶辊(或轮胎)为拔秆部件,作业时需对行[20],仅适应大单行种植模式,无法满足新疆宽窄行密植种植模式[21]。
针对上述问题,本文提出一种横轴对辊相向旋转拉拔的棉秆起拔方式,设计了横轴对辊式棉秆起拔装置,确定了机具工作参数,制作样机并进行了田间试验,拟为棉秆起拔机械设计提供参考。
1 整机结构与工作原理
1.1 整机结构
横轴对辊式棉秆起拔装置由送秆装置、拔秆装置、对辊间距调节机构、传动系统、牵引装置等主要部件组成,其中送秆装置、拔秆装置为主要工作部件,整机结构如图1所示,主要技术参数如表1所示。
1.牵引装置 2.齿轮箱 3.送秆装置 4.传动系统 5.机具主体 6.行走轮 7.对辊间距调节机构 8.拔秆装置 9.挡板 10.支撑架
1.Traction device 2.Gear box 3.Stalk conveying device 4.Transmission system 5.Machine body 6.Road wheel 7. Adjusting mechanism of counter roller spacing 8.Stalk pulling device 9.Baffle 10.Support frame
图1 横轴对辊式棉秆起拔装置结构示意图
<
Fig.1 Structural diagram of cotton stalk pulling device with horizontal-counter rollers
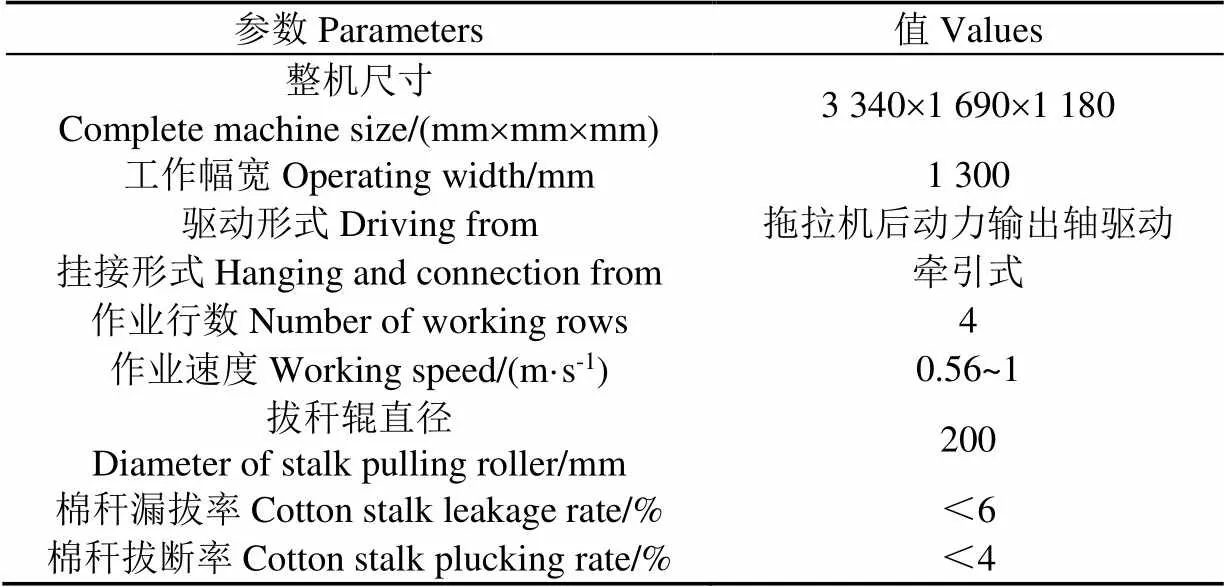
表1 主要技术参数
1.2 工作原理
作业时,齿轮箱上的动力输入轴与拖拉机的动力输出轴通过传动轴相连,由齿轮箱的左动力输出轴通过联轴器将动力传至链传动,最后由链传动传至送秆和拔秆装置,实现齿形皮带转动以及拔秆对辊的相向旋转,进而完成送秆、拔秆作业,如图2所示,齿形皮带上的拨禾杆接触到棉秆后将其折弯至底端喂入点;随机具前进,棉秆接触到拔秆辊,受到拔秆辊相向旋转产生的拉拔力完成喂入起拔作业;棉秆根部被完全拔出后,棉秆受拔秆辊作用完成抛送,平铺于地表。
1.棉秆 2.齿形皮带 3.上拔秆辊 4.下拔秆辊
1.Cotton stalk 2.Toothed belt 3.The upper stalk pulling roller 4.The under stalk pulling roller
注:0为皮带轮角速度,rad·s-1;1为拔秆辊角速度,rad·s-1;m为机具前进速度,m·s-1。
Note:0is the angular velocity of belt pulley, rad·s-1;1is the angular velocity of stalk pulling roller, rad·s-1;mis the forward speed of machine, m·s-1.
