多圈绝对位置传感技术研究
2021-06-18袁菲
袁 菲
(深圳万讯自控股份有限公司,深圳 518000)
0 引言
在工业自动化控制领域,有大量往复运动的场合,需要得到精确的位置信号。例如纺织机械、灌溉机械、印刷造纸、水利闸门、港口起重机械、钢铁冶金设备等。在当前热门的机器人技术和汽车应用中,由于电动助力转向和电机位置传感,许多应用都需要检测旋转目标的角度。角度检测可实现这些设备和精密仪器精确控制。为了满足位置精度的要求,运动部件还需要设计反馈系统,形成闭环控制,最终达到误差控制的目的[1]。
本文通过详细比较各类多圈旋转的位置检测传感技术的原理和优缺点,分析多圈旋转的位置检测传感技术发展,为不同的应用场合选择使用多圈位置传感技术提供参考。
1 导电塑料电位器
导电塑料电位器是20 世纪50 年代后期出现的一种以导电塑料为电阻体的碳质电位器[2],是自动化设备上应用较广的旋转位置检测装置。
①原理。
导电塑料电位器的功能是把一个机械位移转换成电气信号,并且该信号能够与机械运动成正比。简单地说,电位器就是一个滑动变阻器。虽然通过检测滑动电阻阻值也可以获得位置百分比,但由于电刷与电轨的摩擦运动,会随运行时间磨损造成相同位置阻值的变化,从而影响测试的准确度。为了避免阻值变动带来的位置变化,采用电压分配则稳定很多。电位器的阻轨两端连接到稳定的直流电压(输入电压Ui),电刷装配也连接到激励器,使塑料阻轨产生一个分配电压(输出电压Uo)。电位器工作原理如图1 所示。

图1 电位器工作原理图Fig.1 Potentiometer working principle
在测量外部旋转或者直线运行位移时,通过机械传动(齿轮传动,链条传动等)将外部位置转化成电刷在阻轨中的运动,使机械位移与电刷位置成正比,即被测物当前位移百分比=。通过分析比值的变化是增多还是减少,即可简单识别正转和反转的方向。
②优点。
导电塑料电位器作为一个电压分配器,可以不必过多考虑阻轨上的总电阻的准确度。这是因为温度波动只对电阻产生作用,不会影响到测量结果。工业使用的传感器要求性能出众、价格便宜,并且可在苛刻环境(例如-40~+150 ℃)下工作。
③缺点。
多圈行程压缩原理如图2 所示。
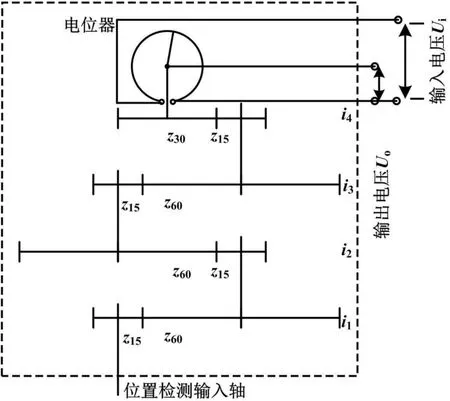
图2 多圈行程压缩原理图Fig.2 Schematic diagram of multi-loop stroke compression
阻轨与电刷为接触摩擦,随着动作次数而磨损,有固定死区、回差大。对于多圈运动场合,需要增加减速齿轮组,将多圈全行程缩到导电塑料的一圈有效行程里。圈数越多,齿轮组减速比越大,分辨率越低。以一个U 圈(如图2 例,U=100 圈)的绝对位置检测为例,使用一套多级减速传动齿轮组减速比i=i1×i2×i3×i4==128,将U 圈全行程压缩到单圈内,则全行程压缩后角度A=×360°=281.25°。而阻轨有效电气角度B(通常一个带止位的单圈电位器的有效机械角度340°,阻轨有效电气角度320°),所以全行程在阻轨中的使用率100%≈88%。假如单圈电位器的分辨率为n°(假设为0.1°),现在多圈行程分辨率就降低为128=14.54°。
