BDS卫星钟时频特性分析研究
2021-06-19张健铤张晓博李忠华
张健铤,张晓博,董 哲,李忠华
(1.北京卫星导航中心,北京 100094;2.中国科学院精密测量科学与技术创新研究院 大地测量与地球动力学国家重点实验室,武汉 430071)
0 引言
基于国家安全和经济社会发展需要,我国自主独立建设了北斗卫星导航系统(BeiDou navigation satellite system, BDS),BDS也是继全球定位系统(global positioning system, GPS)、格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)之后的第三个成熟的卫星导航系统[1]。BDS包含地球静止轨道(geostationary Earth orbit,GEO)、倾斜轨道(inclined geosynchronous orbit, IGSO)和中圆地球轨道(medium Earth orbit,MEO)三种不同轨道的卫星。BDS搭载了我国自主研发的高精度小型原子钟,其中北斗卫星导航(区域)系统即北斗二号(BeiDou navigationsatellite (regional) system, BDS-2)搭载的卫星钟,均为国产铷原子钟,北斗三号全球卫星导航系统(BeiDou-3 navigation satellite system, BDS-3)搭载的卫星钟,为国产铷原子钟和国产新型氢原子钟。由于卫星所处的高度、运动状态以及环境存在差异,使得不同轨道的卫星钟性能表现出不同的变化特征[2]。与卫星广播星历相比,高精度的精密卫星钟钟差,更能满足在轨卫星钟钟差特性分析的需要。因此,为了改善BDS的服务能力,有必要根据 BDS的卫星轨道特征和原子钟的物理特性,对BDS卫星钟钟差的特性进行分析[1]。
卫星钟差与轨道密切相关,卫星钟差会吸收轨道径向的误差,因此卫星钟差数据中会呈现出一定的周期特性[3-4]。诸多学者对BDS卫星钟差的周期特性进行了深入研究,如文献[5]研究了 BDS GEO卫星钟差的周期特性,发现其周期分别为24、12、8、6 h;文献[6]基于近一年的钟差数据,全面分析了BDS卫星钟差数据的周期特性,发现BDS GEO卫星钟差的三个主周期依次为12、24和8 h,IGSO卫星钟差的三个主周期依次为24、12和8 h,MEO卫星钟差的三个主周期依次为 12.91、6.44和24 h;文献[7]也指出,卫星钟差存在显著周期项,主要周期分别近似为轨道周期的1/2倍、1倍或2倍。这些研究都充分证明了BDS卫星钟差中显著存在周期项,本文利用标准时频理论,分析了BDS卫星钟周期项的时频特性,并利用具有良好鲁棒性的无为方法[4],对BDS卫星钟差中显著存在的24 h周期项进行了提取,发现其幅值存在显著变化。
1 BDS星载原子钟
高准确度、高稳定度的原子频标是时间系统的核心,也是确保高精度导航定位的关键。原子频标作为卫星导航系统有效载荷的核心部分,其性能直接决定着导航定位的精度和时频传递的精度[8]。因此,有必要对星载原子钟的在轨性能特征进行分析研究,从而为定位、导航、授时(positioning,navigation and time, PNT)服务提供保障。
截至2018年年底,BDS-3基本系统建成并提供全球服务,在轨工作卫星已达33颗,其中包含15颗BDS-2卫星和18颗BDS-3卫星,具体为5颗地球静止轨道卫星、7颗倾斜地球同步轨道卫星和21颗中圆地球轨道卫星。至2020年6月23号,BDS已经发射完55颗导航卫星,BDS导航卫星发射全部完成,BDS卫星钟在轨情况如表1所示。

表1 BDS卫星钟在轨情况[9]
2 时频分析方法
2.1 标准时频变换理论
标准时频变换(normal time-frequency transform,NTFT)理论,自2007年提出以来,在地球自转参数、卫星钟差等方面得到了广泛的应用[10-14]。
对于函数f(t),其时频变换为

式中:τ和ϖ分别为时间因子和频率因子,线‘-’表示共轭,R为实数域,“||”为取模。
如果式(1)中变换核ψ(t,)ϖ的傅里叶变换

满足:

则称式(1)为标准时频变换。
典型的NTFT核函数通常可以表示为

式中,i为虚数符号;Ω(R)为标准窗w(t)的函数空间;尺度因子μ(ϖ)为任何情况下都不一直为0的函数,比如为:ϖ,ϖ2/3,ϖ5等。若μ(ϖ)=1,则式(2)为相位无偏的加博尔(Gabor)变换(Gabor transform, GT),若μ(ϖ)=ϖ,则式(2)为标准的小波变换(normal wavelet transform, NWT),即

在式(5)和式(6)中,若窗函数的傅里叶变换满足式(7)的条件,则该窗函数为标准窗。式(7)的表达式为
窗函数w(t)通常选择标准的高斯窗,其表达式为

式(8)中的σ>0,因子σ的设置至关重要,该参数直接影响NTFT的时频分辨率。
2.2 无为方法
为了从标准时频谱上简洁、高精度地获取调和函数和时变调和函数,文献[11, 14]提出了无为方法,该方法本质是一种线通滤波器,是一种对调和函数和时变调和函数的估计。
无为方法的准则如下:调和函数h(t)表达式为

将式(7)代入标准时频变换,即可得到


式中:A为复数幅值;常数β为角频率;Δ∈ [ 0,2π)为初始相位;(βt+Δ)为瞬时相位;∀为“任何情况下”,“⇔”为“当且仅当”。
3 BDS卫星钟时频分析结果
3.1 数据来源
本文数据采用的来源于武汉大学卫星导航定位技术研究中心[9]发布的间隔 30 s,从 2020年 3月1日至2020年5月23日一共84 d的BDS-2卫星钟差数据数据,为了更好的分析BDS卫星钟周期项的时频特性,本文选取其中没有明显异常的49天数据作为分析对象。
3.2 时频分析结果