图2 棉秆起拔过程示意图
Fig.2 Schematic diagram of cotton stalk pulling process
2 关键部件设计
2.1 送秆装置
送秆装置是影响该机具作业效果的关键部件,主要由皮带轮、齿形皮带、拨禾杆等组成,结构示意图如图3所示。新疆地区棉花多采用宽窄行密植种植模式(660 mm+100 mm)[22],经实地调研知,棉秆株高约为700 mm,株距约为50 mm,设计送秆装置作业幅宽为1 200 mm、竖直高度为700 mm、底端离地高度为200 mm,考虑送秆作业存在一定的速度要求,皮带轮回转半径过小,所需转轴转速过大,装置运行稳定性变差,回转半径过大,能耗增加,设计皮带轮回转半径为80 mm。送秆装置通过拨禾杆与棉秆接触,带动棉秆同步运动至底端完成喂入作业,设计送秆装置为三角形结构,呈45°安装。
1.皮带轮 2.拨禾杆 3.齿形皮带
1.Belt pulley 2.Reel rod 3.Toothed belt
图3 送秆装置结构示意图
Fig.3 Structural diagram of the stalk conveying device
2.1.1 拨禾杆在皮带上的排列间距
拨禾杆等间距安装在齿形皮带上,排列间距大小对送秆装置作业效果有重要的影响。间距过大易造成送秆过程中棉秆遗漏,导致漏拔;间距过小则拨禾杆易出现空转现象,送秆效果不好,且造成材料浪费,能耗增加。为得到合理的拨禾杆排列间距,对拨禾杆进行运动学分析。以机具前进方向的反方向为轴正方向,以棉秆生长方向即垂直于水平地面方向为轴正方向,建立如图4所示坐标系。
注:为拨禾杆与棉秆初始接触点;为底端喂入点;为待作业的拨禾杆位置点;为下一次作业位置点;为拨禾杆一次送秆作业的运动轨迹;为拨禾杆空转行程;为拨禾杆在皮带上的排列间距,mm;为棉秆株距,mm;为皮带轮回转半径,mm;β为棉秆折弯角,(°);v为拨禾杆线速度,m·s-1。
Note:is the initial contact point between the stalk conveying rod and cotton stalk;is the bottom feeding point;is reel rod for next operation;′ is the location point for next operation;is the motion track of one stalk conveying operation;′ is a idle stroke of next reel rod;is the distance of reel rod on the belt, mm;is the distance between cotton stalks, mm;is the turning radius of belt pulley, mm;βis the bending angle of cotton stalk, (°);vis the speed of reel rod, m·s-1.
图4 拨禾杆运动轨迹示意图
Fig.4 Motion trajectory diagram of the reel rod
设一次送秆作业所用时间为1,由点运动至′点所用时间为2,对拨禾杆的速度矢量分析,如图5所示。
注:为拨禾杆轨迹方向角,(°);为送秆装置安装固定角,(°);为拨禾杆绝对速度,m·s-1;v为v在轴上的分速度,m·s-1;v为v在轴上的分速度,m·s-1;v为在轴上的分速度,m·s-1;v为在轴上的分速度,m·s-1。
Note:is the direction angle of the motion track of reel rod, (°);is the installation angle of the stalk conveying device, (°);is the absolute speed of reel rod, m·s-1;vis the partial velocity ofvon the-axis, m·s-1;vis the partial velocity ofvon the-axis, m·s-1;vis the partial velocity ofon the-axis, m·s-1;vis the partial velocity ofon the-axis, m·s-1.
图5 拨禾杆速度矢量分析
Fig.5 Velocity vector analysis of the reel rod
由图5可知,下一次送秆作业的初始位置点′坐标为(vT2cos-vT2,-vT2sin)。一次送秆作业拨禾杆只作用于一根棉秆,因此△′应满足以下关系:
由前文可知,棉秆株距=50 mm,送秆装置安装固定角=45°,代入式(1)求得拨禾杆排列间距为70.7~212 mm,考虑到棉秆姿态错综复杂,取拨禾杆排列间距=200 mm。
2.1.2 拨禾杆线速度
拨禾杆线速度大小决定棉秆在底端的喂入状态,进而影响棉秆起拔效果。为得到较优的起拔效果,需选择合理的拨禾杆线速度,因此对送秆作业过程分析,如图6所示。
在△中,根据几何关系有:
由此可得:
由式(3)可知,值与棉秆在底端喂入时的折弯角呈负相关,依据前文可知,棉秆高度H=700 mm、皮带轮回转半径=80 mm、皮带轮回转中心离地高度2=200 mm、皮带轮底边离地高度1=120 mm、送秆装置安装固定角=45°,根据自制折弯装置测试结果知棉秆与竖直方向夹角最小为64.88°时发生折断,为保证棉秆喂入时不被折断,需保证>25.12°,将相关数据代入式(3)求得值最大值为max=1.33,即≤1.33时,棉秆不会发生折断。
注:1为拨禾杆运动轨迹长度,mm;2为长度,mm;3为长度,mm;4为一次送秆作业机具前进距离长度,mm;为下皮带轮轴心水平延长线与交点;为与下皮带轮切点;为延长线与地面水平线交点;为棉秆初始状态;为棉秆最终喂入状态;1为喂入点离地高度,mm;2为下皮带轮轴心离地高度,mm;H为棉秆高度,mm;为过点的垂线与夹角,(°)。
Note:1is the length of the motion trackof the reel rod, mm;2is the length of, mm;3is the length of, mm;4is the length of the advance distanceof a stalk conveying operation, mm;is the intersection point between the horizontal extension line of the center of the lower pulley and;is the tangential point betweenand the lower pulley;is the intersection point ofextension line and ground level;is the initial state of cotton stalk;is the final feeding state of cotton stalk;1is the height above the ground of point, mm;2is the height from the ground of the center of the lower pulley, mm;His the length of cotton stalk, mm;is the angle betweenperpendicular through pointand, (°).
