基于垂起固定翼技术人工智能巡检策略研究
2021-06-24赵昊东王明馨李小兰
赵昊东,许 超,王明馨,李小兰
(1.国网沈阳供电公司,辽宁 沈阳 110003;2.沈阳农业大学,辽宁 沈阳 110866)
我国电网的高压输电线路分布范围广,且有一部分线路架设在地形复杂、气象环境恶劣的地区。这一情况使输电线路及其相关器件的安全运行面临严峻的考验,对高压输电线路的巡检、维护和管理提出了更高要求。使用无人机进行定期巡检作为一种新型、安全、高效的巡检作业形式已在高压输电线路作业中逐步应用,并呈现替代传统作业方式的趋势[1]。
目前,电力巡检手段主要采用人工利用望远镜巡检和近距离遥控无人机巡检两种方式。这两种方式均以人为基本行动单位。受观测手段及多旋翼无人机控制距离的限制,均需要工作人员靠近输电塔,在巡线人员容易到达的区域有较好的巡检效果。用于巡检的遥控无人机主要分为3种类型:多旋翼无人机、无人直升机和固定翼无人机[2-4]。其中,多旋翼无人机以其可定点悬停采集数据的特点被广泛使用,但是其飞行速度慢,在一定的续航时长下,覆盖的输电线路和输电塔有限。另外,对一些分布在地形复杂和偏远地区的输电塔来说,工作人员靠近输电塔的难度很大,且增加了巡检的时间成本、人员成本以及资金成本。为此,迫切需要一种低成本、高可靠性的电力巡检手段,实现对难以到达的输电塔群的巡检。
本文提出基于垂起式固定翼无人机[5-6](以下简称垂起无人机)的人工智能巡检方法对偏远地区的输电塔群进行智能化巡检。垂起无人机从车载平台起飞,采用惯性与卫星定位组合导航的方法对方圆20 km内位置已知的多个输电塔实现快速自动化巡检。在巡检过程中垂起无人机以固定翼状态对输电塔进行精确的绕圈飞行,使用搭载在垂起无人机上的侧向捷联式成像设备对输电线路和输电塔进行360°监视。此外,本文对该方案在回路仿真系统里进行了仿真验证[7]。
1 垂起无人机智能化巡检技术方案
垂起无人机偏远输电塔群巡检系统包括垂起无人机飞行平台、侧视捷联成像模块以及无人机导航控制系统3个部分。
垂起无人机不但兼具多旋翼无人机可垂直起飞和降落、定点悬停、速度快、覆盖范围广的特点,而且续航时间和负重能力都较强。选择垂起无人机的固定翼模式来进行绕圈飞行,利用侧向的低成本捷联式工业相机完成对输电塔的长时间有效绕圈巡检。与旋翼模式相比,垂起无人机减少了机载电源电量损耗,这也是选择垂起无人机作为飞行平台的根本原因。
1.1 垂起无人机智能化巡检工作流程
执行巡检任务时,操作人员将巡检任务涉及到的所有输电塔的位置坐标作为自动飞行航点写入到飞行任务中,垂起无人机从停放的地面检修车上垂直起飞,如图1所示。垂起无人机在起飞过程中从多旋翼状态切换至固定翼状态后开始进行航点飞行。垂起无人机在飞向下一个输电塔的过程中,会实时判断自身与输电塔之间的距离,当到达设定的安全距离后,无人机会根据相对距离矢量与当前速度矢量的关系做出判断,避免与输电塔进行交汇,然后从输电塔的一侧进入绕圈航线,根据输电塔的位置信息以及预设的绕圈半径和高度控制无人机围绕输电塔,并进行绕圈监测。

图1 基于垂起无人机的输电塔群智能化巡检过程
垂起无人机巡检的详细工作流程如图2所示。在第2个判断环节,如果预设的高度和绕圈半径不合适,可以通过在安全范围内调整高度和绕圈半径,起到对侧视捷联相机拍摄角度和距离的调整。

图2 垂起无人机智能化巡检工作流程
1.2 侧视捷联成像模块
侧视捷联成像模块为可见光制式,固定安装在垂起无人机的侧面,光轴位于垂起无人机机体坐标系Obxbybzb的Obxbyb平面内,垂直于Obxb轴,相机参数如表1所示。该成像模块在巡检过程中负责实时拍摄输电线缆的测试图像信息和输电塔的360°图像信息。本文中选用英伟达的Jetson TX2作为图像处理模块。受限于图像压缩算法的运行性能,方案中图像的帧率为25~30帧/s。

