基于PLC的转运移位床控制系统设计
2021-06-29戴飞铭范清荣王晶晶
戴飞铭,范清荣,王晶晶
(福州职业技术学院 机电工程学院,福建 福州 350108)
0 引言
过床移位是病患术后常见的护理工序,目前临床上经常是2人及以上的护理人员共同采用简易辅助装置(过床器)、人工等方式完成过床,存在护理强度大、操作不慎可导致患者二次伤害以及医护人员与患者交叉传染等隐患因素[1-2].因此为了解决以上问题,提高病患过床移位的平稳性以及降低医护人员的工作强度和操作失误风险,本产品提出采用西门子PLC控制技术,全程监控手/自动控制转运移位床的升降、滑移、倾斜以及回收等功能,并进行了步进电机启停的加减速优化,实现人机友好,保证病人静态移位,提高安全平稳性,提升移位过床效率,可为相关领域的企业开发先进的过床设备提供有效的理论技术支持.
1 工作原理及控制要求
1.1 工作原理
智能转运移位床的控制方案设计由平移、同步带旋转移位、升降及倾斜4大结构模块和控制系统组成.平移模块的设计方案采用定位精度及安全性高的带抱闸步进电机,并通过丝杆螺母副带动直线圆柱导轨驱动同步带移位模块前后运动,滑台配有限位保护开关.同步带旋转移位模块设计采用带抱闸步进电机,通过变速器驱动同步齿形带旋转运动,实现病人在同步带上前后静态移位,传动平稳,消除振动.升降模块采用步进电机+涡轮蜗杆驱动螺杆转动而控制床体的剪叉式升降动作,该方案利用蜗轮蜗杆的自锁功能和双向同步螺杆装置,保证升降的安全性、平稳性.倾斜模块采用高效的电动液压驱动设计,配有位置和速度传感器,可自动匀速抬升,放油卸荷可根据工况提前设置.其设计工作原理(如图1所示)为:a.升降模块(Z轴),转运移位床与病床水平紧靠,高度位置固定→b.平移模块(X轴),步进电机带动滚珠丝杠副驱动圆柱导轨滑移模块并带动同步带旋转模块至病床中间处→c.同步带旋转移位模块(B轴),启动同步带旋转运动,带动病人移位至两床接缝处→d.倾斜模块(W轴),控制电动液压驱动装置将病人轻微倾斜,利用病人自重增加病人与病床的静态摩擦力,收回滑移转运组件,归位→完成转移.