图6 送秆作业过程分析
Fig.6 Analysis of the stalk conveying process
拨禾杆若要完成送秆作业,需保证其在水平方向上的分速度大于前进速度。由图5知,当夹角接近45°时,送秆效果较好,但作业效率较低。由图5几何关系得:
联立式(3)、式(4)得:
tan=(5)
综上分析,有<45°,代入式(5)求得<1,满足棉秆不被折断的要求(≤1.33)。将值代入式(4)求得前进速度与拨禾杆线速度的比值v/v<0.707,前期样机测试选用常发CFD604A拖拉机输出动力,依据其档位设置,测得前进速度v约为0.56~1 m/s,由此得拨禾杆线速度为v>1.414 m/s。
2.2 拔秆装置
2.2.1 拔秆辊
拔秆装置安装在送秆装置后方,由1对拔秆辊组成,作业过程中,拔秆装置利用对辊相向旋转产生的拉拔力实现棉秆起拔。其中拔秆辊主要由辊轴、空心橡胶辊筒、端板组成,如图7所示。
1.橡胶辊筒 2.端板 3.辊轴
1.Rubber roller 2.End plate 3.Roll shaft
图7 拔秆装置结构示意图
Fig.7 Structural diagram of the stalk pulling device
根据新疆地区棉花宽窄行密植种植模式,确定拔秆辊作业幅宽为1 250 mm。拔秆装置是完成拔秆作业的主要工作部件,其中拔秆辊回转半径和转速大小对棉秆起拔有重要影响,为确定合理的拔秆辊回转半径和转速,对棉秆起拔过程受力分析,如图8所示。
注:0为棉秆的初始起拔角,(°);为棉秆直径,mm;为拔秆对辊间距,mm;为拔秆辊回转半径,mm;为棉秆与拔秆辊的摩擦系数;为拔秆辊对棉秆的压紧力,N;F为土壤黏结力,N;1为棉秆与拔秆辊初始接触点;1为拔秆辊轴心连线上一点;1为拔秆辊转轴轴心。
Note:0is the initial pulling angle of cotton stalk, (°);is the diameter of cotton stalk, mm;is the distance between pulling rollers, mm;is the radius of pulling roll, mm;is the friction coefficient between cotton stalk and roller;is the force of pulling roller on cotton stalk, N;Fis the force of soil bonding, N;1is the initial contact point between the cotton stalk and the pulling roller;1is the point connected to the center of the pulling roller;1is the shaft center of the pulling roller.
图8 棉秆起拔过程分析
Fig.8 Analysis of the stalk pulling process
由图8可知,棉秆若要成功喂入并完成拔起,拔秆辊需满足:
整理得:
由式(6)知,棉秆与拔秆辊之间摩擦系数愈大对棉秆起拔愈有利,本文选用摩擦系数较大的橡胶辊筒。橡胶辊筒具有良好的弹性,可使辊筒与棉秆的接触面完全贴合,棉秆弹性模量一定,选用弹性较好的橡胶辊筒可将棉秆一部分形变转移至橡胶辊筒上,在一定程度上对棉秆也起到防断作用。在△111中:
又由三角变换公式得:
联立式(7)、式(8)、式(9)得:
经实地调研可知,棉秆直径约为7~13 mm,秸秆与喂入辊之间的摩擦系数一般为0.3~0.7[23],本文取0.47,代入式(10)求得拔秆辊回转半径为≥68 mm,又由式(8)知,拔秆辊回转半径增加会导致棉秆初始起拔角0减小,使拔秆辊的棉秆喂入起拔能力增强,故拔秆辊回转半径应取较大值,取拔秆辊回转半径=100 mm。
拔秆辊的绝对运动为拔秆辊的圆周运动与前进运动的合成,其中拔秆辊圆周线速度v为:

式中v为拔秆辊圆周线速度,m/s;为拔秆辊转速,r/min。
依据农业机械设计手册[24],取拔秆辊的圆周线速度与前进速度比值为2~3,依据前文知,前进速度为0.56~1 m/s,代入式(11)求得拔秆辊转速为191~287 r/min。拔秆辊上任一点的运动轨迹为余摆线,拔秆辊圆周线速度大于前进速度可实现棉秆向后拔起与抛送,但速度不宜过快,过快易拔断棉秆[25]。
2.2.2 对辊间距调节机构
拔秆对辊对棉秆的压紧力是影响棉秆起拔的重要因素,为此,选择在上拔秆辊安装对辊间距调节机构,结构如图9a所示。对辊间距调节机构可将棉秆所受正压力控制在合理范围内,从而避免棉秆被压裂;同时在作业时,上拔秆辊可随棉秆喂入量变化而上下浮动,实现对辊间距的自适应调节,使喂入的棉秆始终处于压实状态,有利于棉秆起拔作业。
