基于机器视觉技术的工件尺寸测量实训教学项目设计
2021-06-28张苏新韩仲洋黄天宇张云昊
张苏新 韩仲洋 黄天宇 张云昊


摘 要:通过对机器视觉硬件电路的设计,同时使用VisionPro软件进行工件尺寸测量的编程设计,完成了工件尺寸测量实训教学项目的设计,具体完成了工件的长度、角度、孔径和直径的尺寸测量。该实训项目包含了工件测量的常用测量变量,对于通过VisionPro软件进行工件测量的教学具有良好的教学效果,能够让学生更好地掌握机器视觉检测的应用。
关键词:机器视觉;实训教学项目;VisionPro
中图分类号:TP391.41 文献标识码:A 文章编号:2096-4706(2021)01-0149-04
Design of Practical Teaching Project of Workpiece Dimension Measurement
Based on Machine Vision Technology
ZHANG Suxin,HAN Zhongyang,HUANG Tianyu,ZHANG Yunhao
(Suzhou Vocational University,Suzhou 215104,China)
Abstract:By the means of designing of machine vision hardware circuit,and making the programming design of workpiece dimension measurement by VisionPro software,the design of practical teaching project of workpiece dimension measurement is completed. For more,the dimension measurement of the length,angle,aperture and diameter of the workpiece are completed. The training project includes the common measurement variables of the workpiece measurement. Which has good teaching effect for the teaching to measure the workpiece through VisionPro software,and can make students better master the application of machine vision detection.
Keywords:machine vision;practical teaching project;VisionPro
0 引 言
傳统的工件尺寸测量都是检测技术员借助仪器仪表完成的。在测量过程中,检测人员会去触碰工件,采用不同的测量方法。流水线上不断重复的测量会令检测人员出现视觉疲劳,另外有一些检测是在恶劣危险的环境中进行,这些都会导致人工测量存在一定的误差,尤其是对高速运转的物体,不仅在检测时会产生较大的误差,同时还会使工件的生产工艺产生误差,导致生产出不合格工件。另外,人工检测需要聘用长期稳定的工作人员,而当前的人力成本又在不断增加,不利于生产成本的控制。随着机器视觉检测技术的快速发展,市场价格势必会逐渐降低,越来越多的企业会坚决果断地采用机器视觉检测代替人工检测,从而大大减少人力成本的投入,因此机器视觉检测将是大势所趋。
本文在设计的机器视觉硬件系统的基础上,设计了工件测量实训教学项目,实现了工件的长度、宽度、半径、圆心距和角度的尺寸测量,该实训项目基本包含了工件检测的常用测量变量,能够让学生更好地掌握机器视觉检测的应用。
1 机器视觉硬件构成
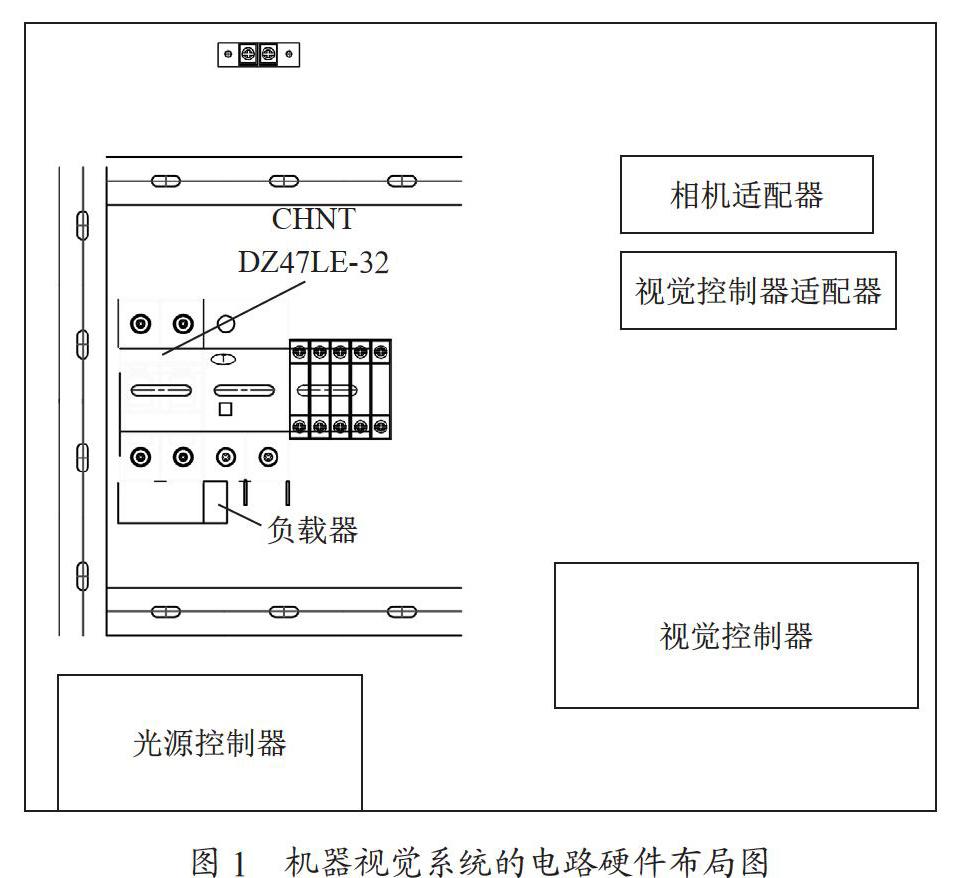
机器视觉系统的电路硬件布局图如图1所示,电控盘上分别安装了光源控制器、视觉控制器、视觉控制器适配器、相机适配器等元器件。