2 增量式位置编码器
为了解决电位器的几大缺陷,出现了非接触式的光电编码器和磁角度传感器等多种方案。非接触式通常具有无磨损、精度高、无固定死区、回差小等特点[3]。编码器是一种降旋转转换程一串数字脉冲信号的旋转式传感器[4]。增量式位置编码器是将位移转换成周期性点信号,再把这个电信号转变程计数脉冲,用脉冲的个数表示位移的大小。脉冲信号的产生可以使用光电感应式、磁开关(霍尔开关或干簧管)等作为脉冲发生装置。单通道增量式位置编码器使用一个脉冲发生器,只能产生一组脉冲序列。A、B相编码器内部有两组脉冲发生装置,输出相位差90°的两组脉冲序列。正转和反转时,两路脉冲的超前和滞后关系刚好相反[5]。在A、B相编码器基础上再增加一组,每转1 圈产生1 个脉冲,通常称为Z相或者C相,也叫作零位脉冲或者索引脉冲,作为零位参考位,专门用于基准点定位。
①原理。
增量式位置编码器输出三组方波脉冲A、B和Z相。A、B两组脉冲相位差90°正转和反转时两路脉冲的超前、滞后关系刚好相反,很容易识别出转轴方向。三方波脉冲相对编码原理如图3 所示。
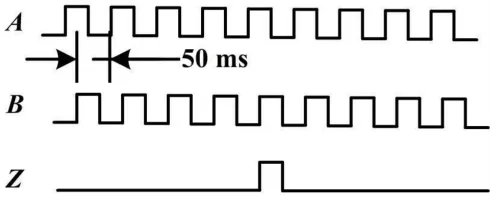
图3 三方波脉冲相对编码原理图Fig.3 Principle of relative coding of three-wave pulse
由图3 可知,在B相脉冲的上升沿,正转和反转时A相脉冲的电平高低刚好相反,因此可以识别出转轴旋转方向。Z相为输入转轴每转一圈产生一个脉冲,用于基准点定位,也用于系统清零信号或坐标原点,以减少测量的积累误差。
②优点。
增量式位置编码器原理构造简单,机械平均寿命长,抗干扰能力强,可靠性高,适合长距离传输。电子增量通过电池记忆的好处是可省掉一组机械齿轮,经济、体积小且没有圈数限制。这种脉冲编码器的零点是随机的,由上电时启动或者系统清零开始记录,所有的位置都是相对零点的一个固定计数。转动一圈会输出固定的脉冲数,即分辨率。无论旋转多少圈,它的分辨率都不会降低。需要增加测量精度时,除了单纯的增加一圈内脉冲数这种方法外,还可以采用4 倍频方式,即分别在A、B相波形的上升沿和下降沿计数,分辨率可以提高4 倍。
③缺点。
增量式位置编码器的最大缺点是零点是相对的,断掉主电源再重新上电后,原来的零点就消失了,所有的脉冲计数都清空。此时,需要增加电池蓄电才能保持原来的零点和脉冲计数,记录位置变化。由于电池低功耗的要求,移动的速度和范围其实是有限制的。另外,加上电池的因素,其可靠性还是存在疑问的。尤其是如果计圈发生失误,反而无法找到原来的绝对位置。
3 绝对位置编码器
为了弥补相对脉冲编码器的零点相对这个缺点,同样采用光电脉冲原理,不受掉电记录影响的绝对位置编码器应运而生。其依旧由光源、码盘、接收元件、放大转换电路等组成,通过光电信号扫码分度盘上的二进制码刻度,以准确定位物体的绝对位置值。这是一种在任何时刻、位置均能够对机械位移进行测量的编码器。
①原理。