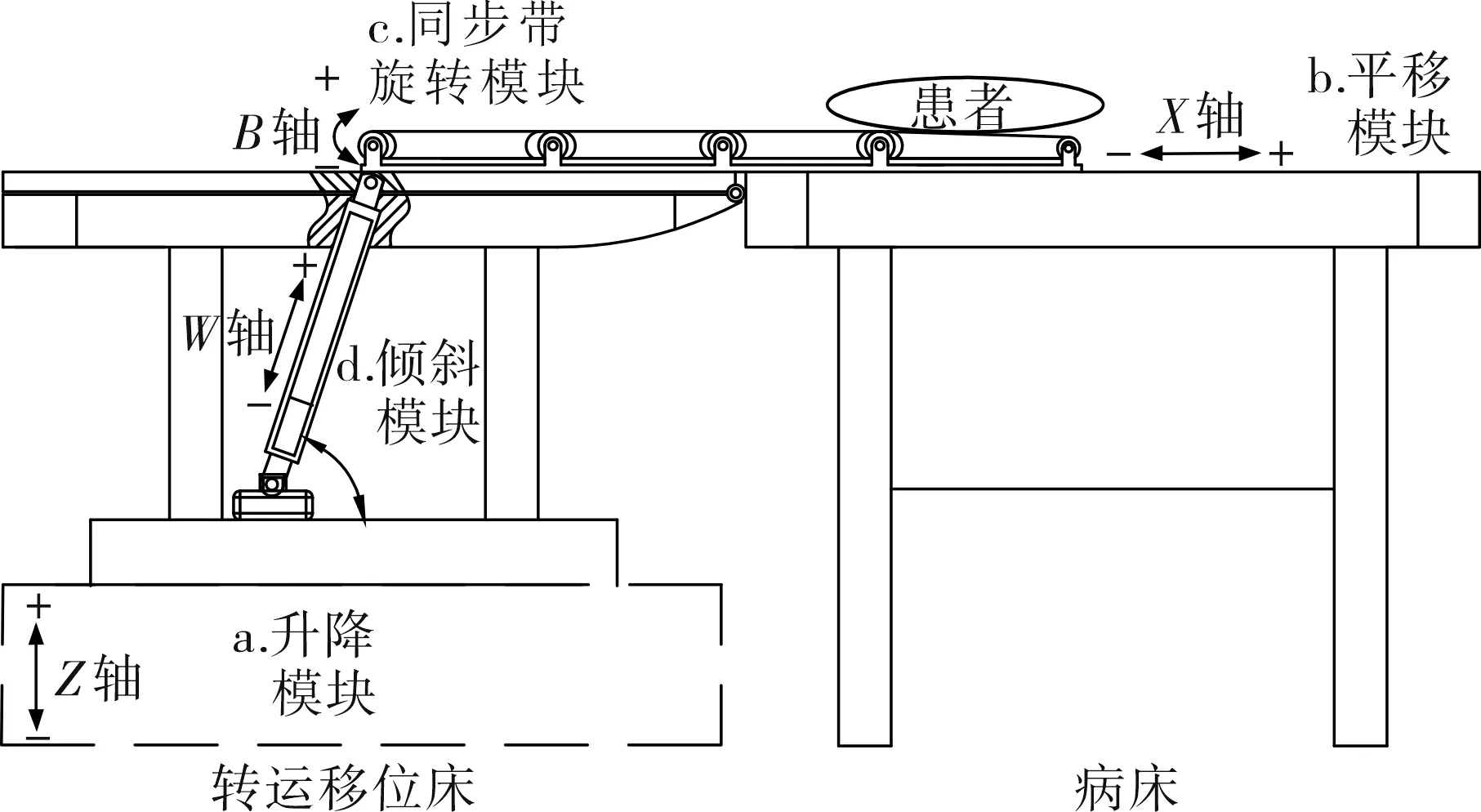
图1 转运移位床工作原理
1.2 控制要求
转运移位床配套3组步进电机和1组电动液压装置,可手动或自动依次完成4道移位工序,同时配套相应的传感器、自锁装置等,并可根据过床实际状况要求调节各项工作参数,配有故障自诊断功能.具体控制要求如下所示:
1) 设备3组步进电机都配有刹车抱闸,一旦驱动器或电机出现故障、断电,驱动器会立即刹车并报警,电机停止转动,刹车抱闸将机构固定在安全位置.
2) 设备4个移位工序都可独立调节其速度、位移距离等参数.
3) 设备各工序都配有限位开关,升降模块配有上下2处红外线位置传感器,可根据病床高度自行检测,完成水平找正.
4) 内部设置有自动监测装置,当模块出现故障(漏电、乱码等问题)会自动切断电源并锁死,保障患者与护理人员的安全.
5) 产品安装应急按钮,过床或其他过程中遇突发状况,可紧急按停设备.
6) 控制系统能够自主进行设备系统故障诊断存储,并在人机界面上进行显示.
2 电气控制系统设计
该转运移位床的控制流程如图2所示.设备点击开始按键,通电后会自动校验是否初始化,初始化后自动进入选择模式程序[3-4].运行模式分为手/自动2种控制方法,手动模式可独立选择4个运动轴Z、X、B、W中任何一轴,具备启停、回零、点进、点退、加速以及减速控制功能,加减速控制采用无级调速方式.当手动控制结束后,可选择各轴的回零功能和系统总复位回零功能.当选择自动控制模式,设备会依次顺序完成升降、平移、旋转、倾斜以及回收工序.自动模式结束后,经确认是否正常完成,收到信号自动归位回零,并停止运行后,控制结束系统复位.