间距调节机构固定安装于箱体侧板,考虑机构的制造、安装可操作性,设计回转杆长度为485 mm,下辊转轴与方形座轴承轴心距为290 mm,上辊转轴与方形座轴承轴心距为190 mm,固定支架中心与方形座轴承轴心距为515 mm,对拔秆辊间距调节机构简化,如图9b所示。
在△222、△222′、△222中,由余弦定理可得:
在△22′2中:
式中Δ为压缩弹簧最大压缩变形量,mm。
依据前文可知,回转杆长度7=485 mm,对辊回转中心间距9=200 mm,压簧原长8=75 mm,5=290 mm,6=190 mm,10515 mm,结合前文分析知,对辊间距最大为9=213 mm,代入式(12)~(14)求得压簧压缩后最短长度8=44 mm,代入式(15)求得压簧最大压缩变形量Δ=31 mm。
压簧选用圆柱螺旋压缩弹簧,依据《GB/T 2089-2009 普通圆柱螺旋压缩弹簧尺寸及参数(两端圈并紧磨平或制扁)》[26],选用压簧原长为75 mm,压簧中径为30 mm,弹簧丝直径为5 mm,压簧刚度为35 N/mm,上拔秆辊质量约为150 kg,则棉秆起拔过程中每株所受到的压紧力最大为:
式中为上拔秆辊质量,kg;′为压簧刚度,N/mm。
将相关数据代入式(16)求得F=910 N,单株棉秆最大起拔力为821.1 N[27],由前文棉秆喂入起拔过程受力分析,可求得所需压紧力最大为873.5 N,拔秆对辊对棉秆的压紧力大于棉秆起拔所需压紧力最大值,可保证棉秆被顺利起拔。
3 田间试验
3.1 试验材料
2019年10月20-25日,在新疆库尔勒市尉犁县一块秋收后的棉田进行试验。库尔勒属新疆南疆部分,温带大陆性气候,常年干旱少雨,经测量,试验地土壤坚实度约为467 kPa,土壤含水率为15%~20%,棉花品种为新陆早45号,平均高度700 mm,有少量倒伏,采用宽窄行(660 mm+100 mm)密植种植模式,株距为50 mm左右,每平方米种植约34株棉花。试验仪器设备有常发CFD604A轮式拖拉机(标定功率44.2 kW)、TJSD-750-Ⅱ型数显式土壤紧实度测定仪、QS-WT型土壤水分温度测定仪、转速仪、链轮等,试验现场如图10所示。
3.2 试验方案
基于对横轴对辊式棉秆起拔装置关键部件的作业过程及动力学分析,确定影响拔秆效果的主要因素为拨禾杆线速度、拔秆辊转速及前进速度,因此选取前进速度1、拨禾杆线速度2、拔秆辊转速3作为试验因素。
试验配套使用常发CFD604A轮式拖拉机,由驾驶员调节拖拉机档位控制速度,试验选取机组前进速度分别为拖拉机慢1挡(平均速度约为0.56 m/s)、慢2挡(平均速度约为0.78 m/s)、快1挡(平均速度约为1 m/s);拨禾杆线速度、拔秆辊转速均通过变换齿轮箱左侧动力输出轴上的主动链轮实现速度调整,试验中保持拖拉机转速恒定,根据拖拉机实际输出转速,实测经链传动传至送秆装置后所得皮带轮转速分别为179、209、239 r/min,由线速度相关计算求得拨禾杆线速度分别为1.5、1.75、2 m/s,实测经链传动传至拔秆装置后所得拔秆辊转速分别为191、239、287 r/min。
试验采用Box-Benhnken中心组合设计方法,以三因素三水平二次回归正交为试验方案[28-29],依据前文分析计算结果,试验因素和水平如表2所示。
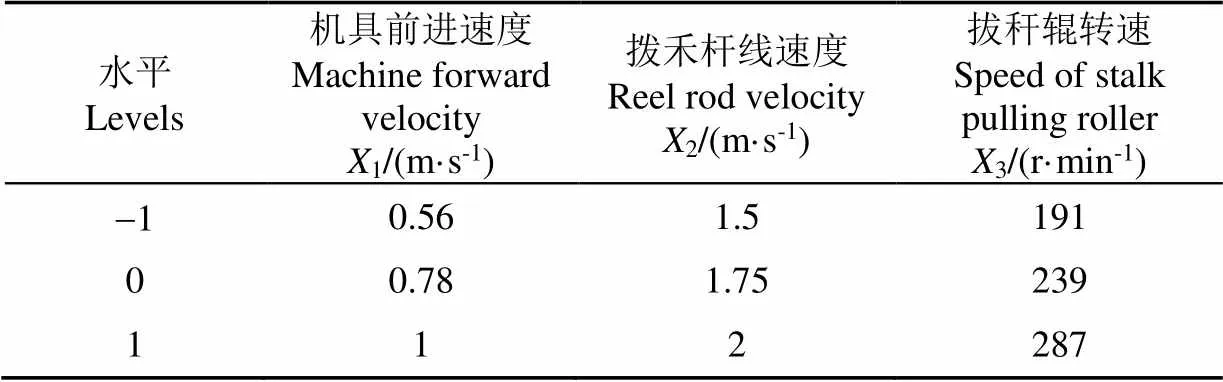
表2 试验因素和水平
3.3 试验指标
试验开展参考《GB/T 8097-2008 收获机械联合收割机试验方法》[30],考察所设计的横轴对辊式棉秆起拔装置作业性能。试验前首先进行机具工位调整,待机具调整完毕且稳定运行后进行试验,每组试验重复3次,每次试验长度为10 m,试验结果取平均值。试验前选取长度300 m宽度150 m的区域进行棉秆总数统计记为,统计试验后棉秆漏拔数记为1,棉秆拔断数记为2,选取棉秆漏拔率1、棉秆拔断率2为评价指标,计算方式如下:
式中1为每组试验区域内棉秆漏拔数;2为每组试验区域内棉秆拔断数;为每组试验区域内棉秆总数。
4 结果与分析
4.1 试验结果与显著性分析
试验方案与结果如表3所示,利用Design Expert 8.0.6软件对试验结果进行二次回归分析[31],建立棉秆漏拔率、拔断率对前进速度、拨禾杆线速度、拔秆辊转速3个自变量二次多项式响应面回归模型,如式(18)~(19)所示,并对回归模型进行方差分析,结果如表4所示。

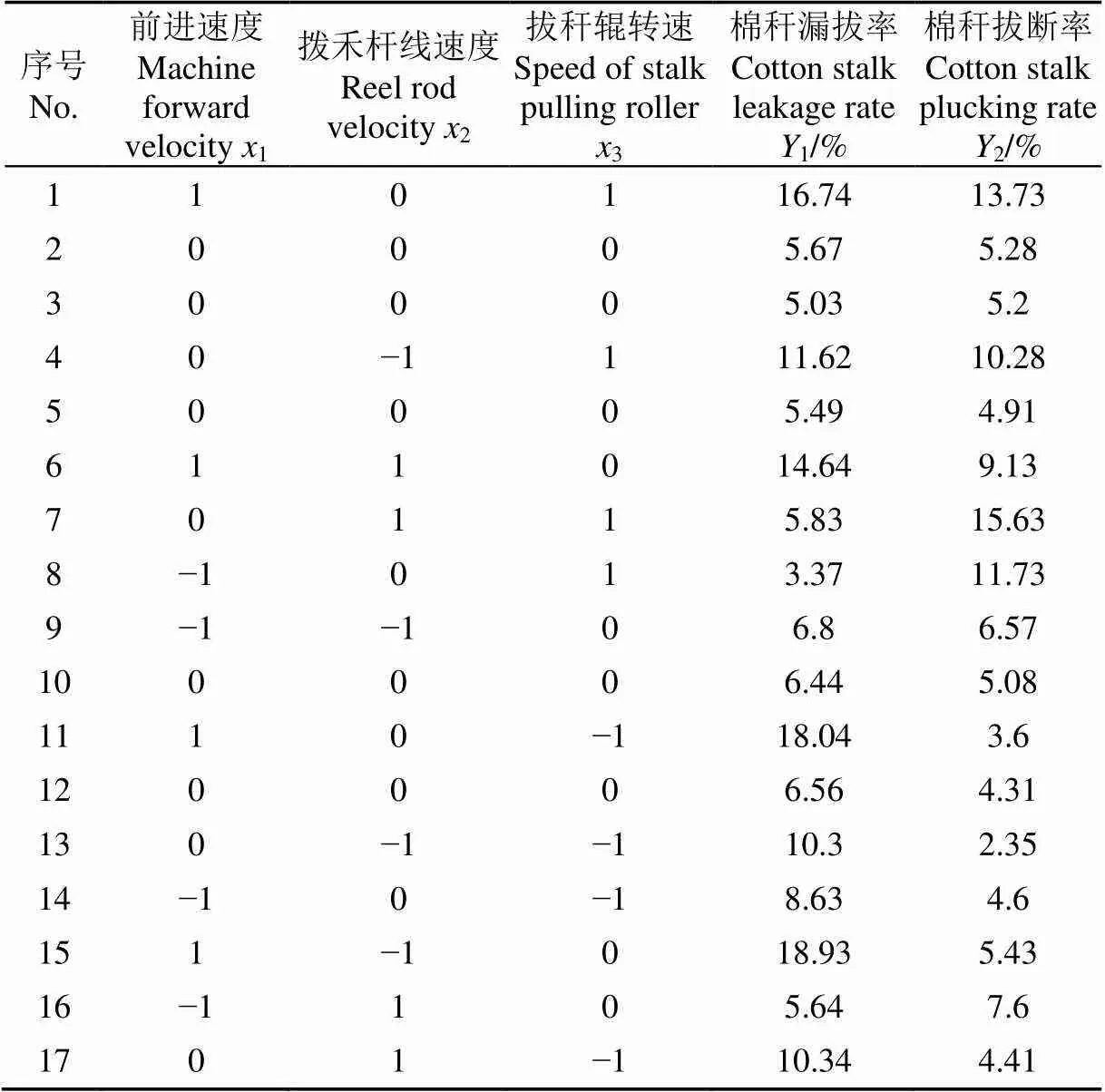
表3 试验方案与结果
注:1、2、3为1、2、3的水平值。
Note:1,2and3are the level values of1,2and3.
由表4方差分析可知,评价指标棉秆漏拔率1、拔断率2的值均小于0.000 1,表明该回归模型高度显著,其决定系数2值均大于0.98,说明回归模型可拟合98%以上的试验结果。