绝对位置编码器的关键在码盘上。光码盘是在一个圆盘上刻出由许多道光通道。一圈为一个光通道,每圈里白色格为刻出光格(可读取为1)、黑色为暗格(可读取为0)。每道刻线从中间往外圆扩展依次以2 线、4线、8 线、16 线……编排。这样,在编码器的每个位置,通过读取每道刻线的通、暗,可获得一组从20到2n-1的唯一二进制编码,也称格雷码。这就是n位绝对编码器。假设n=5,码盘上由内到外有5 圈码道,对应获得一组2(5-1)脉冲,输出编码11111~00000,称为5 位绝对编码器。五位绝对位置编码器原理如图4 所示。
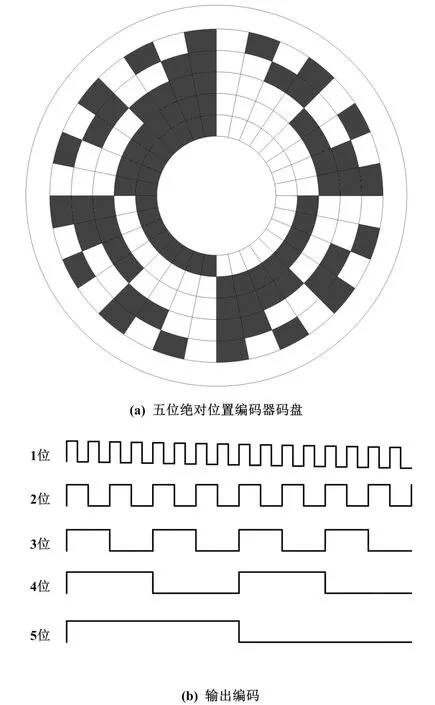
图4 五位绝对位置编码器原理图Fig.4 Principle of five absolute position encoder
编码器生产厂家运用钟表齿轮机械原理,当中心码盘旋转时,通过齿轮传动另一码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围。这样的绝对编码器称为多圈式绝对编码器。
②优点。
绝对位置编码器由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。其测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点即可,大大简化了安装调试的难度。相对增量式位置编码器,因为绝对位置编码器会锁定轴的位置,编码器通电后,能立即获知这一位置,无需等待归位或完成校准序列。即使在编码器关闭时轴被转动,旋转轴也可以在启动时或断电后更快获取所需的位置数据。绝对位置编码器的系统通常不易受电气噪声的影响。这是因为它们通过从二进制编码器读取错误检查代码获取位置,或通过串行总线获取数字化位置,而不需要像增量式位置编码器那样对脉冲计数。且多圈绝对位置编码器是在单圈编码器的基础上通过机械传动原理结构制作而成。当中心光栅码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围。它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
③缺点。
绝对位置编码器结构复杂,成本高。当码道过多时,容易发生串码、漏码等情况,造成数据出错。
4 磁感应绝对位置编码器
区别于常见的光电编码器,根据磁感应原理的磁编码器将磁霍尔开关与齿轮组搭配,可以实现简单、有效的编码[6-7]。
(1)原理。
随着霍尔开关在设计应用的增多,在智能表计数方面也出现了它的身影。霍尔开关是一种有源磁电转换器件,它使用霍尔效应原理把磁输入信号转换成电信号。霍尔开关使用其数字输出功能,按感应方式可以分成以下4 类。
①单极性霍尔开关。当一个磁极靠近它,输出低电平信号,磁场磁极离开它输出高电平信号。单极性霍尔开关会指定磁极(N 极或者S 极)感应才有效。
②双极性非锁存型霍尔开关。其通常在S 极磁场强度足够的情况打开,N 极磁场强度足够的情况关闭。但如果磁场被移除,则其随机输出。