图2 转运移位床控制流程
2.1 硬件构建
PLC作为控制系统运行的核心部件,其机型的选择就显得重要.S7-200 Smart作为西门子公司旗下一款小型PLC,其性价比高,稳定性好,具备强大的编程及逻辑运算能力,且其单体I/O点数最高达60点,基本满足各种小型设备的控制需求.因此,智能转运移位床采用1台S7-200 Smart PLC为控制器,搭配3台24 V直流大扭矩步进电机和1台电动液压驱动装置,并连接各模块传感器装置来完成对控制系统的监控检测.其中,步进电机移动控制信号采用脉冲信号,移动位置采用脉冲数来控制,移动速度脉冲频率来控制.单个S7-200 Smart PLC具有3轴控制能力,将给定指定代码和数据发送给步进驱动器,控制1 台升降模块(Z轴)步进电机、1 台平移模块(X轴)步进电机和1台同步带旋转模块(B轴)步进电机的正转、反转、加速、减速或停止功能,另外通过通/断输出信号控制1台电动液压升降设备,其PLC电气控制线路如图3所示.同时在各个模块上都配有针对该工况的检测/感应传感器,其中传感器与PLC输入端相连接,传感器输出信号均由PLC读取.在旋转模块(B轴)上,使用压力传感器对人体的传送位置进行移动定位,保证人体的准确位置停止.触摸屏选用昆仑通态TPC7062K型号,通过串口RS485与PLC连接,该型号性价比高,操作性好.
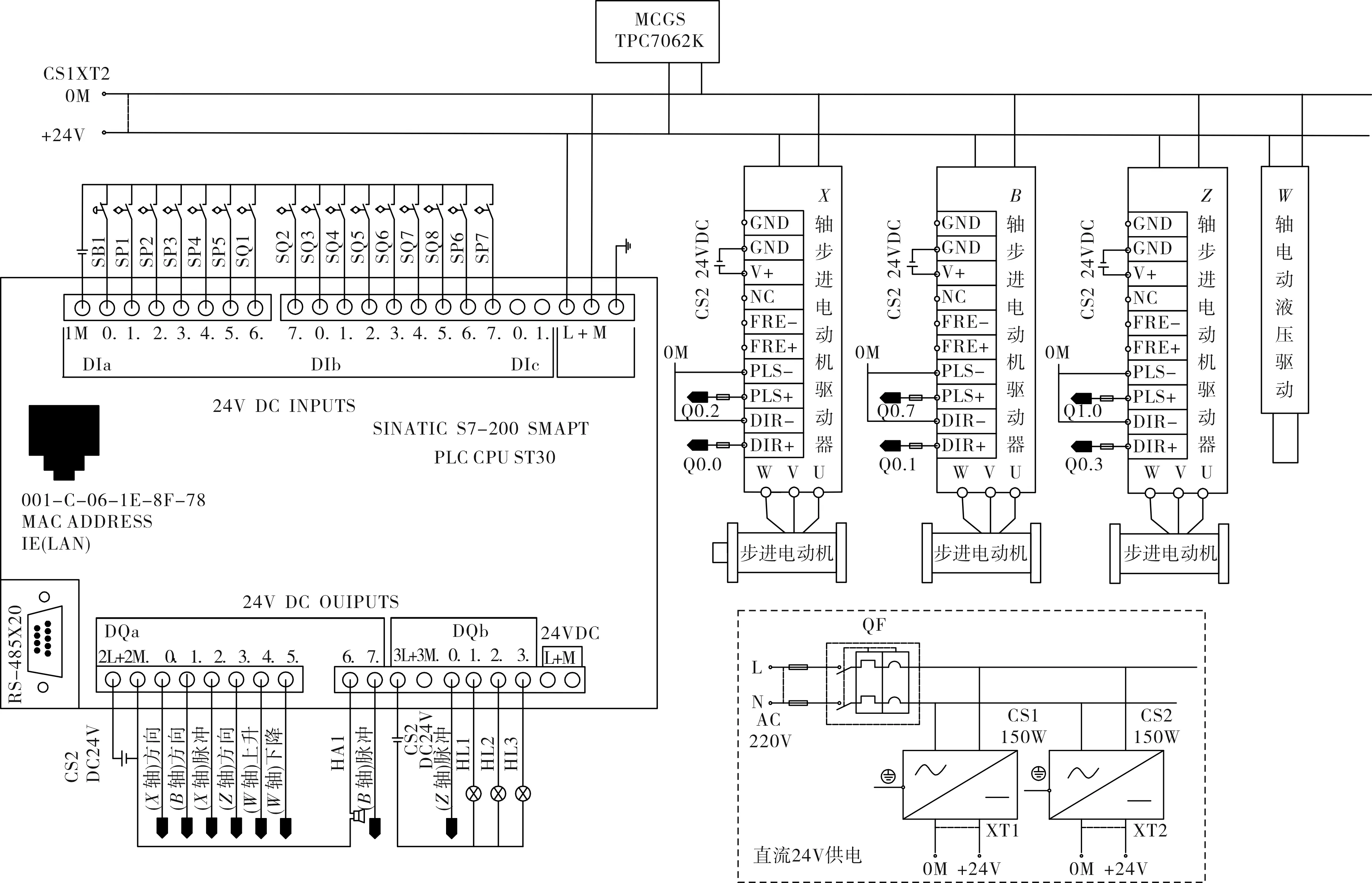
图3 转运移位床PLC控制电路
2.2 I/O口分配
设备采用西门子S7-200系列PLC,根据模块特性和功能要求以及控制系统中I/O口的要求[5],其I/O口资源分配如表1所示.
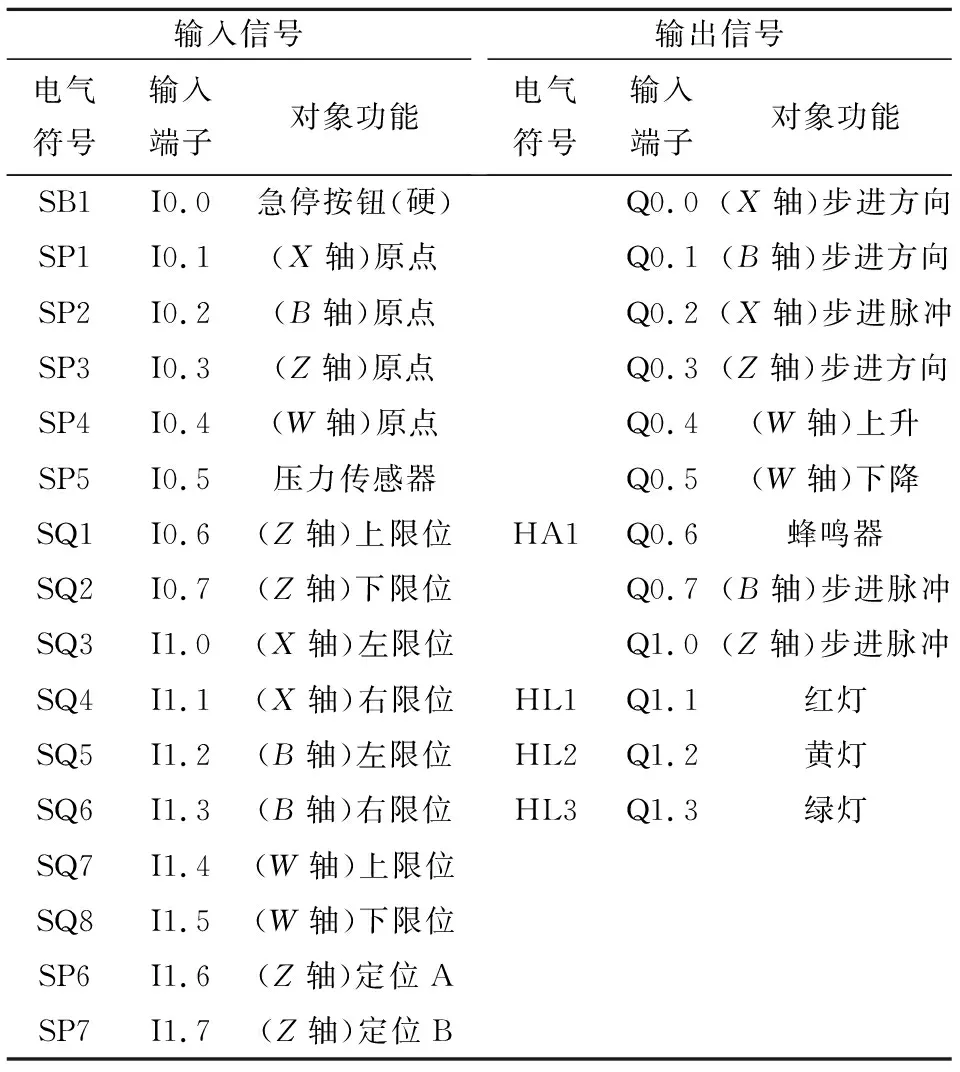
表1 PLC的I/O口资源分配
2.3 PLC程序编写
