基于改进磷虾群算法的火电厂负荷优化分配
2021-06-25杨如意
杨如意
(国电内蒙古东胜热电有限公司,内蒙古自治区 鄂尔多斯 017000)
0 引言
根据GB 13223《火电厂空气污染物排放标准》的有关规定,自2012年1月1日起,电厂粉尘排放浓度需小于30mg/m3,SO2和NOx的排放浓度需小于100mg/m3。当前除尘、脱硫和脱硝设备大多已经过改造并用于燃煤发电机组。通过静电除尘、低NOx燃烧、催化还原等新技术,机组的污染排放指标可以达到国家排放标准。同时,由于化石燃料燃烧引起的环境问题以及日益严峻的环境压力,粉尘、SO2,NOx等污染物排放费用增加,电厂面临提高运营效率和减少排放的双重压力。经过除尘、脱硫和脱硝设备改造后,根据经济效益和污染排放量,研究合理的电厂负荷分配方法,是确保电厂获得最佳综合经济效益的有效途径。
目前,电厂负荷优化分配的研究主要集中在除尘、脱硫、脱硝设备改造前的负荷分配模型和智能优化算法方面[1-10]。大部分负荷分配模型考虑了供煤耗、NOx排放、各种约束条件等因素,通过采用遗传算法、粒子群算法、差分进化算法进行智能优化。部分负荷分配模型还兼顾了除尘、脱硫、脱硝补偿电价和各种污染物的排放费用。但大部分模型未对负荷分配的快速性调节进行研究,通过对负荷分配的调节进行快速响应,能够进一步提升负荷分配效率,增强电厂灵活运行能力,使电厂更适应当前激烈竞争的市场环境。
本文在最新智能算法磷虾群算法的基础上,通过初始化调节优化、超参数优化以及增强种群间信息交流,对电厂负荷优化分配快速性问题进行了优化求解,通过与遗产算法(GA)、粒子群算法(PSO)对比,表明了本文算法的有效性,同时也验证了本文所采取的快速调节方案的可行性。
1 负荷优化分配数学模型
1.1 目标函数
设电厂共有N台机组,调度的总时段数为T,第t个时段总负荷为机组负荷优化分配的目标函数一般是在考虑多种约束条件的情况下,最小化总的发电成本,即:


式(2)中,ai,bi,ci为第i台机组成本曲线系数。
1.2 约束条件
1)功率平衡约束

2)旋转备用约束

3)机组处理上下限

式(5)中,Pi为机组i运行时的最小出力。
4)机组速率爬坡约束

1.3 快速调节解决方案
针对AGC调节机组,其负荷响应速率需大于等于电网调度速率限值,如式(7)所示:

则单台机组完成负荷调度的时间如式(8)所示:

式(8)中,vunit,i是第i台机组升降负荷速率,文中vunit,i=2%MCR[10]。则电厂完成AGC指令调度的时间如式(9)所示:

为使电厂能达到电网的考核要求,电厂完成AGC指令调度时间须在电网调度速率限值之下,即tf<tmax,其中:
根据式(10)的时间约束,新的机组上下限如式(11)所示:

2 基于改进磷虾群算法的优化调度
2.1 磷虾群算法
磷虾群算法(KH)作为一种新的智能优化算法,因其具有操作简单、搜索多样性强和调整的参数较少等优点而应用广泛[11,12]。KH算法源于磷虾觅食和彼此之间的相互交流。KH算法之中,每只磷虾个体的位置都代表了一个可行解。在海洋中,磷虾个体的位置通常由如下3个因素决定:
1)种群位置迁移引起的个体游动
式中:Nmax代表最大的诱导速度,取0.01(ms-1);ωn代表运动诱导的范围的惯性权重,取值范围为[0,1]代表先前运动和分别代表当前位置和目标位置。
3)磷虾个体的随机扩散
式中:βi为磷虾个体觅食的方向

式(18)中,Dmax为最大的扰动(扩散)速度;δ是随机方向矢量,其取值范围在[-1,1];Di为第i个磷虾个体随机扩散引起的位置变化。
磷虾个体的扩散现象与食物源的位置有关,越靠近越不明显。磷虾个体的游动方向由上述3个因素共同决定,即朝着适应度值最小的方向改变。其中,诱导运动和觅食运动均具有全局和局部搜索功能。随着算法的迭代更新,这两种措施并行进行,使算法成为一种稳定有效的优化算法。
综上所述,从t到t+Δt时间内的位置矢量可表示为:

式(19)中,Δt为速度矢量的步长调节因子。

式(20)中,NV是变量总数;LBj和UBj是第j个变量的上、下界限;Ct是一个常数[0,2]。
2.2 改进磷虾群算法(IKH)
KH算法作为一种群智能算法,因为寻优搜索的随机性,使算法有时候易陷入局部最优点,难以跳出[13]。针对以上KH算法的缺陷,本文提出如下改进措施。
2.2.1 种群初始化优化
1)改善种群初始化位置。本文通过采用反向学习算法对种群位置实施初始化,该算法能够有效改善种群初始化位置的质量。此算法具体实施过程如下(其中,NP表示可行解的维数;NK表示种群数量;G表示当前迭代次数):
① 初始化种群位置P(G=0)={xij}i=1,2,…NP j=1,2,…NK
② 计算反向种群位置P'(G=0)={x'ij},