③双极性锁存型霍尔开关。通常在S 极磁场强度足够的情况打开。如磁场被移除,则其继续保持开启状态,直到N 极磁场强度足够的情况关闭。
④全极性霍尔开关。只要有足够强度的N 极或S极,其就能打开;在没有磁场的时候,会关闭输出。
根据上述原理,本文试验使用了4 组磁钢8 个霍尔开关构成一个绝对位置磁编码器。绝对位置磁编码器原理如图5 所示。由图5 可知:最右侧为主旋转轴,左侧为多个由旋转轴带动的转轮。每个转轮中心上有永磁铁。圆形永磁体呈径向磁极分布,带着几个霍尔开关形成一组如图3 所示的3 方波脉冲的编码单元。每个编码单元可以产生000~111 的8 个码。8 ∶1 的齿轮比带动下一组转轮编码单元。编码单元越多,编码数值越大,4 组就能形成有效的12 位编码。
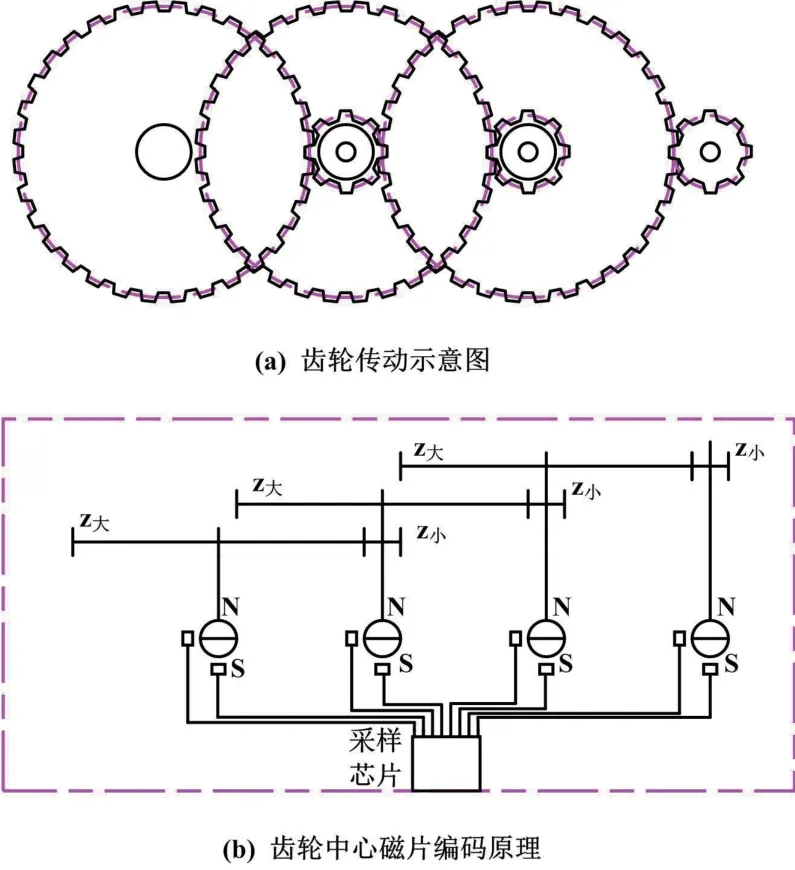
图5 绝对位置磁编码器原理图Fig.5 Principle of absolute position magnetic encoder
(2)优点。
磁感应绝对位置编码器编码简单。由于霍尔开关的大量生产和应用,成本较低,多圈编码更精确、有效。
(3)缺点。
磁感应绝对位置编码器需要齿轮组配合,编码单元越多,体积越大。
5 霍尔式角度传感器
随着技术的不断革新进步,磁编的体积越做越小,从上述只能感应最强磁极性的开关,发展到了可以感应全磁场强度的磁敏传感器,即基于霍尔原理的、通过磁场检测角度变化的霍尔式可编程角度传感器。角度传感器根据磁敏原理,转动端放置磁路发生装置。当转轴转动的时候,磁场方向方式转动,进而对固定的线路板上的敏感元件产品影响。这一影响是微小的,但是经过集成电路的处理,变成了能被电子仪器识别的电压信号或者电流小信号。而大厂将磁敏原件、集成电路封装在一起形成的芯片,就是可以直接拿来使用的霍尔角度传感芯片(简称霍尔IC)。
①原理。
通过采用霍尔效应(即当电流垂直于外磁场方向通过导体时,在垂直于磁场和电流方向的导体的两个端面之间出现电势差的现象称为霍尔效应),芯片可以感应与芯片表面平行的磁场。
使用一颗直径6 mm 的圆形径向小磁铁,相对于轴心有着如正交分布的磁场,平行在其下方的霍尔IC器件,可以感应到场强的变化。由于磁铁的磁场在霍尔元件表面不同位置的强度不同,霍尔元件感应出与其所在位置的磁场强度成正比的电压信号,电压信号经过模数转换器和数字信号处理器(digital signal processor,DSP)计算处理之后得到磁铁的位置信息,即可感应出旋转范围在 0~360°的绝对角度位置,从而真正做到360°无盲区。
根据图霍尔效应原理,制作了一个霍尔电位器,使用了齿轮传动的执行机构进行了定位测试。霍尔电位器原理框图如图6 所示。
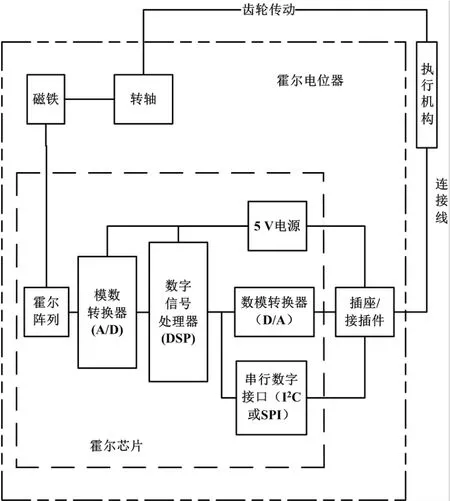
图6 霍尔电位器原理框图Fig.6 Block diagram of Hall potentiometer
霍尔电位器在借用导电塑料电位器外部结构的基础上,将内部接触式的阻轨和电刷更换为钕铁硼的径向充磁永磁体(下称“磁钢”)和一颗霍尔芯片。霍尔角度传感器与磁铁布置如图7 所示。