表4 回归模型方差分析
值大小反映各参数对回归模型的影响程度,棉秆漏拔率1模型中除12影响不显著(>0.05)外,其余回归项均为影响显著(<0.05);棉秆拔断率2模型中除1影响不显著(>0.05)外,其余回归项均为影响显著(<0.05)。由表4各因素值可知,各因素对棉秆漏拔率1的影响显著性从大到小为:1、2、3;对棉秆拔断率2的影响显著性从大到小为:3、2、1。
图11a为漏拔率对拔秆辊转速和前进速度的响应曲面图,可看出拔秆辊转速一定时,漏拔率随前进速度的增加而增大,当前进速度一定时,漏拔率随拔秆辊转速增加先减小后增大,由曲面变化趋势可知前进速度对漏拔率的影响比拔秆辊转速显著。图11b为拔断率对拨禾杆线速度和拔秆辊转速的响应曲面图,可看出当拔秆辊转速固定时,拔断率随拨禾杆线速度增加而增大,当拨禾杆线速度固定时,拔断率对拔秆辊转速增加而增大。由曲面变化趋势可知拔秆辊转速对拔断率的影响比拨禾杆线速度显著。结合田间试验,考虑产生漏拔、拔断的原因是:棉田经机采棉作业后,工况复杂,存在部分棉秆倒伏较严重的情况,机具无法完成送秆作业,导致漏拔;当前进速度过大时,机具无法及时将棉秆输送至底端完成喂入,送秆效果较差,造成漏拔;采棉机摘锭部件会对棉秆造成一定程度的损伤,在棉秆起拔时易出现拔断的情况。
4.2 参数优化与试验验证
利用Design-Expert 8.0.6软件对漏拔率和拔断率回归模型进行优化求解,在Optimization模块中将漏拔率和拔断率设置为minimize模式,求得优化组合为:前进速度0.68 m/s,拨禾杆线速度1.73 m/s,拔秆辊转速221.54 r/min,棉秆漏拔率、拔断率预测值分别为5.06%和3.83%。
为验证软件优化的参数组合的准确性,于库尔勒尉犁县进行田间验证试验,试验前将装置工作参数分别调定为拨禾杆线速度1.75 m/s、拔秆辊转速221 r/min,机组在前进速度0.68 m/s状态下进行试验,试验重复3次,取3次均值为验证值。试验结果表明,优化参数组合下的漏拔率为5.24%,拔断率为3.75%,理论预测值与3次试验均值的相对误差均小于4%,满足设计要求,证明参数优化模型合理。
5 讨 论
横轴对辊式棉秆起拔装置采用横轴对辊相向旋转拉拔的方式完成棉秆起拔作业,在原有棉秆起拔方式基础上设计了横轴对辊式棉秆起拔机构,原有齿盘式拔秆机构适用于大单行种植模式,单次可完成2行棉秆起拔作业[19],横轴对辊式棉秆起拔机构适用于新疆机采棉密植种植模式,单次可完成4行棉秆起拔作业,在一定程度上提高了作业效率;相比于原有夹持皮带式拔秆机构[21],横轴对辊式拔秆装置棉秆拔断率降低了6.2%,漏拔率也相对减小。
依据样机参数优化结果可知,机具在前进速度为0.68 m/s时作业效果最佳,但作业效率较低。机具采用链传动的方式进行作业,若前进速度过快,则链传动稳定性较差,还会使棉秆起拔作业前的棉秆喂入效果不佳,导致棉秆漏拔;机采棉作业后棉秆姿态错综复杂,呈散乱状态,机具送秆作业难度较大。需对机具进行优化改进,以期在较高作业效率下实现最佳的棉秆起拔效果。
6 结 论
1)针对现有棉秆起拔机械作业需对行、漏拔率及拔断率高等问题,设计了横轴对辊式棉秆起拔装置,确定了机具送秆装置、拔秆装置等关键部件的结构参数,并依据部件作业过程与动力学分析,确定了工作参数要求并进行了试验验证。
2)各因素对棉秆漏拔率显著性影响顺序依次为前进速度、拨禾杆线速度和拔秆辊转速;对拔断率显著性影响顺序依次为拔秆辊转速、拨禾杆线速度和前进速度。
3)通过优化分析与试验验证,得最佳参数组合为前进速度0.68 m/s,拨禾杆线速度1.75 m/s,拔秆辊转速221 r/min,试验结果为棉秆漏拔率5.24%,拔断率3.75%,与模型预测结果基本吻合,满足机具设计要求。
4)在原有棉秆起拔方式基础上设计了横轴对辊式棉秆起拔机构,相比于齿盘式拔秆机构,横轴对辊式棉秆起拔装置在一定程度上提高了作业效率;相比于夹持皮带式拔秆机构,横轴对辊式拔秆装置棉秆拔断率降低了6.2%,漏拔率也相对减小。
[1] 黄铭森,石磊,张玉同,等. 刷辊式采棉机的改进设计与试验[J]. 农业工程学报,2017,33(20):41-47.
Huang Mingsen, Shi Lei, Zhang Yutong, et al. Revised design and experiments on brush-rolling cotton harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 41-47. (in Chinese with English abstract)
[2] 国家统计局. 国家统计局关于2019年棉花产量的公告[EB/OL].[2019-12-17].http://www.stats.gov.cn/tjsj/zxfb/201912/t20191217_1718007.html.