表1 海康机器人工业相机参数
垂起无人机导航控制采用的是惯性测量单元与卫星导航组合导航控制,而且没有地形高度信息,无人机飞行过程中使用的高度是根据气压高度和卫星定位高度融合的高度,精度为3~5 m,所以在围绕输电塔进行定高盘旋飞行时,高度难免有较大偏差。在侧向捷联相机获取到输电塔的图像中,可以根据输电塔主体在图像坐标系的像素位置计算出视线高低角λv。然后,根据视线高低角计算出需要的高度补偿,对定高高度进行修正,从而保证输电塔主体一直处于侧向画面的中间,实现较好的巡检效果。此外,也可根据输电塔主体在侧向图像中的视线方位角λh对绕圈中心进行微调。视线高低角和视线方位角的计算连同图像采集、压缩等功能均在英伟达的Jetson TX2图像处理模块中实现。
1.3 垂起无人机绕圈控制方法
一般情况下,根据图3中左侧示意图可知,在指定L和R后,可根据无人机的实时速度(无人机的一般巡航速度)计算出一个侧向的期望加速度来控制无人机围绕O点进行绕圈飞行。

图3 垂起无人机绕点定高盘旋图
L=2Rsinη
(1)
(2)
(3)
图3中,如果无人机绕圈定高中心存在误差,即输电塔主体在侧向图像中的视线方位角λ不为零。可令η=η0+λh对绕圈中心进行微调。一般情况下,因为定高中心是实测输电塔中心的经纬度,误差几乎为零,所以不建议长时间使用视线方位角对其进行修正。对定高高度的补偿可通过测量的实现高低角λv计算出补偿高度Δh=R·arctanλv。
本方案中垂起无人机的导航控制系统选择Pixhawk开源自驾仪,并对其进行二次开发,垂起无人机的绕圈控制方法位于其固定翼控制状态中的侧向飞行控制应用层。
2 硬件在回路中的仿真过程
2.1 垂起无人机绕圈控制方法