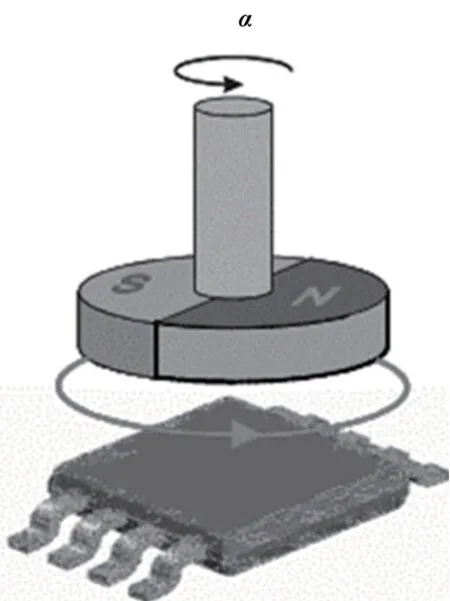
图7 霍尔角度传感器与磁铁布置示意图Fig.7 Schematic diagram of Hall angle sensor with magnet placement
通过磁钢跟随转轴的360°旋转,霍尔芯片根据径向磁钢在不同角度其磁场会成比例变化,通过测量各方向的磁通量,就能得出磁钢的位置。对于水平旋转应用,只需测量水平两方向的磁通量。
如图7 所示,当磁钢在霍尔芯片上旋转时,磁通分量Bx和By将产生两个正交的正弦波:Bx正比于余弦cos(α);By正比于正弦sin(α)。通过霍尔阵列,可以将测量到的两个水平磁通量(Bx,By)等比例转换为电压信号。两个水平磁通量与角度的关系如图8 所示。

图8 两个水平磁通量与角度的关系Fig.8 The relationship between two horizontal magnetic fluxes and angles
原始霍尔信号Vx和Vy分别与Bx和By成正比。信号放大后,通过模数转换器进行采集,然后在DSP执行以下反正切(ATAN)运算,得到角度信息:
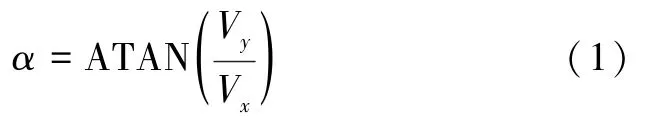
式中:Vx为X方向的原始霍尔信号;Vy为 方向的原始霍尔信号;α为角度。
式(1)突出了以下两个关键特性:①由于是取Vy和Vx的比值,因此可采用差分测量技术,信号放大后两路霍尔信号分开采集,不会影响输出角度的精度;②能对空气间隙变化、热效应影响等而引起的磁场变化进行自动补偿(同时影响两路霍尔信号,取Vy和Vx的比值时能消除)[8]。
②优点。
霍尔芯片集成了霍尔元件阵列及模拟数字(analog-to-digital,AD)转换和DSP 逻辑部件,大幅缩小了整体体积,同时提高了可靠性。由于它具有耐震动、不怕灰尘油污水汽盐雾、无接触无摩擦、使用寿命长等特点,可以广泛应用于机械变化频繁、环境恶劣的场合。图7 的霍尔电位器是360°多圈转动式的,自定义零位,单颗芯片主要用于角度的精确跟踪,得到全分辨率的测结果,在一直带电的情况下,也可以进行自转圈计数,得到多圈绝对位置。
③缺点。
由于磁场间隙变化,温度变化及老化等因素引起磁场强度的变化,所以有可能引起随温度的非线性输出,一般配合单片机进行非线性和温度校正。单颗芯片圈数计算掉电重新上电,计数会失效。
目前,12~14 位的高分辨率输出的芯片已在工业领域和汽车领域广泛应用。在部分汽车角度感应应用中,例如安全带张紧器,电子动力转向电动助力转向(electyric power steering,EPS)电机位置、旋转式换档器和油门系统等,要求在熄火状态仍具备角度位置跟踪功能。此时,可以由汽车电瓶供电,使用低功耗模式中的跟踪计数模式(降低电瓶功耗),例如跟踪180°或45°(非全分辨率)进行转动计数,保持多圈计数,得到多圈精确角度。这可保证系统无论在点火模式还是熄火模式,都能准确而持续地跟踪方向盘的位置和安全带的张紧度。
6 绝对编码和霍尔角度结合技术
