飞行区场面混杂系统刮蹭风险评估研究∗
2021-06-29周语邵荃王浩
周语 邵荃 王浩
(南京航空航天大学民航学院 南京 210016)
1 引言
机场飞行区场面是一个混杂的局域系统,跑道、滑行道、机坪布局错综复杂,系统中的航空器、人员、车辆、设施设备等行为具有复杂性、动态性、突发性和不确定性,均在场面运行过程中不断进行动态交互作用,导致整个飞行区的运行状态相当复杂。目前,极速增长的场面交通量与有限的场面资源不匹配的矛盾日益突出,使得航空器、保障车辆在场面运行过程中的冲突次数增加,频繁出现航空器刮蹭、车辆刮蹭等不安全事件,飞行区场面混杂系统的刮蹭问题已成为保障机场地面滑行安全的重点问题。
在民航安全领域,国内外专家学者对刮蹭问题研究较少,但针对与刮蹭相近的航空器碰撞问题已经做了许多研究。Peter Brooker[1]构建EVENT模型以确定航空器纵向碰撞风险;徐超等[2]建立了基于冲突点的交叉跑道碰撞风险模型;张兆宁等[3]构建了基于随机微分方程的碰撞风险评估模型;刘单单[4]建立了运输航空器与通用航空器碰撞风险预测模型;曾鑫[5]对飞行区防碰撞进行了深入的分析研究;李茹[6]提出了一个较为科学且系统的复杂机场航空器场面运行安全分析框架;位放[7]针对首都机场缩小进近雷达间隔及航路交叉点这两个对象的碰撞风险评估问题进行了研究;朱代武等[8]将目视误差、导航误差作为影响因素,从三个维度来分析平行进近时的两机碰撞风险。针对道路车辆碰撞问题,学者们同样进行了深入研究:Mclaughlin等[9]提出了一种以概率内涵为依据的道路交叉口车辆碰撞动态风险估计模型,适用于道路交叉口车辆防撞系统;陆建等[10]建立了基于碰撞时间的追尾风险概率模型;李英帅[11]建立了换道行为冲突风险预测模型及两难区碰撞风险预测模型;项红玉[12]提出了面向安全预警的驾驶员意图识别和风险评估方法。
另外,由于道路车辆碰撞涉及到驾驶员的认知行为,所以一些学者研究了驾驶员在驾驶过程中的行为特征。余韬[13]在风险平衡理论的框架下设计了一系列实验,具体分析了驾驶员的“感知-认知-反应”过程,并采用模式识别方案预测交通事故的发生;Kumagai Toru等[14]利用动态贝叶斯网络对驾驶人将来的行为进行了预测分析。
现有文献针对飞行区内航空器或车辆地面碰撞风险的研究较少,更缺乏将飞行区场面运行中航空器与车辆相结合的混杂系统整体刮蹭风险的专项研究。另外,已有的碰撞风险模型极少考虑驾驶员对航空器、车辆运行动态的主观干预过程,忽视了人为因素对风险的影响。飞行区内航空器、车辆之间发生刮蹭均会影响到航班正常运行,还可能破坏航空器或保障车辆的结构和设备,甚至导致人员伤亡,造成严重后果。为了更为直观地掌握航空器、车辆在飞行区场面运行过程中的安全性,需要提出科学、精确的风险分析方法,基于人为因素构建飞行区场面混杂系统刮蹭风险模型,量化风险以有效评估场面安全。
2 飞行区场面混杂系统刮蹭风险模型
交叉口是飞行区场面交通系统的重要组成部分,交叉口使来源于不同方向的航空器、车辆等交通流汇合、交织、分流,交通态势较为复杂,所以交叉口是场面事故频发的区域。航空器各自直行穿越滑行道交叉口时,若两航空器在交叉口运行过程中的间隔过小,则容易发生刮蹭。同理,车辆在穿过行驶道路交叉口过程中也极易产生刮蹭。另外,航班起飞前,机坪上停靠的航空器需要地面车辆进行服务保障,由于涉及车辆较多,较容易引发车辆与航空器刮蹭事故。因此,本文针对上述三种主要类型的飞行区地面刮蹭事故进行风险分析与研究,并在考虑人为因素的基础上建立飞行区场面混杂系统整体的刮蹭风险模型。
2.1 航空器地面刮蹭风险
本文重点考虑较为复杂的非直角滑行道交叉口,如图1所示。图中阴影部分是航空器可能发生刮蹭的冲突区域。在计算刮蹭风险值时,需要考虑三种临界状况:1)先通过的A航空器机翼与后通过的B航空器机头刮蹭;2)后通过的B航空器机翼与先通过的A航空器尾翼刮蹭;3)两航空器在进入交叉口前因距离过小而两机翼翼尖发生刮蹭。假设航空器A和B几何尺寸相同,机身长为l,翼展长为w,两滑行道交叉角度为θ,图中长为w·cscθ、高为w的平行四边形即为可能发生刮蹭的冲突区域Ω。