硬件在回路仿真平台软件框架及实物图如图4所示。仿真系统使用X plane-10飞行模拟软件,该软件支持添加自定义地景、地面目标模型与飞行器模型。X plane-10可模拟飞行器光学采集设备进行图像采集,支持调整图像分辨率。采用Q Ground Control(QGC)开源地面站对飞行器数据进行监控,并且支持Pixhawk与X plane-10的硬件在回路中的仿真功能。图4中Pixhawk2自驾仪与TX2底层使用UART串口通信,传输协议为Fast RTPS协议。自驾仪中搭载Nuttx操作系统,使用uORB进行各应用间的消息传递管理。图像采集卡获取可视化飞行模拟电脑中飞行模拟软件的界面信息(仿真无人机的侧向图像信息)后传递给Jetson TX2进行处理。Jetson TX2作为仿真平台中的核心模块之一,安装Ubuntu操作系统,运行图像采集、目标跟踪、图像压缩与传输、数据处理、线程控制等程序,并在目标跟踪软件里对输电塔的视线高低角和视线方位角进行计算。
本文选取机场的塔台作为模拟绕圈目标,如图5所示,并对其进行绕圈飞行仿真,绕圈航迹为黄色虚线圈所示,黄色实线圈中为无人机。
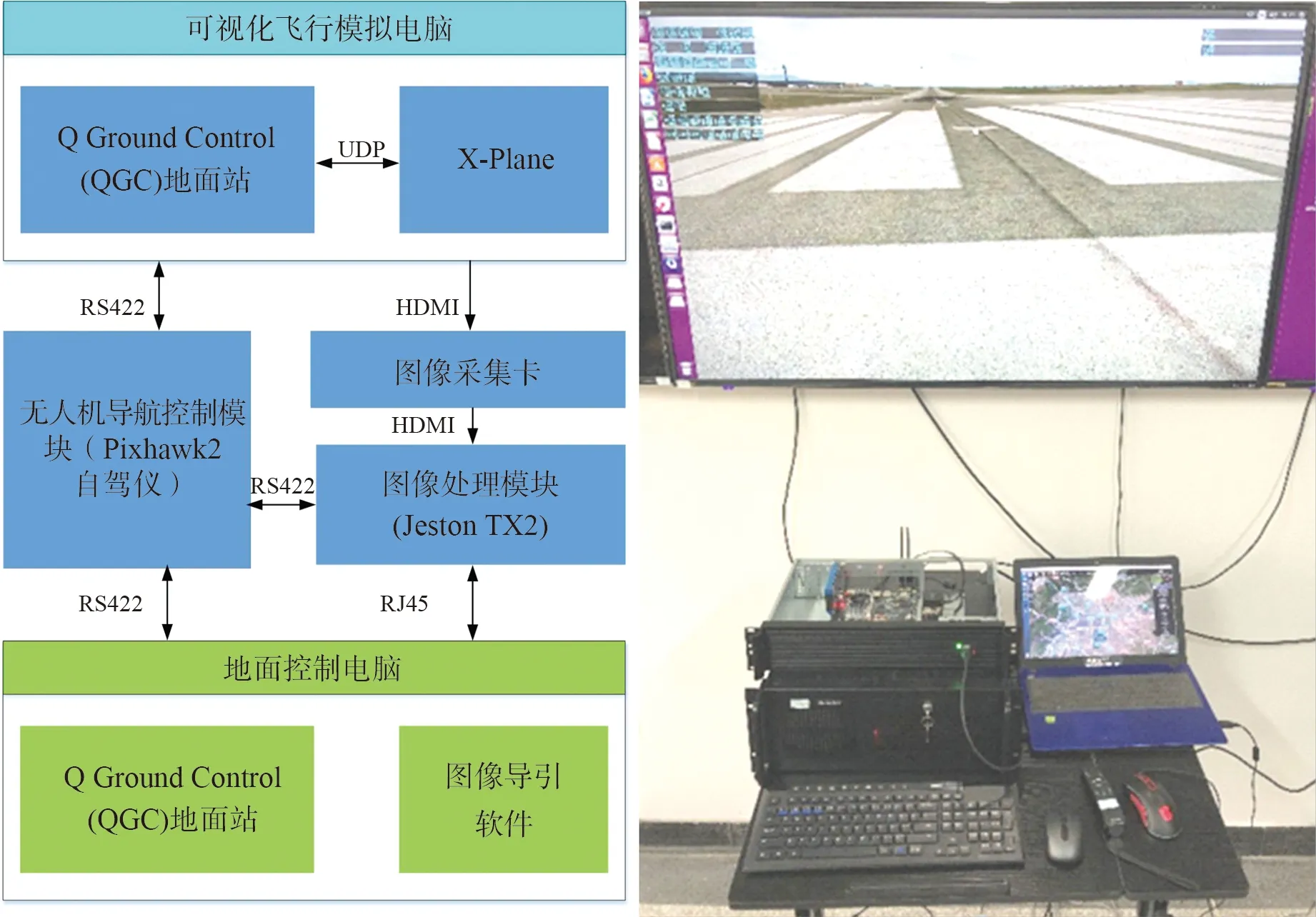
(a)(b)图4 硬件在回路仿真系统中的流程及实物图
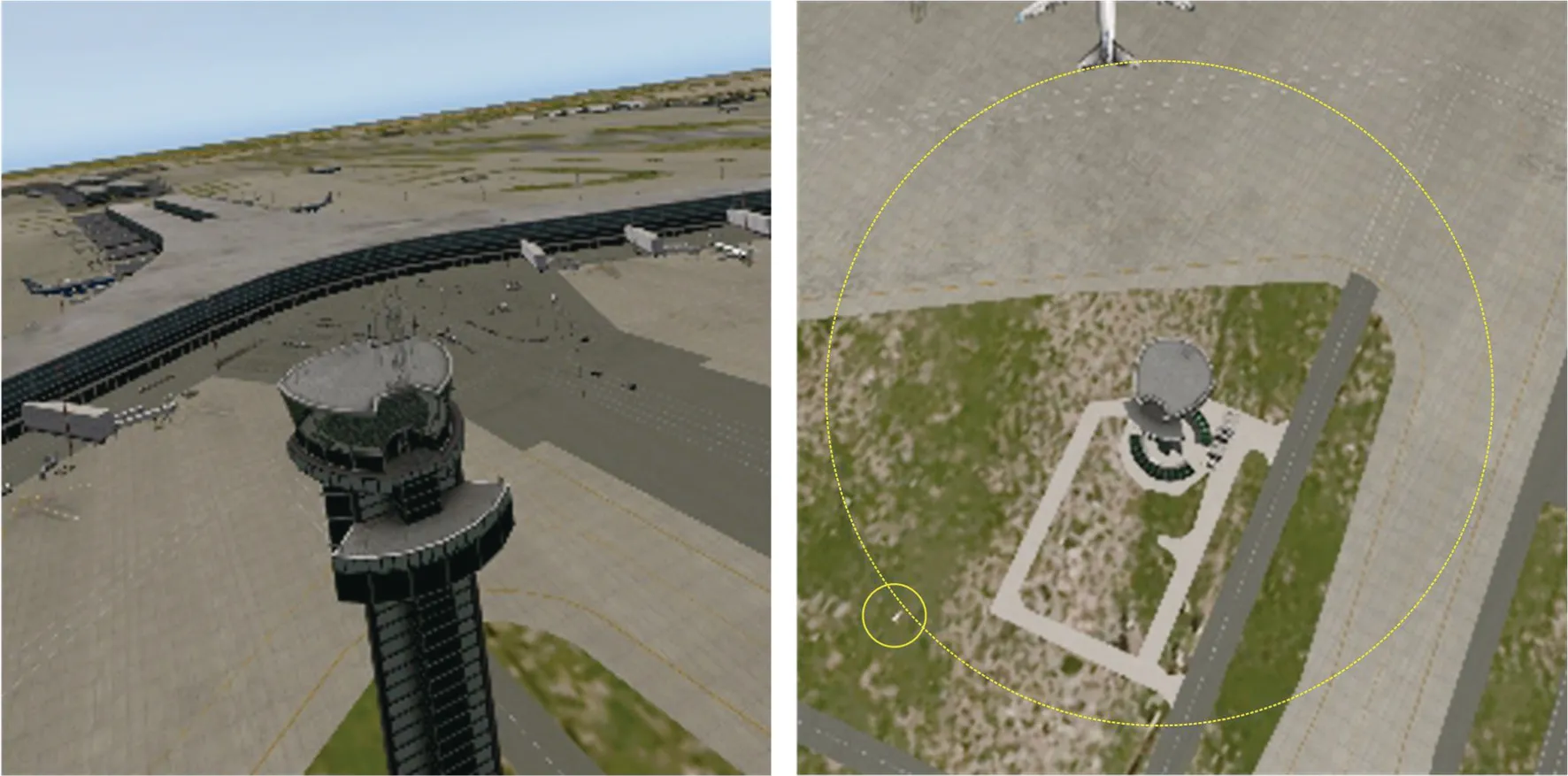
(a)(b)图5 机场控制塔台-硬件在回路仿真模拟绕圈目标
2.2 仿真结果分析
在硬件回路仿真中,仿真无人机围绕塔台以相对高度60 m,半径50 m进行绕圈飞行,无人机的巡航空速约为16 m/s。期间,通过采用塔台某一位置在无人机侧向图像中的高低视线角信息对无人机的绕圈高度进行补偿,使塔台位置可以处于无人机侧向图像的中间区域,仿真数据如图6所示。图6(a)为无人机高度曲线;图6(b) 无人机滚转姿态曲线; 图6(c)无人机俯仰姿态曲线。