[3] 张枫叶,王伟,刘卫星,等. 我国棉花秸秆利用现状及前景分析[J]. 中国棉花,2016,43(8):21-23.
Zhang Fengye, Wang Wei, Liu Weixing, et al. Analysis of utilization status and prospect of cotton straw in China[J]. Cotton of China, 2016, 43(8): 21-23. (in Chinese with English abstract)
[4] 宋占华,宋华鲁,闫银发,等. 棉花秸秆往复式切割器动刀片优化设计[J]. 农业工程学报,2016,32(6):42-49.
Song Zhanhua, Song Hualu, Yan Yinfa, et al. Optimizing design on knife section of reciprocating cutter bars for harvesting cotton stalk[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(6): 42-49. (in Chinese with English abstract)
[5] 张宏喜,赵秀峰,魏玲,等. 棉杆水解制备木糖的研究[J]. 安徽农业科学,2010,38(23):12687-12689.
Zhang Hongxi, Zhao Xiufeng, Wei Ling, et al. Preparing D-xylose from Cotton Stalk[J]. Anhui Agricultural Sciences, 2010, 38(23): 12687-12689. (in Chinese with English abstract)
[6] 王贤华,邓勇,李允超,等. 棉秆炭吸附糠醛机理研究[J]. 农业机械学报,2015,46(5):208-213.
Wang Xianhua, Deng Yong, Li Yunchao, et al. Mechanism of furfural adsorption by carbon from cotton stalk[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5): 208-213. (in Chinese with English abstract)
[7] 宋孝周,雷亚芳,傅峰. 棉秆重组方材制备工艺与试验[J]. 农业机械学报,2013,44(5):164-168.
Song Xiaozhou, Lei Yafang, Fu Feng. Preparation technology and experiment of cotton stalk recombination square material[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 164-168. (in Chinese with English abstract)
[8] 张晶晶. 棉花秸秆收获打捆机的数字化设计[D]. 石家庄:河北科技大学,2014.
Zhang Jingjing. Digital Design of Cotton Straw Harvest Baler[D]. Shijiazhuang: Hebei University of Science and Technology, 2014. (in Chinese with English abstract)
[9] 刘之坛. 循环经济与企业技术创新的关系研究[D]. 武汉:武汉理工大学,2008.
Liu Zhitan. Research on the Relationship Between Circular Economy and Enterprise Technology Innovation[D]. Wuhan: Wuhan University of Technology, 2008. (in Chinese with English abstract)
[10] 陈彬. 循环经济的生态技术观解析[D]. 沈阳:东北大学,2006.
Chen Bin. Analysis of Ecological Technology View of Circular Economy[D]. Shenyang: Northeastern University, 2006. (in Chinese with English abstract)
[11] 孙玉峰,陈志,董世平,等. 4MG-275型自走式棉秆联合收获机切碎装置的研究[J]. 农机化研究,2012,34(6):13-16,21.