图1 航空器在滑行道非直角交叉口行驶
假设前航空器A开始以速度va进入冲突区域Ω时,后航空器B的机头距离冲突区域Ω的边界距离为s0,并以速度vb0运动。当航空器A通过冲突区域Ω时,若航空器B也进入冲突区域Ω,则两航空器发生刮蹭。航空器A通过冲突区域所用时间为,在这段时间内,航空器B行驶路程为sb=vb·t0。
航空器发生刮蹭的临界条件为sb<s0,可进一步演化为

设A、B的速度分别服从正态分布:Va~N(vfa-

根据已知条件可得到kv的值,U服从正态分布:假设两航空器发生刮蹭的概率用P航表示,P航=P(U>0),则:

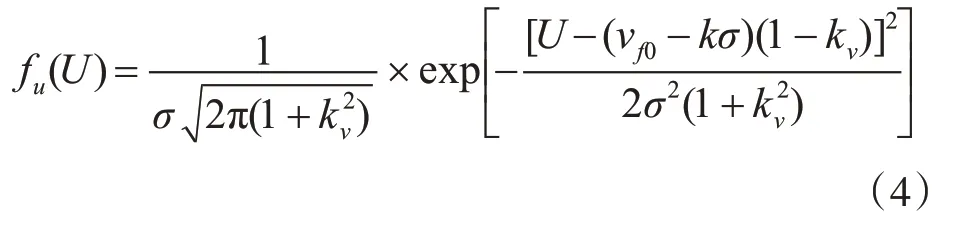
其中fu为两航空器速度差的概率密度:fu(U)=设这两架航空器为同种类型,且行驶速度相同,令vfb=vfa=vf0,kb=ka=k,σb=σa=σ,则:
2.2 保障车辆地面刮蹭风险
