四激振器激励下振动机械‐物料系统同步控制∗
2021-06-26黄志龙张众超楚树坡宋桂秋张学良
黄志龙,张众超,楚树坡,宋桂秋,张学良
(1.东北大学机械工程与自动化学院 沈阳,110819)(2.绍兴文理学院机械与电气工程学院 绍兴,312000)(3.青岛海洋科学与技术试点国家实验室 青岛,266237)
引言
同步理论在各个行业应用广泛[1‐3]。Wen 等[4‐5]对振动同步理论进行了广泛的拓展和应用,取得了重要成果。为了增加振动机械的输出功率,研究人员从2 个激振器同步运动转向多个激振器的同步运动研究。Zhang 等[6]研究了远共振振动系统中3 个不相同的同向旋转激振器的相位和速度自同步。Zhao 等[7]对4 个感应电机驱动的振动系统进行了同步理论研究。刘云山等[8]利用自同步方法对三激振器激励下的振动同步传动理论进行了研究。为了更加符合实际工况,激振器激励振动机械的同步理论研究应考虑物料对振动系统的影响[4‐5]。因此,笔者研究了考虑物料影响的振动系统中4 个激振器的相位和速度同步。
随着激振器数量的增加,采用控制理论解决同步问题是不错的选择。在许多同步控制的研究和应用中,自适应滑模控制算法被广泛用于提高同步控制系统的鲁棒性[9‐11]。Sun 等[12]通过交叉耦合和自适应方法控制多个运动轴的反馈位置误差,实现了位置同步。Kong 等[13]通过主从控制策略和自适应滑模控制算法研究了线性振动系统中4 个激振器的同步控制。为了提高振动机械系统的同步精度,笔者针对振动机械‐物料系统中4 个激振器的同步控制问题建立了新的控制系统。控制系统采用相邻交叉耦合控制策略和自适应全局滑模算法,考虑了相邻激振器之间的耦合特性。
笔者研究了振动机械‐物料系统中4 个激振器的转速和相位的相邻交叉耦合同步控制。首先,推导了4 个激振器激励下的振动机械‐物料系统动力学模型;其次,考虑到振动机械‐物料系统中4 个反向旋转激振器之间存在耦合动力学特性,建立了相邻交叉耦合策略控制器;然后,通过Lyapunov 理论证明了所提出的控制器的稳定性;最后,通过数值模拟进一步验证了提出的控制器能够有效控制振动机械‐物料系统。
1 振动机械‐物料系统的动力学模型
图1 为给出了考虑物料影响的四激振器激励振动系统的数学模型。4 个激振器对称分布,激振器1和4 逆时针旋转,激振器2 和3 顺时针旋转。在系统的质心平衡点取Oxy坐标,系统有3 个自由度,即x,y方向和绕质心摆动方向ψ。当非线性振动系统中4个激振器的速度和相位分别相同时,实现y方向上的线性振动轨迹,消除了x方向的振动和ψ方向上的摆动。取y振动方向和水平方向的夹角δ为振动方向角,Fm和Fm分别为物料在x和y方向上对振动机体的非线性作用力。

图1 四激振器驱动非线性振动系统的数学模型Fig.1 Mathematic model of nonlinear vibration system driv‐en by four exciters
利用拉格朗日方法建立了4 个激振器驱动非线性振动系统的微分方程

其中:rj为激振器的偏心距离,rj=r,j=1,2,3,4;l0为振动机体的质心和激振器回转中心之间的距离;δ为振动方向角;M为非线性振动系统的总质量,M=m+mj+kw mw;m为振动机体的质量;mj为激振器的质量;mw为物料的质量;kw为物料的结合系数;J为振动系统的转动惯量;Jp为机体的转动惯量;le为振动系统的等效转动半径;Jj为异步电机的转动惯 量,Jj≈mjr2;fj为异步电机的阻尼系数;Tej为 异步电机的电磁转矩。
Fm和Fm分别为物料作用在x和y方向的非线性力[14]
其中φd,φz分别为物料颗粒开始抛掷运动时的振动相角和物料颗粒抛掷运动结束时的振动相角;分别为物料颗粒下落时在y方向上的速度和此时振动机体在y方向上的速度。
在非线性振动机械‐物料系统中4 个异步电机的磁链方程[15]为
电磁转矩方程为