转运移位床的PLC程序设计根据模块化设计思路分成手/自动控制2大块:手动控制模块是可以单步控制每个动作模块,实现每个独立运动流程的执行;自动控制是由主程序调用(自动模式)各个子程序模块,是应用步进指令将每个运动流程按照指定的逻辑顺序循环扫描,根据传感器信号自动触发各个运动流程.设备PLC程序是通过西门子编程软件STEP 7-Micro/Win Smart编写,并采用常用的梯形图编写形式,部分控制程序如图4所示.该流程设计程序结构逻辑清晰,顺序合理,便于程序的在线检查更改、监控及调试,有助于各个模块的单独控制与自动控制[6-7].
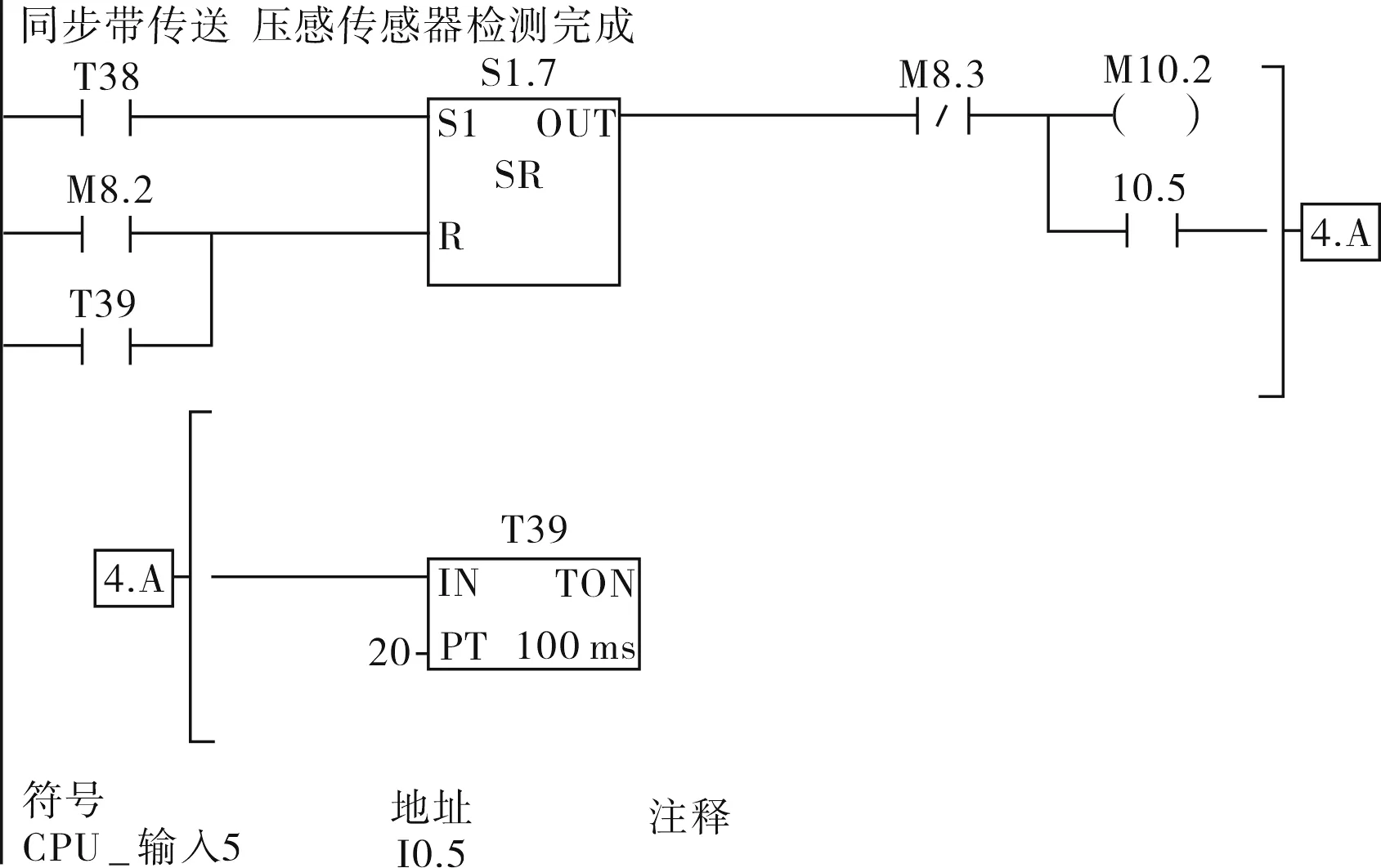
图4 转运移位床部分PLC程序
2.4 触摸屏控制界面
