基于模糊PID 的纯电动车辆控制策略研究*
2021-06-26张宝玉
张宝玉
(江苏食品药品职业技术学院,江苏 淮安 223001)
1 模糊PID 控制介绍
模糊PID 自适应控制器是将模糊控制和PID 控制器两者结合在一起,可实时通过经验化模糊规则整定PID 的一种智能算法,它可以弥补传统PID 的缺点,不需要建立精确的被控对象模型,只需要将积累的经验转换成相应的模糊规则进行控制[1]。它具有工作比较稳定,对于非线性时变系统有较好的控制效果等优点。
2 电池模型建立
作为新能源汽车的能源动力模块,在汽车巡航系统仿真分析过程中,动力电池建模至关重要。本文电池模型使用二阶RC 等效电路模型,采用开路电压法及含遗忘因子的递推最小二乘法(FFRLS)进行模型参数辨识,采用扩展卡尔曼滤波算法(EKF)进行SOC 估算。图1 为本文所设计的电池模型。
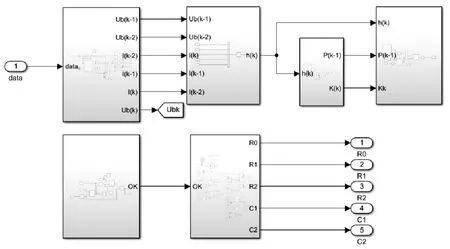
图1 电池模型
2.1 HPPC 实验
HPPC 实验测得电池开路电压,得出SOC-OCV 曲线,见图2 所示。
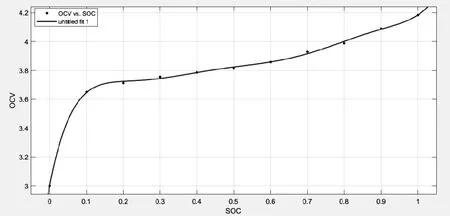
图2 SOC-OCV 曲线
将实车跑动采集到的电流电压数据导入模型,进行含遗忘因子的递推最小二乘法迭代运算,辨识出二阶RC 模型所需的参数R0,R1,R2,C1 及C2。辨识结果如图3 所示。
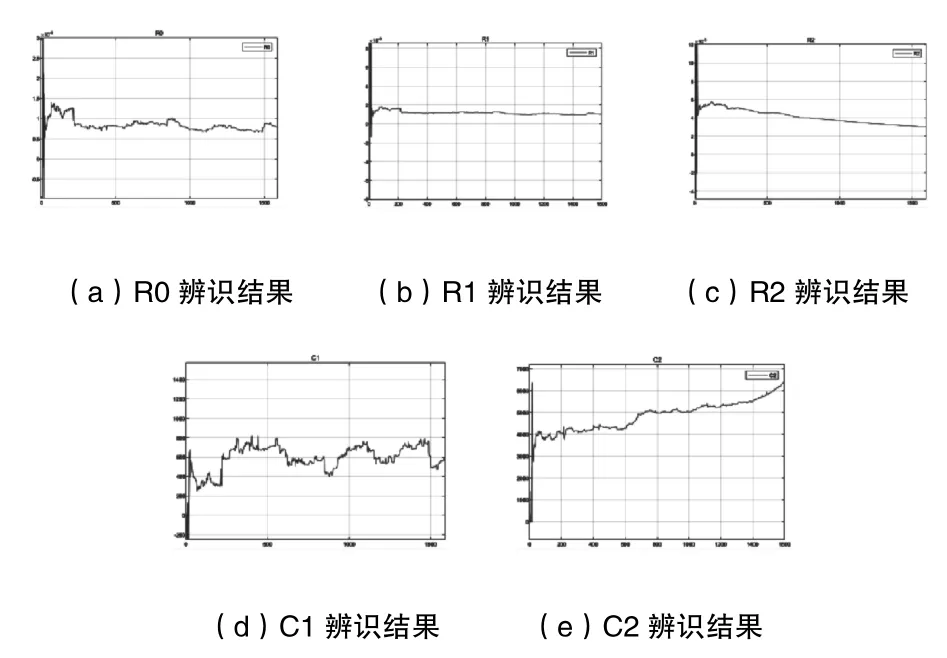
图3 辨识结果
2.2 二阶RC 等效电路模型
电动汽车动力电池模型是针对电池静态特性的简化和描述,建立可以准确模拟电池内外部工作特性的电池模型是提高状态估计精度的基础[2]。本文采用二阶RC 等效电路模型对锂电池建模。
将上述辨识出的参数代入模型中,仿真验证结果如图4所示,模型仿真值和实际值误差在0.1V 之内,大部分在0.05V之内,说明建立的电池模型相对准确。
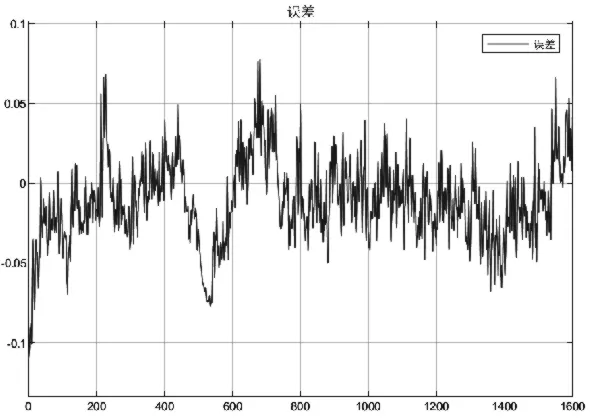
图4 仿真验证结果
3 电机建模