将式(5)代入式(1)中,通过控制非线性振动机械‐物料系统中4 个异步电机的转矩电流实现4 个反向回转激振器的同步运动。当4 个异步电机的转速和相位实现同步时,非线性振动机械‐物料系统只能实现y方向上的直线振动轨迹,消除了x方向上的运动和ψ方向上的摆动运动。因此,考虑到物料影响的振动系统的同步控制问题转化为由具有非线性负载转矩的感应电动机驱动的4 个激振器的速度和相位同步控制问题,状态方程可以简化为

其 中:Amj=-fj/Jj;Bmj=Kj/Jj;Cmj=-1/Jj;uj为电机的输入转矩电流。
考虑到系统的外部负载扰动,式(6)可写成

2 反向回转四激振器相邻交叉耦合控制策略
采用相邻交叉耦合控制策略对4 台反向回转的异步电机进行控制,可以实现相邻两台电机耦合形成耦合环,既考虑了两个相邻电机之间的交叉耦合特性又降低了控制系统的复杂程度。采用相邻交叉耦合控制对4 台反向回转的异步电机的转速和相位差进行控制,从而实现4 个反向回转的激振器的同步运动。首先定义第j台电机的转速和相位跟踪误差分别为=ωj(t)-ωd(t) 和ej(t)=φj(t)-φd(t),其中ωj(t)和ωd(t)分别表示第j台电机的参考转速和实际输出转速。非线性振动系统中异步电机跟踪误差应该满足

在相邻交叉耦合控制策略中,同步误差将通过补偿模块分别对相邻电机和受扰动电机本身形成反馈。对系统中4 个反向回转的电机的同步误差应该有
如 果νj(t)=0 和=0(j=1,2,3,4)成 立,则式(8)成立,从而实现非线性振动机械‐物料系统中4 个反向回转异步电机的同步控制目标。在此定义电机的相位耦合误差和电机的转速耦合误差为
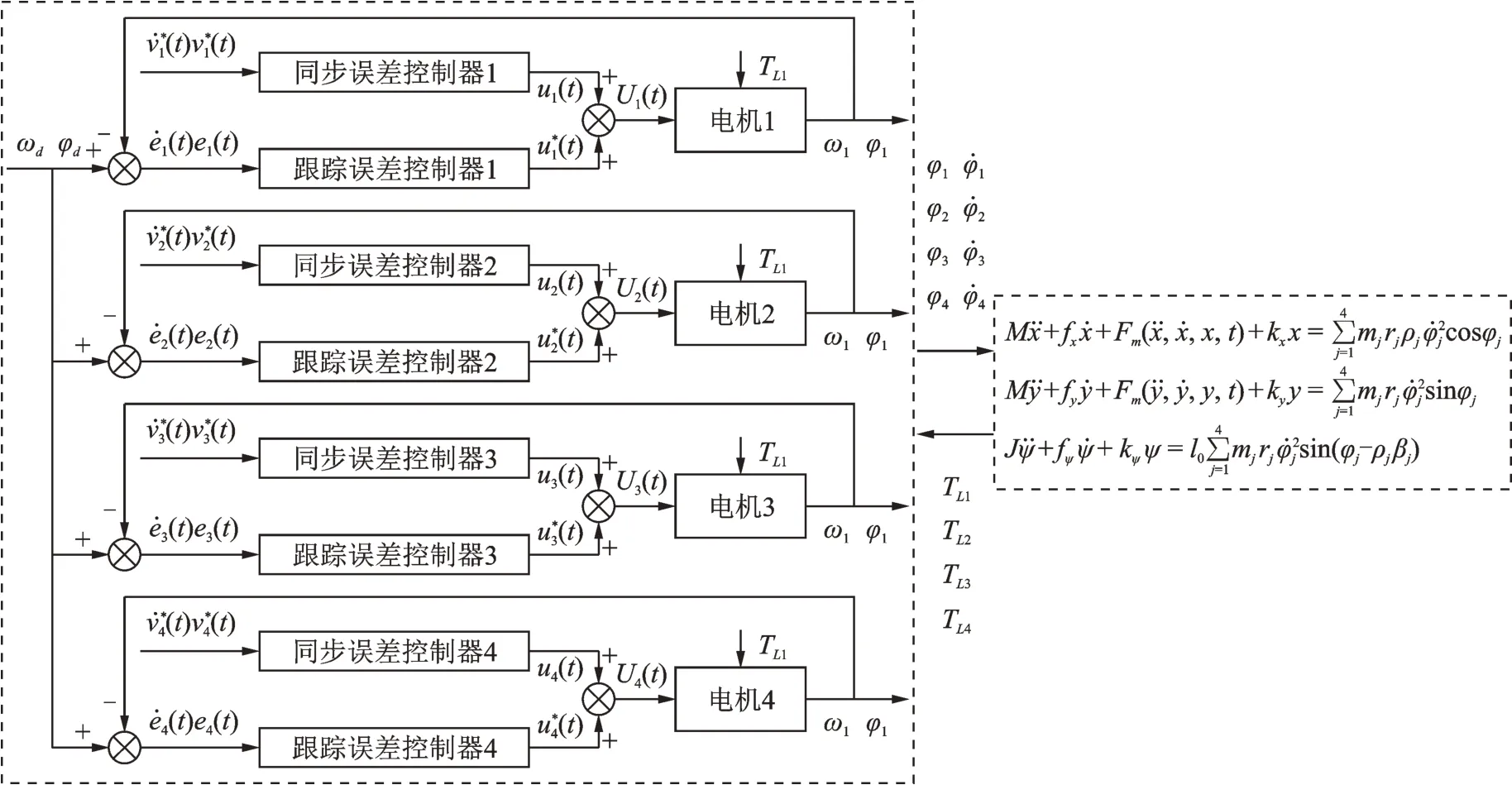
图2 反向旋转感应电机的相邻交叉耦合控制框图Fig.2 Adjacent cross-coupling control block diagram of reverse-rotation induction motors
3 四激振器相邻交叉耦合控制器的设计
将非线性振动机械‐物料系统的相邻交叉耦合控制器设计为跟踪误差控制器和同步误差控制器两部分。
3.1 跟踪误差控制器设计和稳定性分析