飞行区内有许多为航空器提供后勤保障的机场专用车辆,包括客梯车、行李传送车、飞机牵引车、食品车、加油车等,因此飞行区设置了专用车辆行驶道路。车辆行驶道路间的交叉口通常为垂直交叉口,如图2所示。
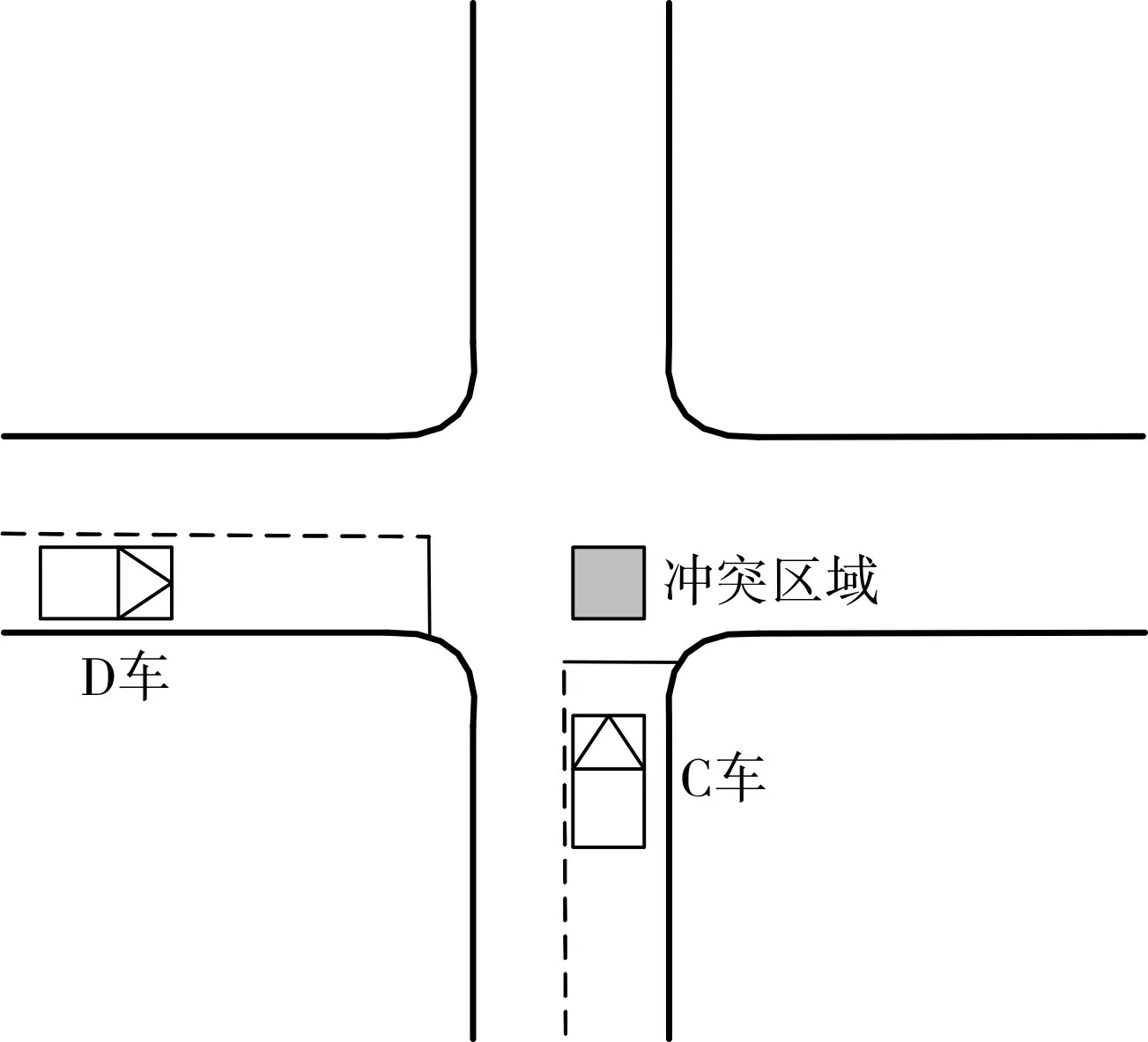
图2 车辆在道路交叉口行驶
设两车分别为C车与D车,图中阴影部分是两车在交叉口可能发生刮蹭的冲突区域。C车与D车不发生交汇的临界条件是C车到冲突区域时D车已通过,或C车离开冲突区域时D车还未到。满足两个条件之一则不会发生刮蹭,若两不等式均不满足则会发生刮蹭事故。因此,两车发生刮蹭的风险概率P车为
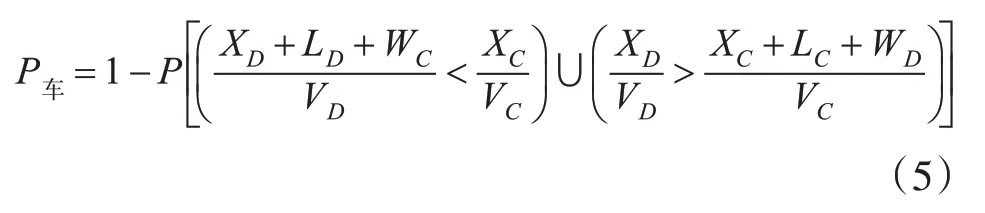
其中,X为车头距冲突区域的距离;L为车辆长度;W为车辆宽度;V为车辆由检测点到达冲突区域的平均速度,是一个随机变量。