针对BDS卫星钟差数据,首先利用高次多项式(文中采用四次多项式)消除趋势项,然后利用NTFT得到标准时频谱,如图1所示。
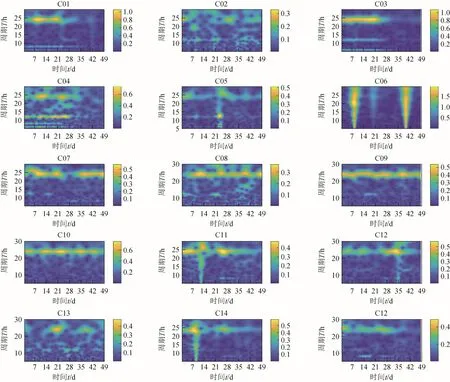
图1 BDS-2卫星钟的时频
本文分析了正在运行的、在轨的 C01至 C14及C16号卫星的钟差,从图1中可以看出,除C06号卫星受异常值干扰外,其它BDS卫星钟都存在显著的24 h周期项,部分卫星钟存在12、8、6 h周期项(如C04号卫星)。
由于24 h周期项普遍存在BDS卫星钟差中,本文采用无为方法对其进行提取,得到选取 BDS卫星钟差的24 h周期项,如图2所示。
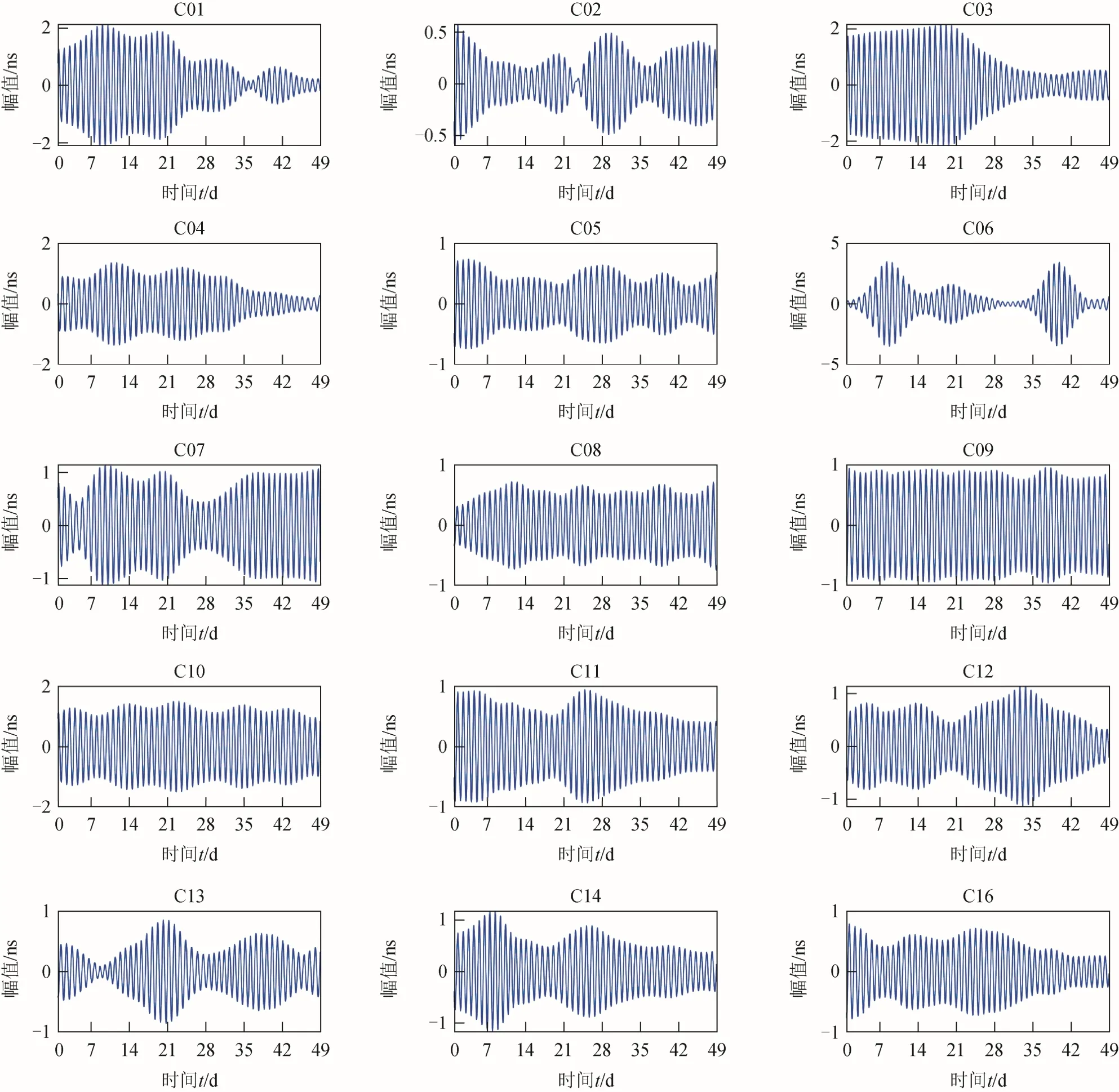
图2 BDS卫星钟的24 h周期项
从图2中可以看出,BDS卫星钟的24 h周期项,幅值最大为2 ns(如C01、C03号卫星),普遍为1 ns,最小为0.5 ns(如C02号卫星),C06号卫星由于受异常值影响较大,因此幅值大于2 ns的部分为不可信部分。另外,从图2还可以看出,BDS卫星钟的24 h周期项幅值存在显著变化。
4 结束语
本文利用标准时频变换理论对选取的BDS-2卫星钟的时频特性进行了分析,并对显著存在的24 h周期项进行了有效提取,得到如下结论:
1)BDS卫星钟都显著存在24h周期项,部分卫星钟还存在12、8、6 h周期项;
2)BDS卫星钟的24 h周期项幅值普遍在1 ns左右,最大值为2 ns,最小值为0.5 ns;
3)BDS卫星钟的 24 h周期项幅值存在显著变化。
随着BDS-3卫星钟开始启用,其时频特性需要进一步分析,对于BDS卫星钟差周期项幅值出 现幅值变化的原因还需要进一步研究。