Sun Yufeng, Chen Zhi, Dong Shiping, et al. Research on cutting device of 4MG-275 self-propelled cotton stalk combine harvester[J]. Agricultural mechanization research, 2012, 34(6): 13-16, 21. (in Chinese with English abstract)
[12] 崔相全,马继春,荐世春,等. 我国棉花棉秆收获机械现状及发展趋势[J]. 农业装备与车辆工程,2011(11):4-6.
Cui Xiangquan, Ma Jichun, Jian Shichun, et al. Current status and development trend of cotton stalk harvesting machinery in China[J]. Agricultural Equipment and Vehicle Engineering, 2011(11): 4-6. (in Chinese with English abstract)
[13] 宋占华,宋华鲁,耿爱军,等. 棉花秸秆双支撑切割性能试验[J]. 农业工程学报,2015,31(16):37-45.
Song Zhanhua, Song Hualu, Geng Aijun, et al. Experiment on cutting characteristics of cotton stalk with double supports[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(16): 37-45. (in Chinese with English abstract)
[14] 王锋德,陈志,董世平,等. 自走式棉秆联合收获机设计与试验[J]. 农业机械学报,2009,40(12):67-70,66.
Wang Fengde, Chen Zhi, Dong Shiping, et al. Design and test of self-walking cotton stalk combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(12): 67-70, 66. (in Chinese with English abstract)
[15] 王桂盛,贡献,陈胜达,等. 4MC-4型棉柴收获机的研制[J]. 粮油加工与食品机械,1999(6):23-25.
Wang Guisheng, Gong Xian, Chen Shengda, et al. Development of 4MC-4 type cotton harvester[J]. Grain and Oil Processing and Food Machinery, 1999(6): 23-25. (in Chinese with English abstract)
[16] 张佳喜,叶菲. 我国棉花秸秆收获装备现状分析[J]. 农机化研究,2011,33(8):241-244.
Zhang Jiaxi, Ye Fei. Analysis of the status quo of cotton stalk harvesting equipment in China[J]. Journal of Agricultural Mechanization Research, 2011, 33(8): 241-244. (in Chinese with English abstract)
[17] 贺小伟,刘金秀,王旭峰,等.密植棉秆对行铲拔铺放机设计与试验[J].农业机械学报,2020,51(10):142-151.
He Xiaowei, Liu Jinxiu, Wang Xufeng, et al. Design and experiment of row-controlled shoveling and drawing placement machine for cotton stalks based on agronomy of close planting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(10): 142-151. (in Chinese with English abstract)
[18] 贺小伟,刘金秀,徐杨,等.4MB-6型密植棉秆对行铲拔铺放机改进设计[J].农业机械学报,2020,51(S2):21-30.
He Xiaowei, Liu Jinxiu, Xu Yang, et al. Improvement design of 4MB-6 row controlled shoveling and drawing placement machine for cotton stalks in close planting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S2): 21-30. (in Chinese with English abstract)
[19] 张佳喜,汪珽珏,陈明江,等. 齿盘式棉秆收获机的设计[J]. 农业工程学报,2019,35(15):1-8.
Zhang Jiaxi, Wang Tingjue, Chen Mingjiang, et al. Design of toothed disc type cotton stalk harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(15): 1-8. (in Chinese with English abstract)
[20] 唐遵峰,韩增德,甘帮兴,等. 不对行棉秆拔取收获台设计与试验[J]. 农业机械学报,2010,41(10):80-85.
Tang Zunfeng, Han Zengde, Gan Bangxing, et al. Design and test of cotton stalk extraction harvesting platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 80-85. (in Chinese with English abstract)
[21] 蔡佳麟,张佳喜,叶尔波拉提·铁木尔,等. 夹持带式棉秆收获机设计与试验[J]. 农业机械学报,2020,51(10):152-160.
Cai Jialin, Zhang Jiaxi, Yeerbolati·Tiemuer, et al. Design and test of clamping belt cotton straw harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(10): 152-160.
[22] 武建设,陈学庚. 新疆兵团棉花生产机械化发展现状问题及对策[J]. 农业工程学报,2015,31(18):5-10.
Wu Jianshe, Chen Xuegeng. Present situation problems and countermeasures of cotton production mechanization development in Xinjiang production and construction corps[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 5-10. (in Chinese with English abstract)
[23] 汪莉萍. 复合式秸秆粉碎机设计方法理论研究[D]. 哈尔滨:东北林业大学,2010.
Wang Liping. Research of Design Theory for Composite Straw Grinder[D]. Harbin: Northeast Forestry University, 2010. (in Chinese with English abstract)
[24] 陈志. 农业机械设计手册[M]. 北京:中国科学技术出版社,2007.
[25] 李怡,张国忠,周勇,等. 棉秆田间起拔力测量系统设计与试验[J]. 农业工程学报,2013,29(18):43-50.
Li Yi, Zhang Guozhong, Zhou Yong, et al. Design and field experiment of drawing resistance measurement system for cotton stalk[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(18): 43-50. (in Chinese with English abstract)
[26] 中华人民共和国国家质量监督检验检疫总局. 普通圆柱螺旋压缩弹簧尺寸及参数(两端圈并紧磨平或制扁):GB/T 2089-2009, [S]. 北京:中国标准出版社,2010.
[27] 陈佳林,曹肆林,卢勇涛,等. 棉秆起拔力关键因素的研究及试验[J]. 农机化研究,2019,41(5):148-151,167.