其中:Wj(t)≤σj为非线性振动机械‐物料系统总不确定性。
跟踪误差全局滑动变量为

其中:αj和βj为正的常数。
全滑模因子F(t) 具有一阶导数并且(t)=0,当满足式(12)时有

其中:λ为非常小的正常数。
由式(11)~(13)可知,对Sj求导后可以得到

设计等效控制率为

设计鲁棒控制器为

由式(15)和式(16)可以得到非线性振动机械‐物料系统中4 个反向回转激振器的跟踪误差控制律为
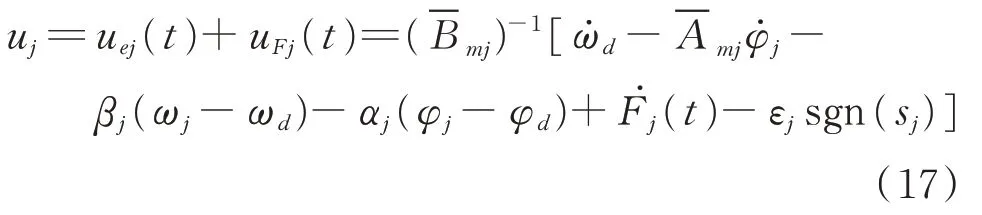
其中:j=1,2,3,4。
稳定性与有效性分析如下。
定理1如果εj>σj(j=1,2,3,4)成立,则有跟踪误差控制律方程(17)使4 个反向回转激振器的转速和相位跟踪误差轨迹限制在跟踪误差滑模面上,并且控制系统渐进稳定。
证明1

求导可得
当εj>σj成立,则有<0 成立。根据Lyapu‐nov 稳定性定理,具有4 个反向回转的激振器的跟踪误差控制系统是渐近稳定的,因此可以得到=0,对式(12)求导后代入=0,可以得到