式(21)中,xi,min和xi,max是第i维元素的最小值和最大值。
③ 从组合种群位置{P(G=0)∪P'(G=0)}取NK个适应度值较小的位置,当作初始种群位置。
2.2.2 超参数优化
从式(20)可以看出,Ct在KH算法中起着非常重要的作用,较大的步长可以加速早期的收敛,但这使得获得精确解变得更加困难甚至不可能。为了更好地平衡算法前期的全局探索能力和后期的局部寻优能力,从而采用线性递减策略更新Ct:

式(22)中,Ct∈[0,2];a=0.45,b=0.1;Gmax为最大迭代次数。
3.2.3 增强种群个体间的信息交流
根据Gandomi和Alavi的工作[15],原KH中的磷虾个体间的信息变化不足。本文受粒子群算法中粒子更新的启发,提出如下改进方法应用于增强磷虾之间的信息交流。在IKH中,磷虾被部分随机选择,以增强磷虾群之间的信息变化。在更新过程中,随机选择磷虾种群的一半,使用(19)式进行更新。而另一半更新如下:
式中,C1和C2是常量值,本文C1=1.2,C2=0.8;r1和r2是区间[0,1]中的随机值;w0是线性递减的惯性权重,wmax=0.9,wmin=0.4。Xibest为磷虾个体i的局部最优位置矢量,Xbest为当前所有磷虾个体中最优位置矢量。从IKH(23)式可知,其将磷虾个体本身的“惯性”寻优、个体局部优势以及种群全局优势有效结合,显著增强了磷虾种群内部的信息交流,大大弥补了算法的不足。
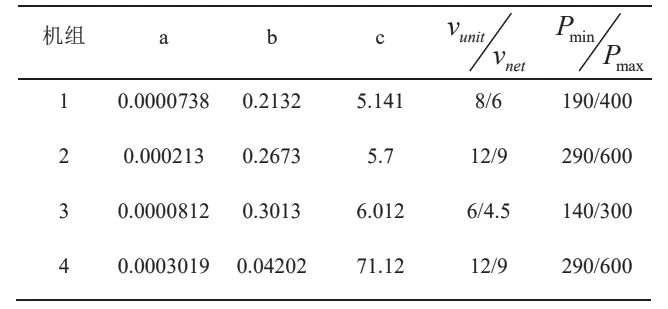
表1 机组二次煤耗特性数据Table 1 Characteristic data of each unit

表2 无速率约束IKH的优化结果Table 2 Optimization results of IKH without rate constraint
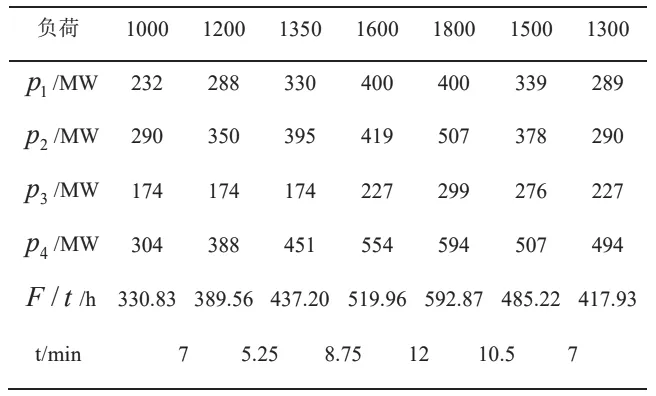
表3 速率约束下IKH的优化结果Table 3 Optimization results of IKH under the rate constraint
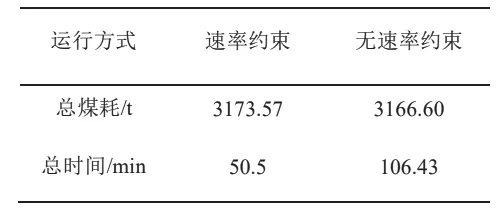
表4 两种运行方式结果对比Table 4 Comparison of the results of three kinds of operation mode
3 仿真结果及分析
本文以某电厂四机组为例,煤耗特性方程系数见表1。在C#软件平台上采用IKH,对是否有速率约束进行7个时段的优化对比。算法中,磷虾群算法参数为种群算量70,最大可迭代次数为200,最大感应速度N max=0.01m/s,觅食速率Vf=0.02m/s,磷虾群扩散速度Dmax=0.005m/s。
从表2表3可知(以AGC指令从1600MW变为1800MW为例),不采取快速调节的情况下,负荷分配将完全以成本(煤耗)最低位优化方向,则分配方案优先考虑低煤耗机组,只有#1和#4机组参与了调节。而快速调节方案则考虑了电网调度要求,进行了多目标优化,更多的机组参与调节,大大缩短负荷调节时间。
从表4可知,虽然无速率约束的总煤耗要比速率约束的低,但低的幅度并不大,而速率约束下调节时间则大幅度缩短。结合AGC考核,煤耗所多花费完全可以从AGC考核奖励中抵除,快速调节将获得更高的效益。
从上述表中的数据以及与其他优化方法的对比结果可以看出,本文的算法以及所采取快速性方案有比较明显的效果,说明方案是可行的。
4 结论
本文从电厂机组实际运行状况出发,提出了一种在常规电厂负荷分配方式上,对于参与AGC调节的机组,通过考虑电网调度速率限值,计算出AGC调度的最大时间约束,从而在优化分配过程中动态修正负荷上下限约束,减小算法搜索,缩短负荷调节时间,增强电厂负荷调节灵活性能量。同时,以改进磷虾群算法对优化分配方案进行算法实现,有无约束仿真对比结果以及与GA、PSO等算法的对比可知,所提快速性调节方案和IKH算法具有较高的效率和良好的效果。

表5 GA、PSO和IKH算法优化结果Table 5 Optimization results of GA、PSO and IKH