设备控制系统采用MCGS-TPC7062K工业触摸屏作为人机界面接口,可将编译好的程序以图形化显示出来并实时监测其运行状态,如各轴的运行过程中的数据变化和报警信息等.通过其自带的组态软件编辑设计其控制界面,包含主控界面和参数设置界面.触摸屏通过以太网RS232 IPP协议串口与PLC 通讯连接后,可直接在触摸屏上进行操控PLC.在参数设置界面,可以设置各个模块电机及驱动装置的自动进给速度、手动进给速度、回零速度和软行程极限,也可以在控制界面倍率加减速操作,同时可显示监测PLC内部运行数据及状态[8-9].
转运移位床控制系统的主控制界面(见图5)是人机友好互动的主要控制窗口,主要包括系统启动初始化、停止、急停、运行模式选择、状态显示界面、加减速按钮操作以及运行参数显示等.
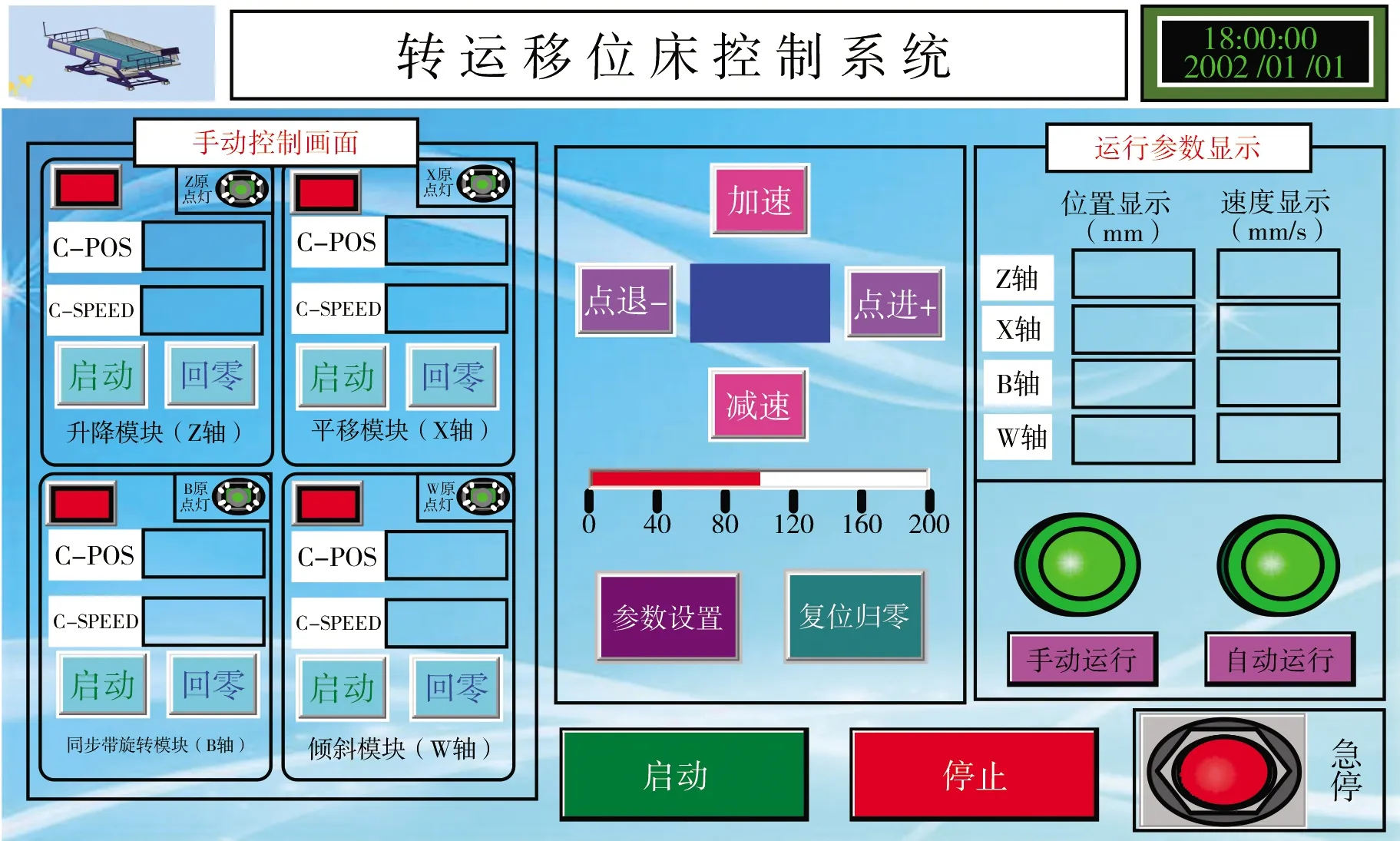
图5 转运移位床触摸屏控制界面
参数设置界面如图6所示,是允许操作人员根据不同工况及其运行环境和护理方法,设置相应的参数,以满足不同应用场合的要求.该模块包括系统设备各轴应用参数及电动液压参数的设置,包括了运动、安全等参数.运动参数主要包括点动速度和回零速度.安全参数包括了正、反向软行程和最大运行速度以及警告提醒等.

图6 转运移位床触摸屏参数设置界面
2.5 PLC的启动加减速控制
步进电机由于价格便宜、精度高、无累积误差被广泛应用于开环控制系统上,但步进电机也存在输出转矩随着脉冲频率的上升而下降的问题.当电机启动频率升高,其转矩对应降低,带动载荷的能力也相应下降,从而会造成启动时易失步和停止时易过冲[10-11].因此,为减少步进电机启停时的机械振动对病人过床的影响,需要在S7-200 Smart的运动向导组态中对电机进行加减速控制(如图7所示).根据实际工况测试调整电机启动/停止速度(SS_SPEED)、加速时间(ACCEL_TIME)、减速时间(DECEL_TIME)和急停补偿等参数.