因为αj和βj都是正的常数,方程满足Hurwitz条件。可以得到=0 和=0(j=1,2,3,4)。
3.2 同步误差数学模型和稳定性分析
基于相邻交叉耦合控制策略,设计出4 台异步电机相位和转速同步误差的数学模型。异步电机的相位和转速同步误差滑动面j(j=1,2,3,4)为


其中:Sj(t)为第j个激振器的转速和相位跟踪误差滑动面。
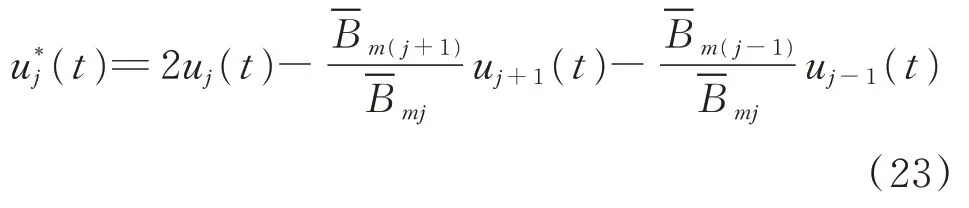
将反向回转激振器的转速和相位同步误差控制律设计为
稳定性与有效性分析如下。
定理2如果εj>σj(j=1,2,3,4)成立,非线性振动系统中4 个反向回转的异步电机的速度和相位同步误差控制器可以在控制速率式(23)控制下稳定在滑动面上,因此系统渐进稳定。
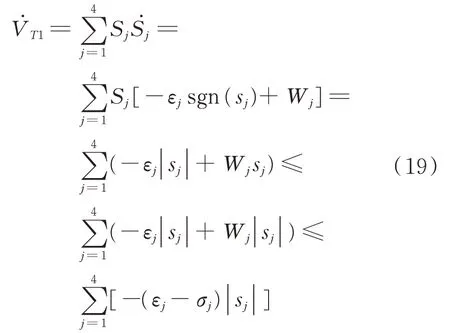
证明2结合式(22),可以得到为


因此,非线性振动机械‐物料系统中4 个反向回转激振器的跟踪误差控制器和同步误差控制器能够使激振器的转速和相位实现同步,可以得到全局滑模控制律为
3.3 自适应算法和全局稳定性分析
由于振动机械‐物料系统的高度非线性和时变特性,激振器所承受的非线性时变负载转矩很难确定。因此,采用自适应方法来调整开关增益εj(j=1,2,3,4)可以得到更好的控制效果,设计εj为