断路器主要是对电路220 V交流电压起通断作用,在机器视觉系统不工作时将其断电;在机器视觉系统恢复工作时再将其接通。在满足基本的过压和过流的同时,断路器自身带有漏电保护功能,当电路中存在漏电现象时,系统能够自动切断电路,保证了电路的稳定运行。由于需要有三路供电系统,因此配置了接线端子,将220 V交流电压分成3路分别对相机适配器、视觉控制器适配器和光源控制器供电。
工业相机不能直接连接220 V交流电,需要由24 V直流电压供电,因此相机适配器连接220 V交流电压,将220 V交流电压转换为24 V直流电压给工业相机提供电源。工业相机需要架在支撑架上方,将采集到的图像传递给视觉控制器。
同理,视觉控制器也需要24 V直流电压,因此通过视觉控制器适配器连接220 V交流电压,将其转换为24 V直流电压给视觉控制器提供电源。视觉控制器主要对整个系统进行控制,主要功能是将工业相机传递过来的数据进行处理,并将处理后的信号传递给PC上位机,提供给软件数据源,通过软件对数据进行进一步的处理。
光源控制器不需要通过24 V直流电压供电,可以直接连接220 V交流电。光源控制器主要调整光量的大小和光的颜色,可以实现对光亮度值的调整,同时可以提供两个通道,颜色上可以实现白光、蓝光和黄光的选择。
2 软件设计
2.1 VisionPro软件简介
VisionPro是一款用于具有挑战性的二维和三维视觉应用的计算机视觉软件,主要用于设置和部署视觉应用(无论是使用相机还是图像采集卡)。用户可以借助VisionPro实现各种功能,包括几何对象的定位、识别、测量和对准,以及针对半导体和电子产品应用的专用功能。
2.2 工件尺寸测量
测量工件尺寸时,图像采集系统在理想状态下采用背光打光方式,要求精确采集到黑白分明的产品轮廓,利用机器视觉硬件系统定位采集对象并对其进行测量。
2.2.1 凹槽和整体宽度
求两个四槽宽度和工件的整体宽度D1,D2,D3,其具体步骤为:
Stepl:打开VisionPro软件,双击CogJobl进入界面。
Step2:双击Image Souse打开界面,图像默认路轻为CIProgramFiesCogneVisinProOlmages.选择名为bracket std的文件,单击打开该文件。
Step3:关闭图像窗口,单击左上角的“运行”按钮。
Step4:单击“工具箱”按钮,双击“CogCaliperTool”添加卡尺工具,将Image Souse的Outputlmage连接到Cog-CaliperTool1的InputImage,进行数据传递,将图像传递到CogCaliperTool中。
Step6:双击“CogCaliperTool1”工具图标,进入Cog-CaliperTool工具界面。
注:对于出现的手柄,其中查找到的边缘与投影方向平行,沿着扫描方向,确定边缘两侧极性的变化。
Step7:调整手柄的大小和位置,边缘模式选择边缘对,边缘对宽度设置为50。其中,小于对比度阈值的边会被忽略,大于对比度阈值的边会被保留。过滤一半参数主要用于边缘筛选,其目的是消除噪声和增强峰值。单击左上角的“运行”按钮,从右上角的下拉菜单中选择LastRunInputlmage显示界面
Step8:在Caliper的结果界面可以查看相关结果信息,测量宽度的默认单位为像素,此时已经测出D1的大小为29.773 3 mm,如图2所示。
Step9:同理,可以测出D2、D3的距离,分别为30.020 5 mm和294.410 0 mm。
2.2.2 圆孔半径
求4个圆孔的C1,C2,C3,C4的半径R1,R2,R3,R4,其具体步骤为:
Step1:添加CogFindCircle,添加输入图像。
Step2:打开CogFindCircleTool,设置“卡尺数量”、“半径”等参数,角度范围设置为360°,然后将圆弧移动到待测圆孔位置。
Step3:运行结果。在LastRun.InputImage中可以看到工件上的圆孔被测量出来。单击结果,在结果界面可以看到圆心坐标及半径数据。