电机控制器模型的输入为实际车速、电门开度、电机请求转矩、电池电流、电池实际输出功率、电池最大输出功率和电机转速,模型的输出为当前状态下允许电机输出的最大转矩[3]。电机控制器根据实际车速、电门开度和电机外特性曲线不同转速下最大输出转矩,再根据电机请求的转矩和电机转速结合电机的效率图计算得出此时电机的损失功率,最后根据在当前SOC 下电池的输出功率和最大输出功率,计算出此时电机控制器允许驱动电机输出的转矩。电机输出扭矩计算模块如图5 所示。
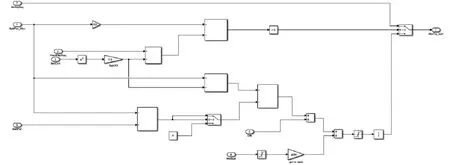
图5 电机输出扭矩计算
本研究所采用的电机为永磁同步电机,Simulink 中有自带的永磁同步电机仿真模型,可以满足大多研究需求[4]。但是永磁同步电机系统需要输入的参数太多,在仿真中很多参数用不到比较麻烦。因此,搭建能满足仿真需求的建议永磁同步电机仿真模型如图6 所示。
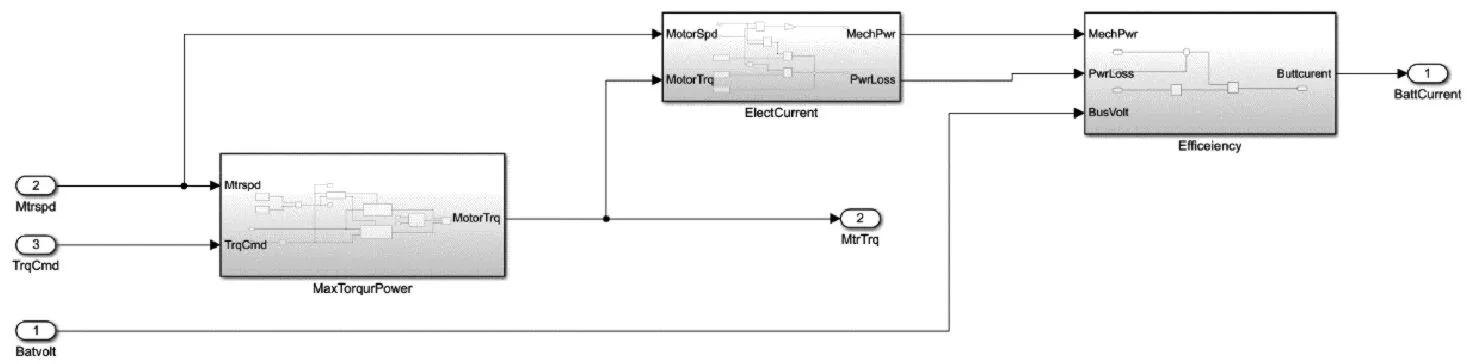
图6 电机模型
驱动电机模型的输入为电池电压、电机需求转速和来自电机控制器的允许输出转矩,输出为此时需求的电流和实际输出转矩。
4 仿真验证
将制定好的模糊规则使用MATLAB 模糊工具箱生成相应的模糊文件,并使用Simulink 搭建模糊PID 自适应控制器模型,如图7 所示。

图7 模糊PI 控制器模型
使用Simulink 搭建出纵向控制器模型,并加入整车模型中进行仿真验证,得出的纵向速度控制曲线如图8 所示。
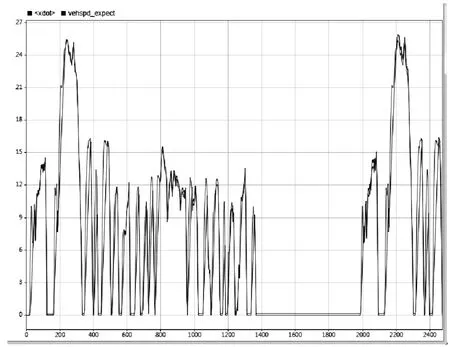
图8 期望车速与实际车速对比
由下图可以看出加入纵向控制器之后实际车速基本能跟踪上目标车速,无论是加速还是减速都能对目标车速进行较好的跟踪。因此,模糊PID 自适应控制器控制效果良好,动态抗干扰能力较强,鲁棒性较高,能实现理想的控制目标。
5 结论
本文以纯电动汽车为研究对象,进行了动力学建模,然后通过整车模型对模糊PID 纵向控制策略进行了实际仿真验证。从仿真结果上来看,整个控制算法满足实际需求,实际车速与目标车速误差处于可接受范围之内。