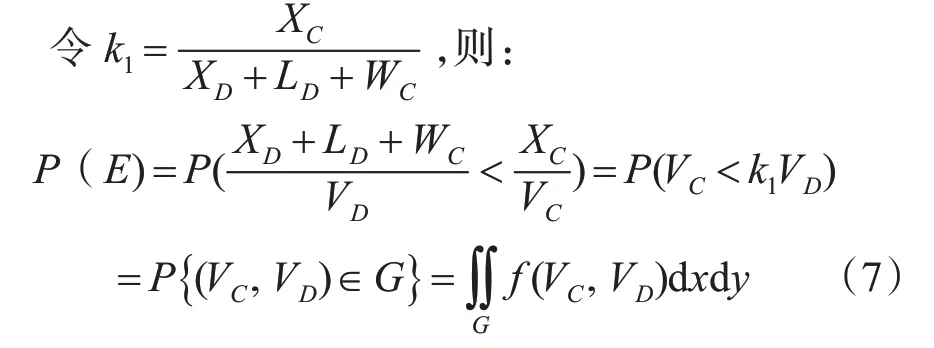
设VC、VD为均匀分布,则
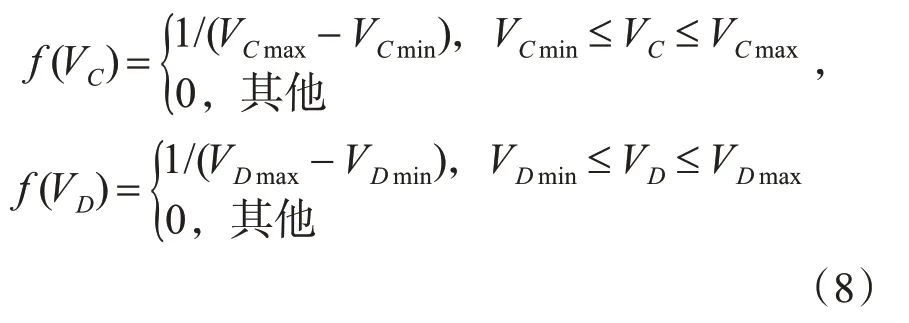
f(VC)、f(VD)分别为VC、VD的概率密度函数,G为VC、VD构成的坐标系中满足VC<k1VD及各自变化范围的区域,SG为该范围的面积。
VC、VD分布范围受到当前速度下最大加速度和减速度的影响,且与位置XC、XD有关。对于C车,加到最大速度的距离为2aCmax。若XCacc>XC,则只存在加速过程;若XCacc≤XC,则存在加速和匀速两个过程,时长分别为tC1=(vCmax-vC0)/aCmax,tC2=(XC-XCacc)/vCmax。则有
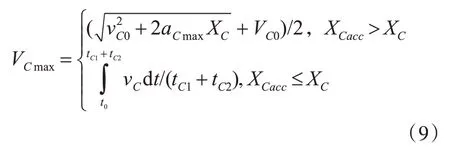
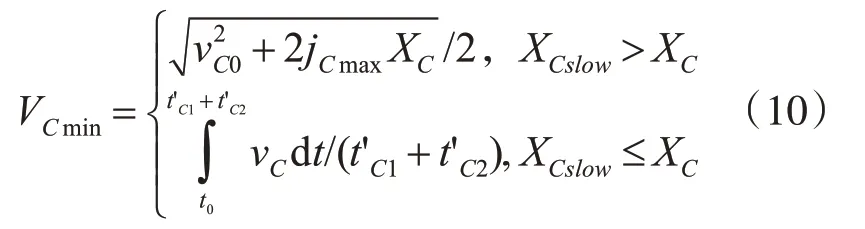
其中,aCmax为C车的最大加速度,vCmax为最大速度,vCmin为最低速度,jCmax为最大减速度,vC0为C车的初速度。
同理可计算f(VD)与P(F),最后通过式(6)计算出两车在车辆行驶道路交叉口刮蹭风险概率P车。
2.3 车辆与航空器间的刮蹭风险
本文对运行的保障车辆与停靠的航空器之间的刮蹭事故进行风险分析。首先,根据文献[6]可知,在跟驰情形中,车辆间不发生刮蹭所保持的最小安全间距即刮蹭阈值DH为