其中:γj为正值的自适应增益。

全局稳定性证明如下,Lyapunov 正定函数定义为

对式(29)求导可得

其中
其中:ηj和δj为小的正常数。
将提出的相邻交叉耦合控制器使用饱和函数sat(sj)代替符号函数sgn(sj)能更好地抑制抖振现象
其中:z为一个大于零并且非常小的值。
修改后的控制律为
4 仿真分析
所提出的相邻交叉耦合控制器由Matlab/Simu‐link 模拟。使用相邻交叉耦合控制器来控制非线性振动机械‐物料系统,以说明非线性振动系统的特性,并讨论和分析了非线性振动机械‐物料系统物料参数变化对相邻交叉耦合控制系统的影响,以反映所提出的相邻交叉耦合控制器对非线性振动系统的有效性。振动机械‐物料系统和控制系统的相关参数如表1 和表2 所示。
表1 振动机械‐物料系统的参数Tab.1 Vibration machinery‐material system parame‐ters
表2 4 个异步电机和控制系统的参数Tab.2 Parameters of four asynchronous motors and control systems
采用提出的相邻交叉耦合控制器控制考虑物料非线性力的4 个激振器激励振动机械系统。仿真分析的结果如图3 所示。由图3(a)可以看出,4 个异步电机的转速在启动阶段和稳定阶段的同步效果较好,启动阶段无转速超调,稳定阶段的转速波动较小。由图3(b)可以看出,4 个异步电机相互之间的相位差曲线在启动阶段出现波动,由于系统受到物料非线性力作用,系统稳定后相位差小幅增大但仍然在零附近波动。由图3(c,d)可以看出,系统能够在y方向上产生稳定的直线振动轨迹,消除了x方向的振动,并且ψ方向上的摆动运动在稳定后很小。这说明在相邻交叉耦合控制器的控制下,4 个激振器激励非线性振动机械‐物料系统能够满足实际要求实现稳定振动轨迹。从上述分析可以看出,由于相邻交叉耦合控制器在控制过程中同时考虑了跟踪误差和相邻电机之间的同步误差,因此可以有效地控制考虑物料影响的振动机械系统,以达到所需要的直线振动轨迹。针对四激振器激励下非线性振动系统提出的相邻交叉耦合控制器提高了控制精度,合理地降低了控制系统的复杂性。
图3 考虑物料影响的系统同步性能Fig.3 Synchronization performance of system considering the influence of material
由于在实际工程中,物料质量在振动系统运行期间会发生变化,下面分析当物料质量发生变化时对相邻交叉耦合控制器的性能影响。当第5s 时物料质量从50 kg 变为30 kg,其他参数保持不变,讨论此时对相邻交叉耦合控制器同步性能的影响。如图4(a,b)所示,在相邻交叉耦合控制器的作用下,4 个激振器的转速和相位处于同步运动状态,物料的变化对转速和相位同步运动没有影响,并且相位差一直在零附近波动。如图4(c,d)所示,非线性振动机械系统在y方向上的振幅随着物料质量的减小而增大,并且系统在物料发生变化后仍然可以在y方向上形成有效的直线振动轨迹,x方向和ψ摆动方向的振动很小,表明系统的响应是稳定的。如图4(e,f)所示,由于物料的变化,输出转矩随负载转矩减小而变化。可以看出,当物料变化时,相邻交叉耦合控制器可以控制系统中4 个激振器在上述干扰条件下实现同步运动,这与前面的理论分析一致,4 个激振器中激振器1 和激振器4 沿逆时针方向旋转,激振器2和3 沿顺时针旋转。反向回转的激振器相互抵消x方向上的作用力,相互叠加y方向作用力。当4 个激振器的转速和相位都处于同步状态时,在y方向产生稳定的直线振动轨迹,消除x方向振动和ψ方向的摆动运动。综上所述,针对4 个激振器激励下的振动机械‐物料系统所提出的相邻交叉耦合控制器能够抑制物料参数变化对系统同步性能的影响。相邻交叉耦合控制器对4 个激振器激励下的振动系统具有良好的控制性能,并且提高了控制精度。
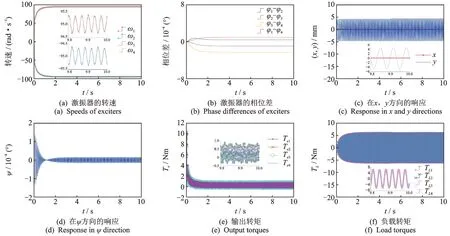
图4 物料质量变化对相邻交叉耦合控制器的影响Fig.4 The influence of material mass changes on adjacent cross-coupling control controller
5 结论
1)推导了考虑物料影响的4 个反向回转激振器激励下的振动机械系统动力学模型,针对非线性振动机械‐物料系统中4 个反向回转激振器的转速和相位同步问题,建立了自适应全局滑模算法和相邻交叉耦合控制策略结合的控制器。
2)通过相邻交叉耦合控制器对非线性振动机械‐物料系统中4 个反向回转激振器的控制,非线性振动系统实现了稳定的直线振动轨迹。相邻交叉耦合策略考虑了相邻激振器之间的耦合作用,提高了4 个反向回转的激振器转速和相位的控制精度。自适应全局滑模算法能够对非线性振动系统的总不确定性进行自适应逼近,使系统的响应更加平稳。
3)由于系统中存在非线性力的影响,使4 个反向回转异步电机受到复杂的非线性时变负载转矩,但在相邻交叉耦合控制器的作用下系统仍然实现了稳定的振幅。通过分析非线性振动机械‐物料系统中物料参数变化对相邻交叉耦合控制器的影响,进一步验证了控制器控制非线性振动系统的有效性。