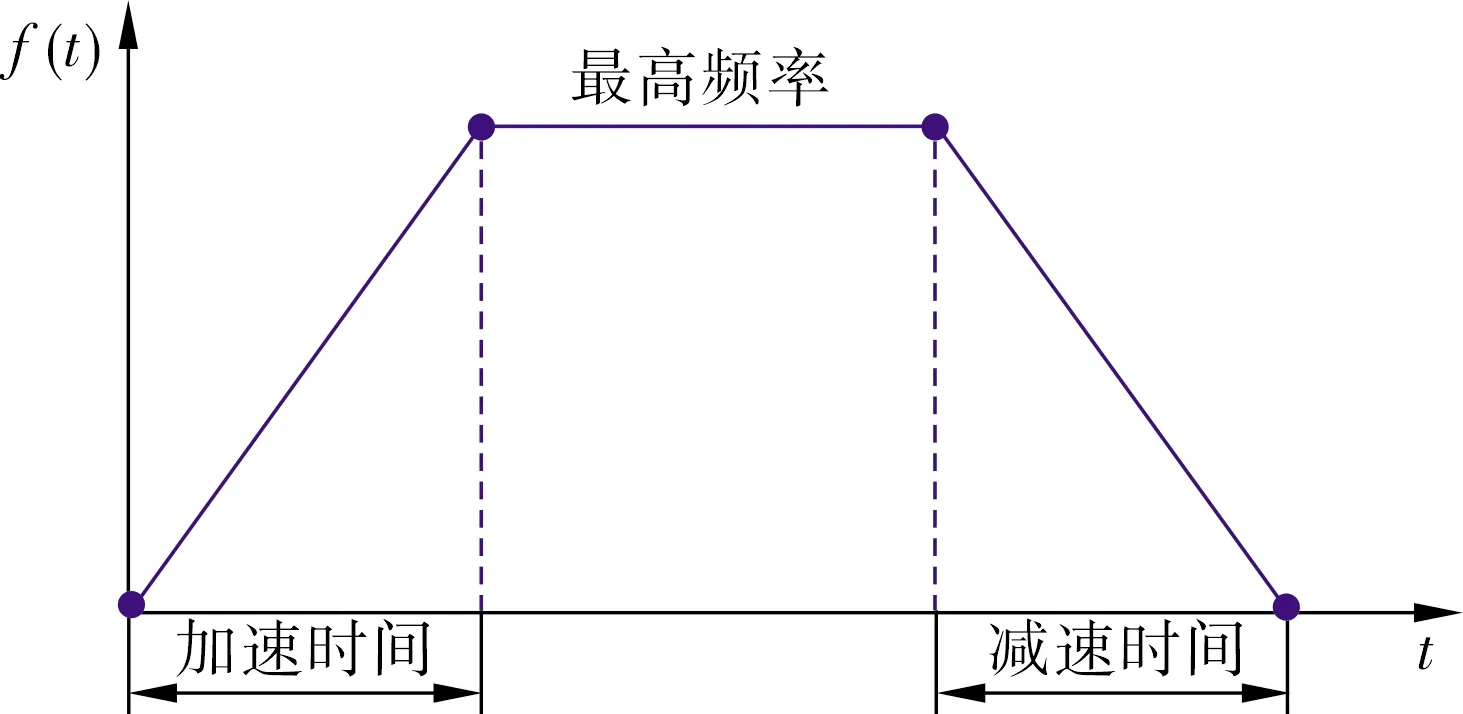
图7 PLC加减速脉冲输出曲线
因此,在确定最大转速、位移和启停速度、加减速时间以及急停补偿等参数后,可输出相对平稳的启停加、减速脉冲信号,从而发挥步进电机的特性,减少了加、减速过程中对患者的振动冲击,提高了过床的稳定性和可靠性.
2.6 转运移位床试验平台搭建
转运移位床控制系统试验平台(如图8所示)由单个S7-200 Smart ST30 PLC、2个24 V直流开关电源、3组执行单元(驱动器+57型步进电机)、3个轴传感器以及触摸屏控制组成.其中,电动液压升降装置由单指令信号控制,设置在触摸屏控制界面上模拟显示.验证过程为:预先要把控制操作的指令程序通过输入设备输送到PLC内存中,和触摸屏用网卡接口(RS232)进行局域网通信连接,触摸屏输出控制信号给PLC控制每一条指令进行操作,达到控制电机旋转升降和反馈传感器信号的目,并根据静态移位运动及其抑振要求,验证1组使步进电机平稳加、减速的参数,减少步进电机启停时机械振动对患者静态过床的影响.

图8 转运移位床试验平台
3 结语
在分析了患者过床临床护理准则要求背景下,研发设计一款基于西门子PLC控制的患者静态移位的器械,在其总体结构设计的基础上,进行了控制系统软硬件搭建.对系统输出、输入信号进行分析,完成I/O资源分配;对设备控制流程进行分析,编程优化PLC程序.最后,在试验平台上进行了试验验证,为样机制造提供有效的理论数据.