Step4:用同样的操作找出其他三个圆。在添加FindCircle工具时,可以选择在工具箱中添加FindCircle工具,也可以在已选工具列表中单击鼠标右键来复制FindCircle工具。在作业编辑界面将鼠标指针移动到识别出的标记上时会自动出现该处的相关数据。如图3所示为半径结果,R1=6.897 0 mm,R2=6.946 0 mm,R3=12.059 8 mm,R4=12.125 5 mm。
2.2.3 圆孔之间的距离
求C1、C2两个圆孔之间的距离D4,其具体步骤为:
Step1:添加CogDistanceCircleCircleTool工具,并将Image Source的Outputlmage连接到CogDistanceCircleCircleTool的InputImage,将CogFindCircleTooll和CogFindCircleTool2的Result.GetCircle(结果传送到CogDistanceCircleCircleTool的输入CircleA、CircleB,如图4所示。
Step2:查看运行结果。将鼠标移动到测量结果的标注线上可看到两圆孔间的距离数据,D4=131.580 0 mm。
2.2.4 工件内部夹角
求两个耳朵和中间横线的夹角A1、A2,其具体步骤为:
Step1:此案例的操作逻辑是,先使用找线工具找出三条边再分别使用量角工具量出被测角的角度。添加CogFind LineTool工具,并将Image Source的OutputImage连接到Cog FindLineTool的InputImage。
Step2:设置CogFindLineTool工具参数并运行。双击打开CogFindLineTool界面,在工件图像界面调整手柄大小并将其拖拽到需要识别的边缘,然后单击“运行”按钮查看运行结果。
Step3:用类似方法找出需要测量角度的三条边。
Step4:添加测直线间角工具——CogAngleLineLineTool工具,設置工具相关参数并运行。将CogFindLineTool工具输出端的Results.GetLine()拖拽到CogAngleLineLineTool工具输入端LineA,LineB操作类似。
Step6:同理可测出另一角度数据,最终结果如图5所示。A1=125.433度,A2=53.111度。
2.2.5 AB间距
求A、B两点间的距离D,其具体步骤为:
Step1:添加直线相交工具——CogIntersectLineLineTool工具,获取交点坐标。添加输入图像,设置CogIntersect LineLineTool工具的相关参数。单击运行,查看运行结果。
Step2:添加点间距离测量工具并运行CogDistancePoint PointTool工具,设置工具相关参数并运行,结果如图6所示,D=200.759 0 mm。
3 结 论
本论文首先介绍了机器视觉技术的基本概念,然后阐述了运用机器视觉技术测量工件尺寸相较于传统检测人员通过仪器仪表测量的优点,由此总结出机器视觉检测是工业发展的一种必然趋势。接着说明了机器视觉系统硬件构成,包含光源控制器、视觉控制器、视觉控制器适配器、相机适配器等元器件,最后通过VisionPro软件设计完成了对工件的长度、宽度、圆心距、直径和角度的测量,学生通过该项目的实训,能够较好地掌握机器视觉对于工件尺寸的检测。
参考文献:
[1] 刘金桥,吴金强.机器视觉系统发展及其应用 [J].机械工程与自动化,2010(1):215-216.
[2] 郭静,罗华,张涛.机器视觉与应用 [J].电子科技,2014,27(7):185-188.
[3] 刘中坡,杜宝江,张杰.基于机器视觉的零件尺寸自动测量系统 [J].精密制造与自动化,2006(2):47-49.
[4] 戴知圣,潘晴,钟小芸.基于机器视觉的工件尺寸和角度的测量 [J].计算机测量与控制,2016,24(2):27-29+41.
[5] 常春国,徐运涛.应用机器视觉精确检测工件尺寸的研究 [J].电子质量,2008(2):1-4.
作者简介:张苏新(1987—),男,汉族,江苏苏州人,讲师,工学硕士,研究方向:电气控制、智能控制。