其中,SL、SF分别表示前车、后车的制动距离,l为前车的车身长度。
两车完成制动后,前后之间仍留有一定的净距,令d为前车车尾到后车车头的安全净距,由此可得潜在冲突阈值DPC为

在考虑人为因素对驾驶员的影响前提下,两车行驶过程中的带刹车制动过程包含了驾驶员反应过程、制动系统响应过程及持续制动过程,最终可求得跟驰行驶潜在冲突阈值:

vL和vF分别为前车和后车的初始速度,aLdec和aFdec分别为前车和后车的制动速率,tr为后车驾驶员的反应时间,td为制动系统响应时间。
在场面运行过程中,假设一辆车在机坪上的行驶速度满足正态分布V~N(μ,σ2),这辆车与停靠的航空器初始间距为L,首先根据式(13)求出跟驰行驶冲突阈值L0(前车初始速度为0),再根据式(11)求出刮蹭阈值L1,这辆车的行驶距离S=,由此可求出运行车辆与停靠航空器刮蹭概率P车航为

2.4 基于人为因素的刮蹭风险模型
人为因素是引起交通事故的主要原因。在飞行区场面运行中,有时航空器或车辆之间的距离是相对安全的,但由于驾驶员对速度把控不当、对位置距离的理解产生偏差、状态决策不当等,在做出驾驶行为前的主观感知和判断选择过程出现失误,就会导致刮蹭事故发生。因此,对于飞行区混杂系统刮蹭风险的分析建模不仅要从距离出发,还需考虑驾驶员对航空器、车辆运行动态的主观干预过程,加入人为因素对刮蹭风险的影响。
在第二学段中,6个版本的“面积公式”知识点均处于五上;北师版的“高”和“底”两个知识点与“面积公式”知识点编写在同一册的同一单元,而与“平行四边形的概念”处于不同的册别.冀教版、苏教版、青岛版和人教版4个版本将这两个知识点与“平行四边形的概念”编写在同一册的同一单元,而与“面积公式”处于不同的册别.北京版综合了上述两种情况,将这两个知识点与“平行四边形的概念”“面积公式”编写在同一册的同一单元.
基于人为因素来考虑,刮蹭风险模型本质上具有一定的主观性,所以建模过程中必须考虑驾驶员的影响因素。在基础的人的可靠度模型中[15],通常反映了人的可靠性随时间变化的函数:
其中,E(t)为行为错误率,是时变函数或常量。通常取E(t)为Weibull概率密度函数,即:

其中,β为形状参数,η为尺度参数。将式(16)代入式(15)可得:

但这并不能反映人员可靠度与人员状态间的联系。因此,将式(17)中的变量t由虚拟尺度变量ρ代替,该变量由驾驶员的状态来决定,从而构建驾驶员的可靠度模型:
基于上述提出的驾驶员可靠度模型,构建飞行区场面混杂系统刮蹭风险的人为因子模型:
其中,k(Ξ)为驾驶员状态向量Ξ的函数,用于表征人为因素对刮蹭风险的影响。
对于人为因子模型,输入变量为驾驶员的业务技能水平、驾驶经验、生理状态等多个变量,其取值范围均为[-1,0],“-1”表示最恶劣的情形,“0”表示最理想的状态。由于人为因素具有不确定性,所以可选择取值范围内随机生成的参数向量进行多次仿真。通常情况下,尺度参数取η=‖Γ‖1,形状参数为 β=1。

