风云四号静止气象卫星测距站坐标测量点的确定及修正
2021-06-24贾耀红裘奕郭强
贾耀红 裘奕 郭强
(国家卫星气象中心,北京 100094)
引言
风云四号(FY-4)卫星是我国第二代静止气象卫星,采用三轴稳定的姿态控制方式,星上搭载了许多高精度载荷,载荷下传数据需要定位和配准后才可以使用,卫星的姿态和轨道也需要定期保持和控制[1-2],这些都离不开高精度的卫星轨道数据支持。
FY-4卫星测距、轨道确定及预报系统就是用以获得卫星高精度轨道数据,其工作原理是几何法测距定轨[3],就是通过测量地面上位于不同地方的多个测距站到卫星的距离进而确定并预报出卫星的位置和轨道,那么各个站的站址坐标就必须精确测量。FY-4卫星的定位原理跟GPS/北斗导航定位系统类似,GPS/北斗通过测量多颗不同位置的卫星天线相位中心到地面接收天线相位中心之间的距离确定出地面目标位置[4-5],但是由于FY-4静止气象卫星测距站采用卡塞格伦天线,并且天线结构比较特殊,无法用天线相位中心作为测距起始参考点和站址坐标测量点,本文介绍了如何根据其天线结构及工作原理确定这两个位置,并给出它们的距离修正算法及其在实际工程中的应用。
1 FY-4测距站天线
FY-4测距站采用的是7.3 m的卡塞格伦天线。这种尺寸天线结构一般有2种方式:①是桁架式,②转台式,桁架式结构简单,成本低,但是由于方位俯仰均采用丝杠,转动速度慢,一般用于转动比较少的场合,如FY-2卫星测距站天线[6];转台式转动速度快,但成本高,一般用于大型天线。在系统设计之初,结合测距定轨可以分时作业实现的特点,从节约成本的角度出发设计出一套设备具备分时对多颗卫星测距定轨的功能,这就要求一套天线能够在规定的时间内指向空间不同位置的卫星。FY-4静止气象卫星在赤道上空从79°~133°E申请了7个轨道位置[7],以北京站为例,针对7个位置的卫星,天线方位最大转动角度约为74°,俯仰约10°,方位转动幅度大,俯仰转动幅度小,于是FY-4卫星测距站采用了简易半转台结构的天线,方位采用简易桶式结构,实现快速全方位转动,俯仰采用丝杠式结构,如图1所示。