(a)

(b)

(c)图6 仿真数据
从图6可知,仿真无人机可以在设定的60 m相对高度稳定地以27°滚转角和4°的俯仰角绕塔台进行半径为50 m的绕圈飞行。图6(a)中的高度为海拔高度,仿真位置的海拔高度为28 m,所以以60 m相对高度飞行时,显示出来的融合高度约为88 m。从图6(b)和图6(c)可以看出,无人机飞行姿态稳定,且姿态控制效果良好。
此外,图6还包含了使用视线高低角进行飞行高度补偿的测试,从图6(a)可以看出期望的高度从88 m变为98 m,同时图6(b)和图6(c)中的滚转和俯仰姿态均作了调整。图6(c)中无人机在爬升过程中为了保持绕圈半径滚转姿态做了5°以内的调整。
3 结束语
本文基于垂起无人机提出对偏远地区的输电塔群进行智能化巡检的方法。垂起无人机的多旋翼模式可用于起降以及悬停后对某一点的检测。垂起无人机以固定翼状态围绕输电塔进行绕圈飞行时,可通过搭载侧向捷联成像设备获取稳定的侧向图像信息来实现对输电塔的检测。此外,垂起无人机的固定翼模式可以以更小的耗能来实现大范围的覆盖,完成对多个输电塔的快速巡检。本文在仿真系统中已经将相关算法在性能可靠的硬件平台上应用,完全具备搭载在无人机上飞行并完成巡检的能力。