其中,N为某时刻某机场飞行区正在滑行的航空器总架次,M为某时刻某机场飞行区正在行驶的车辆总数,Q为某时刻某机场飞行区机坪上运行的保障车辆总数。
3 系统仿真与分析
本文利用AnyLogic软件搭建仿真场景,根据某日某机场高峰小时的航班计划,对该机场飞行区场面运行过程进行仿真,用本文提出的飞行区场面混杂系统刮蹭风险模型进行风险概率的实时评估,并对该机场的场面运行安全进行分析探讨。
3.1 参数设置及数据获取
1)航班时刻表
在AnyLogic仿真平台中读取的航班时刻表选自某机场某日高峰小时的航班计划,如表1所示。
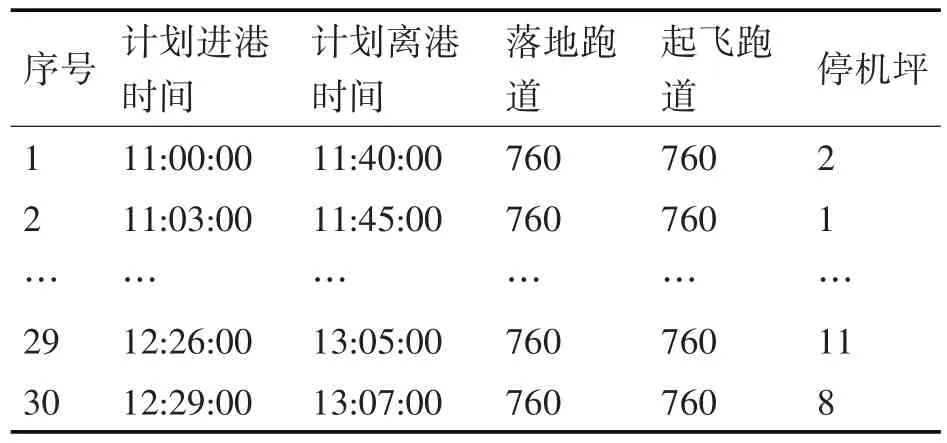
表1 某机场航班时刻表
2)飞行区场面混杂系统刮蹭风险模型参数
航空器在飞行区场面滑行时的速度是动态变化的,本文参照文献[16]使用正态分布近似表示航空器滑行速度。设置飞行区场面混杂系统刮蹭风险模型中的相关参数如表2所示。