图1 FY-4测距站天线结构
2 FY-4测距站测距距离起始参考点
FY-4测距站天线是卡塞格伦天线,由3部分组成,即主反射面、副反射面和辐射源(馈源)。其中主反射面为旋转抛物面,副反射面为旋转双曲面。在结构上,双曲面的一个焦点与抛物面的焦点F2重合,双曲面焦轴与抛物面焦轴重合,而辐射源位于旋转双曲面的另一个焦点F1上,如图2所示。辐射源发出电磁波,经由副反射面反射后发射到主反射面,然后再经由主反射面反射后获得相应方向的平面波波束,实现定向发射[8-9]。其中辐射源位于旋转双曲面的实焦点F1处时,其发出的射线经过双曲面反射后的射线,就相当于双曲面的虚焦点F2直接发出的射线,因此只要是双曲面的虚焦点和抛物面的实焦点重合,就可使副反射面反射到主反射面的射线被抛物面反射成平面波辐射出去。
天线相位中心的概念是天线辐射源所辐射出去的电磁波在离开天线一定距离后,其等相位面近似为一个球面,该球面的球心即为该天线的等效相位中心[10-11]。从物理现象上解释,从远区场向天线看去,所有电磁波好像是从相位中心那点发出,相位中心相当于等效源点[12],所以用它作为测距起始参考点。但是对卡塞格伦天线而言,辐射源(馈源)F1辐射的球面波经过副反射面和主反射面后变为平面波,因为经过2次反射,所以无法用天线的相位中心作为测距距离起始参考点,但球面波变为平面波后,其行程相等,呈现同相场,形成如图2所示的等相位面,可以取等相位面的中心作为测距距离起始参考点。因为从天线设计中可以得到图1中相关数据,所以在本系统取天线口面中心为测距距离起始参考点。
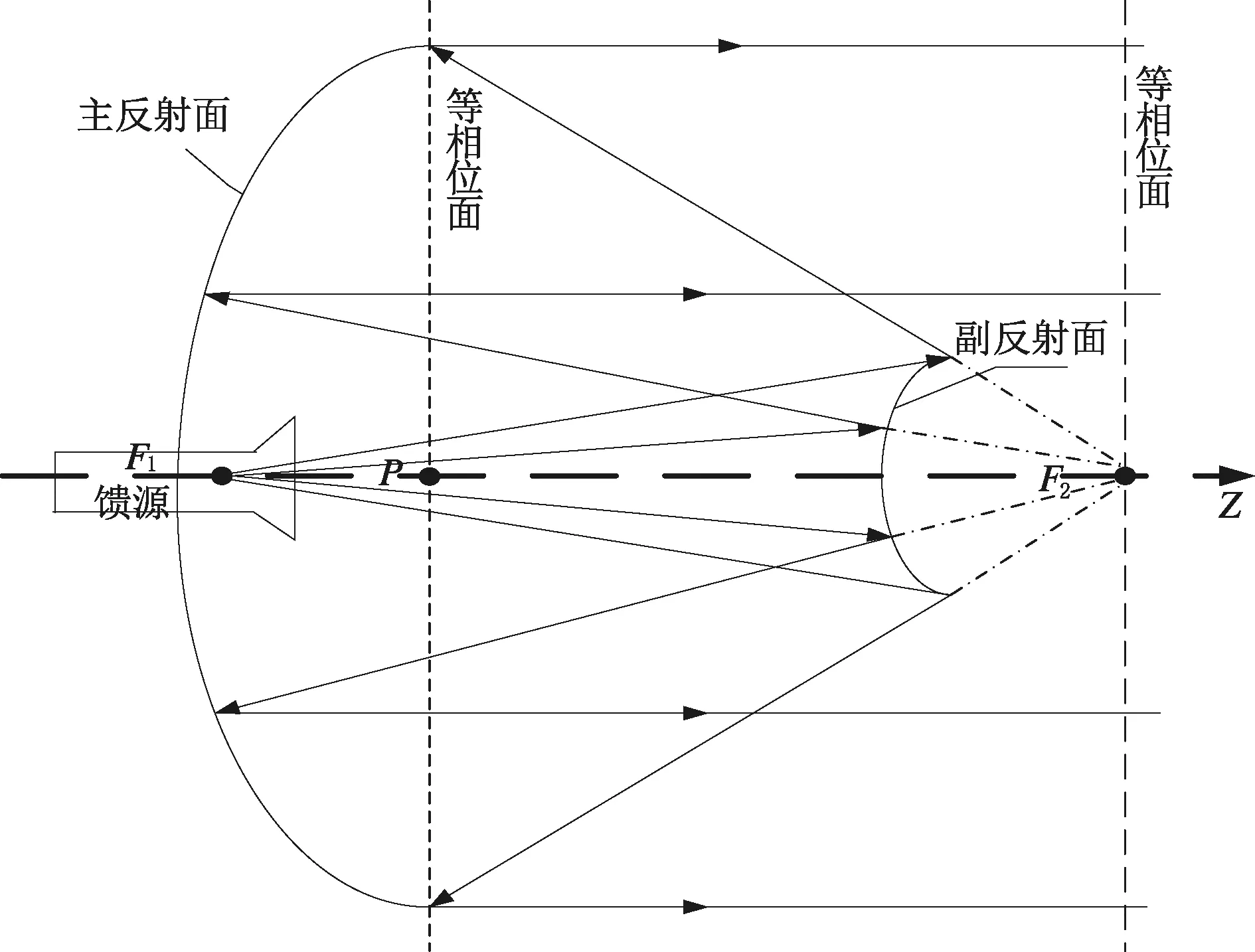
图2 卡塞格伦天线电磁波传播
3 站址坐标测量点的确定
几何法测距定轨最基本的原理就是通过测量地面至少3个位于不同地方的地面站到卫星的距离进而确定出卫星的位置和轨道,那么各个站准确的大地坐标是前提,所以在建站时需要将各个站的大地坐标测量点确定并精确测量。
从理论上讲测距距离起始参考点应该作为站址坐标测量点,但是该点随着天线跟踪不同的卫星会有变化,所以在站址测量时一般选取固定的点,比如天线的旋转中心来测量。天线有3个轴,方位、俯仰和馈电轴,一般的全方位天线这3个轴是相交在一点的,该点就是旋转中心,如图3所示。如果以旋转中心为坐标测量点,那么在天线旋转时,天线口面中心将会围绕旋转中心形成一个球面轨迹,如图4所示。