Chen Jialin, Cao Silin, Lu Yongtao, et al. Research and experiment on the key factors of cotton stalk pulling power[J]. Agricultural mechanization research, 2019, 41(5): 148-151, 167. (in Chinese with English abstract)
[28] 杨庆璐,王庆杰,李洪文,等. 气力集排式排肥系统结构优化与试验[J]. 农业工程学报,2020,36(13):1-10.
Yang Qinglu, Wang Qingjie, Li Hongwen, et al. Structural optimization and test of pneumatic set and discharge fertilizer system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(13): 1-10. (in Chinese with English abstract)
[29] 张佳喜,刘阿朋,李骅,等. 棉花秸秆炭微波裂解生产设备研制[J]. 农业工程学报,2020,36(8):219-225.
Zhang Jiaxi, Liu Apeng, Li Hua, et al. Development of microwave pyrolysis equipment for cotton stalk carbon[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(8): 219-225. (in Chinese with English abstract)
[30] 中华人民共和国国家质量监督检验检疫总局. 收获机械联合收割机试验方法:GB/T 8097-2008, [S]. 北京:中国标准出版社,2009.
[31] 袁盼盼,朱兴亮,尤佳,等. 酿酒葡萄曲轴式振动脱粒收获装置研制[J]. 农业工程学报,2020,36(9):67-74.
Yuan Panpan, Zhu Xingliang, You Jia, et al. Development of vibration threshing and harvesting device for wine grape crankshaft[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(9): 67-74. (in Chinese with English abstract)
Design and experiments of cotton stalk pulling machine with horizontal-counter rollers
Zhang Jiaxi, Gao Zhouming, Cai Jialin, Yeerbolati·Tiemuer, Rui Zhaoyu, Wang Yichao
(School of Mechanical and Electrical Engineering, Xinjiang Agricultural University, Urumqi 830052, China)
Cotton, one of the main commercial crops in the world, mostly distributes in several major growing regions, including Xinjiang of western China. An important renewable biomass resource, the cotton stalk has received most attention to serving as the poultry feed, paper making, environmental protection materials, and biomass briquette fuel. Particularly, the highly efficient recycling of cotton stalk can be widely expected to bring enormous economic and ecological benefits. However, most previous treatments are focused on pulverizing cotton stalks and returning to the field. A great challenge is still posed on the current pulling machines for cotton stalks, with emphasis on operational requirements, leakage, and breaking rate. In this study, a novel horizontal-roller cotton stalk pulling machine was proposed to efficiently implement the pulling of the whole cotton stalk after harvesting. The machine was mainly composed of traction, gearbox, stalk conveying, transmission system, machine body, road wheel, spacing regulating mechanism, stalk pulling, dam-board, and support frame. Specifically, the power input shaft of the gearbox was connected to the power output shaft of a tractor. In working, the power was transferred to the chain drive by the power output shaft of a gearbox, and then to realize the stalk conveying and pulling operation under the rotation of the toothed belt and the opposite rotation of the stalk pulling roller. A systematic kinematic analysis was conducted to determine the influencing factors in the working process. A field test was also carried out in a farmland in Korla City, Xinjiang Uygur Autonomous Region of China in October 2019. The soil firmness was 467 kPa, and the moisture content of the soil was 15%-20%, due to the perennial drought and little rain in the study area. The average height of cotton stalk was 700 mm, while, the plant spacing was 50 mm in a wide and narrow close planting mode. The power was from a CFD604A wheeled tractor with a calibrated power of 44.2 kW. The test was performed on the national standard of a harvester combine test (GB/T 8097-2008). A three-level quadratic regression orthogonal test was designed, where the forward velocity of the machine, the rod velocity of the deflector, and the speed of the stalk pulling roller were selected as the influencing factors, whereas, the leakage rate and plucking rate were the response factors. A response surface method was utilized to establish the regression equations for the relationship between the factors and assessment indexes. An optimal combination of parameters was obtained, while an experiment was also conducted to verify the mathematical model. The test results demonstrated that there were great effects of factors on the performance of horizontal-roller cotton stalk pulling. The significant effects on the leakage rate were ranked in a decreasing order: the forward velocity of the machine, the rod velocity of the deflector, and the speed of the stalk pulling roller. Correspondingly, the significant effects on the plucking rate were ranked in a decreasing order: the speed of the stalk pulling roller, the rod velocity of the deflector, and the forward velocity of the machine. The verification test indicated that the leakage rate of the cotton stalk was 5.24%, and the plucking rate was 3.75%,when the forward velocity of the machine was 0.68 m/s, the rod velocity of the deflector was 1.75 m/s, and the speed of the stalk pulling roller was 221 r/min. The optimal combination was better consistent with the predicted one in model optimization, indicating a reasonable structural design. The findings can provide a sound reference for the structural design and optimization of operation parameters in the horizontal-roller cotton stalk pulling machine.
agricultural machinery; design; test; horizontal-roller; cotton stalk; pulling device
2020-12-06
2021-01-21
天山创新团队项目(2020D14037);国家自然科学基金项目(51865058);自治区自然科学基金项目(2019D01A45);2017年自治区“天山雪松计划”(2017Q19)
张佳喜,研究员,博士生导师,主要从事循环农业技术与装备研究。Email:13899961137@163.com
10.11975/j.issn.1002-6819.2021.07.006
S225.91+2
A
1002-6819(2021)-07-0043-10
张佳喜,郜周明,蔡佳麟,等. 横轴对辊式棉秆起拔装置设计与试验[J]. 农业工程学报,2021,37(7):43-52. doi:10.11975/j.issn.1002-6819.2021.07.006 http://www.tcsae.org
Zhang Jiaxi, Gao Zhouming, Cai Jialin, et al. Design and experiments of cotton stalk pulling machine with horizontal-counter rollers[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(7): 43-52. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.07.006 http://www.tcsae.org