表2 航空器地面刮蹭风险相关参数
3.2 仿真实验及结果分析
为了探究人为因素对刮蹭风险的影响作用,本文将分别对考虑人为因素以及不考虑人为因素的刮蹭风险模型进行对比仿真实验。首先,在不考虑人为因素的情况下,根据本文设置的仿真场景,在AnyLogic仿真平台中输入某机场高峰小时的航班计划表及刮蹭风险模型的各项参数,实时统计航班及保障车辆的运行信息,根据航空器及车辆的位置坐标和滑行速度,运行程序并每秒输出一次飞行区混杂系统刮蹭风险概率。对刮蹭风险概率仿真进行多组实验,统计实验结果并计算平均值,如表3所示。
然后,对于人为因子模型,本文设定输入变量为驾驶员的业务技能水平、驾驶经验、生理状态及滑行环境干扰,用Matlab软件随机生成[-1,0]范围内的参数,构成不同的驾驶员状态向量,用于反映人为因素的不确定性干扰。与上述实验同理,用AnyLogic运行程序对刮蹭风险概率仿真进行多组实验,统计实验结果并计算平均值,如表3所示。
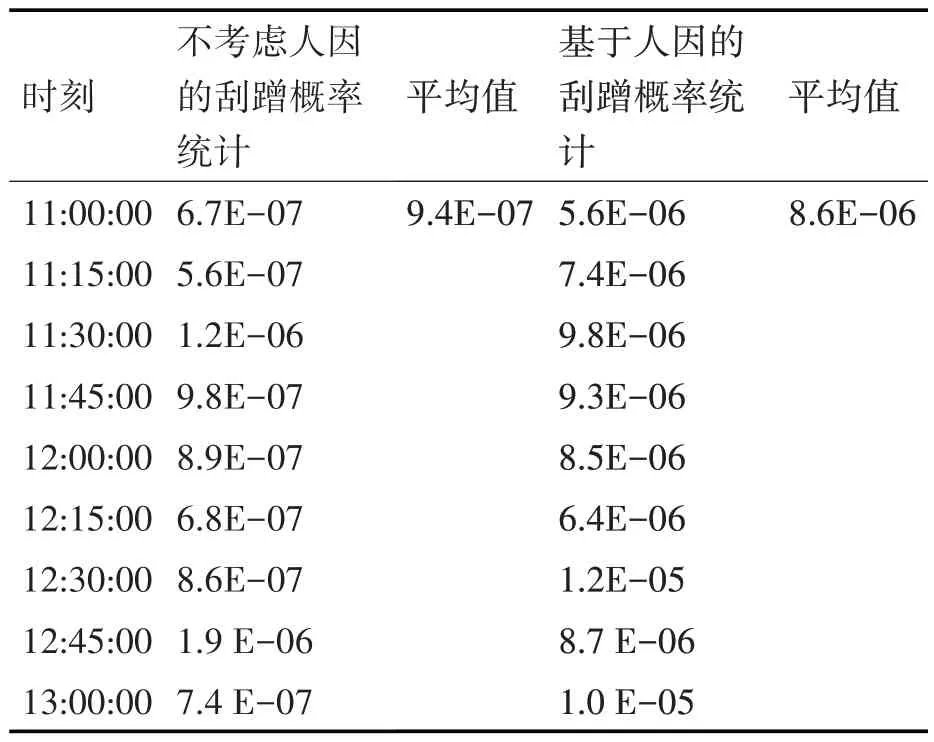
表3 两种情形下刮蹭风险概率统计与计算
对比结果可知,基于人为因素不确定性影响计算出的该机场飞行区混杂系统刮蹭风险为P总=8.6E-06,而不考虑人为因素情况下计算出的剐蹭风险为P总'=9.4E-07,通过对机场实地考察、专家走访和历史资料统计,实际出现飞行区剐蹭事故的频率更接近于前者,所以该结果更具有实际意义,且能提供风险防控方向的参考。按照风险概率1.0E-05以上为高风险,1.0E-05~1.0E-08为中等程度风险,1.0E-08以下为低风险的标准,评估出该机场飞行区场面混杂系统刮蹭风险为中等程度风险,需加强风险防控措施以降低飞行区刮蹭事故风险,改善机场场面滑行安全状况。尤其可以从驾驶员培训的方面多加防范。
为了更好地保障飞行区场面安全,需要找出场面运行中的航空器风险点,针对这些风险点来有效制定风险防控措施。以最小间隔距离60m来计算该机场飞行区航空器的拥堵点,在某一时刻该机场飞行区场面运行情况如图3所示。图中用矩形框表示的航空器距离较近,其所在位置即为飞行区场面风险点,基本出现在图3显示的高风险区域内。
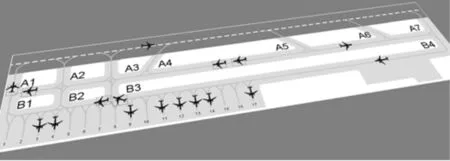
图3 某机场飞行区场面混杂系统刮蹭风险点
4 结语
本文构建了基于人为因素的飞行区场面混杂系统刮蹭风险模型,主要完成的工作:1)针对航空器地面刮蹭、保障车辆地面刮蹭、机坪车辆与停靠航空器刮蹭这三种主要类型的场面刮蹭事故进行风险分析,并在安全距离的基础上考虑了驾驶员的主观人为因素,基于人为因素的不确定性影响建立了飞行区混杂系统整体的刮蹭风险模型;2)采用AnyLogic软件建立了机场飞行区场面刮蹭风险评估仿真系统,对刮蹭风险模型进行验证,将考虑人为因素影响与不考虑人为因素的剐蹭风险模型进行对比实验,评估出某机场飞行区刮蹭风险水平,得到该机场飞行区场面的风险点,为刮蹭风险防控及场面安全管理提供依据。