图3 全方位天线示意
设O为坐标测量点,P为天线口面中心,D表示测距信道和终端。FY-4卫星测距站测距的工作过程是首先对标校塔C测距,P到标校塔C的距离PC提前标校好,标校测距的结果是DPC的距离,减去PC的距离就得到设备的零值PD,当天线对准卫星S测距时,测距结果减去设备零值PD,就得到PS的距离值。但随着天线跟踪不同的卫星S1时,其天线口面中心大地坐标是变化的,如图4中P1,这样就无法应用到实际工程当中。

图4 全方位天线测距示意
以天线旋转中心O作为坐标测量点,该点是固定不变的。但是测距信号不通过该点,需要将距离核算到该点后才能用于轨道确定和预报。对全方位天线而言,距离起始参考点与坐标测量点之间的距离是固定不变的,就是球面的半径R。坐标测量点O在馈电轴反向延长线上,所以将距离起算点P到目标S的距离加上R,就是坐标测量点O到目标S的距离。
FY-4卫星测距站天线,如图1所示,方位轴、俯仰轴和馈电轴不相交,没有固定的旋转中心。但是基于上述测量原理,从实际天线结构及便于精确测量大地坐标的目的出发,可以选取不随着天线的转动而变化的固定点,于是在实际测距过程中选取方位轴上最靠近天线口面上的一个固定点O作为测量点,天线口面中心P为测距起始参考点,这样当天线旋转时,测距起始参考点围绕坐标测量点将无法形成完美的球面,它们之间的距离不是固定值,将会随着天线的转动而变化,需要进行距离修正。
4 距离起始参考点到坐标测量点的距离修正及应用
4.1 距离修正算法
如图1所示,选择天线方位轴上的一点O作为坐标测量点,天线口面中心位置P为距离起始参考点。设坐标测量点O到俯仰轴所在平面的水平距离为L1,垂直距离为L2,俯仰轴所在水平面到P所在等相位面的垂直距离为L3,俯仰轴到P所在馈电轴的水平距离为L4,馈电轴与俯仰轴所在水平面交点为M,俯仰轴中心点为D。其中L1、L2、L3及L4在天线设计中为已知距离值。
对距离起始参考点和坐标测量点之间进行距离修正。以坐标测量点为坐标原点,正南水平方向为X方向,垂直向上的方向为Z方向,右手法则得到Y方向,建立直角坐标系。由于地基与天线连接的平面是水平的,即天线的方位轴与Z轴重合。当天线工作于北半球,和卫星通信时,天线的转动范围一般以正南方向为基准,向东西各90°。所以定义天线的方位角以正南为0°,向东转为正,向西转为负,并记为θAZ。天线的俯仰角以水平指向为基准,向上转为正,并记为θEL。如图5所示,其中M1、D1和P1是M、D和P在X-Y平面上的投影。
根据图5所示几何关系,可得:

图5 坐标测量点到距离起始参考点核算坐标示意
(1)
(2)
(3)

则可以求得坐标测量点O到卫星S的距离:

(5)
(6)

4.2 修正结果分析及应用


图测量值随仰角变化


表1 FY-4测距站天线指向不同轨道位置的卫星时的d值
5 结论
本文分析了FY-4卫星测距站简易半转台天线的特殊结构,结合卡塞格伦天线工作原理,确定出测距距离起始参考点和坐标测量点,并给出距离起始参考点到坐标测量点的距离修正算法。结合FY-4静止气象卫星及其测距站实际分布情况,分析了5个测距站对着不同轨道位置的卫星时的修正结果,并根据结果给出了在工程实践当中的实施方法,该方法已经应用到FY-4卫星测距定轨作业当中,从使用效果看坐标测量点和测距距离起始参考点选取合适,修正方法正确,定轨结果满足定轨精度要求。