在某些工业场合,没有电瓶或者备用电源,增量式位置偏码器的计数功能在断电后失效,所以其通常被称为非绝对位置多圈传感器。为保持重新上电后的多圈绝对计数,在磁角度传感器的基础上,增加编码器计数(光电编码和霍尔开关编码均可)。这也是国际上较为通用的做法。
真多圈霍尔传感器原理如图9 所示。其在图7所示的霍尔IC 基础上(左侧框外),增加了框图里的6 组光电绝对位置编码。为了缩小体积,使用了直径尽量小的齿轮,每组绝对位置编码放置了2 圈光轨,形成了22×6个二进制编码(又称12 位编码)。其可以用来计算圈数,即使掉电重启,也能立刻读出当前位置的编码,从而得到圈数位置。霍尔IC 的分辨率(例如选择12 位芯片高分辨率芯片)就是单圈有效分辨率。这就是一个4 096×4 096 的高精度真多圈绝对位置编码器。

图9 真多圈霍尔传感器原理图Fig.9 True multi-turn Hall sensor principle
①原理。
单圈角度由磁性编码器完成,圈数通过几只光电编码盘记忆,所以编码器记忆的是绝对位置信息。无论编码器上电与否,编码器都能记忆量程范围内的任何角度和圈数。编码盘记忆的是格雷码信息,通过CPU 转换成自然二进制码输出。
②优点。
多圈绝对位置编码器可以记忆几千上万圈,掉电不丢失信号(不需要电池供电,机械记忆),机械零位可任意设定。其抗干扰能力强,响应速度快。
③缺点。
由于多圈绝对位置编码器集合了磁角度传感器和光电绝对值编码器,结构复杂,成本高。
7 基于先进的差齿磁角度传感技术
霍尔原理的角度传感器日趋成熟:小小的集成芯片省去了绝对值光电编码的复杂操作,内置温度补偿在工业环境-40~+85 ℃内也可以具有优异的线性度和精度。但考虑到光电编码器计数结构复杂,且易存在因多个光敏器件可能发生某颗失效(掉码、漏码)而造成的整体安全可靠性降低的情况,可使用计算的方式规避这种风险。延伸前文通过霍尔技术检测旋转角度的方式,采用2 组芯片加上不同齿数的齿圈,计算转角度,从而得到的多圈绝对位置方法,是全新的检测多圈旋转角度的方式。
差齿旋转角度传感器原理如图10 所示。
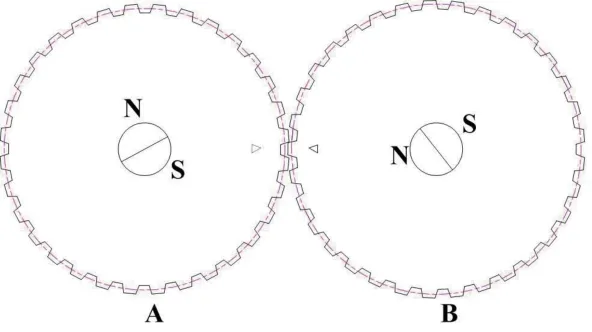
图10 差齿旋转磁角度传感器原理图Fig.10 Principle of gear differential rotation magnetic angle sensor
以图10 为例,由2 组磁钢配合2 组霍尔角度传感器。有A、B 两组齿轮,设定A 齿轮为m齿主旋转轴,B 齿轮(m+1)齿被动旋转。在每个齿轮的中央镶嵌着一个圆形磁钢。在磁钢的正上方布置着一个霍尔角度传感器。霍尔角度传感器可以检测到磁钢转动角度的变化。假设给两个芯片设定起始点,就如图10 的两个正对的三角形,当A 齿轮旋转一圈后,A 齿轮的小三角回到原位,而B 齿轮的小三角则跟A 三角有了一个角度差,即A、B 齿轮间将形成转差。当A 轴转动(m+1)圈后,B 齿轮与A 齿轮的转差为360°,相当于A、B 两个齿轮又回到起始位置。所以此组齿轮的方案可以进行(m+1)圈内的绝对位置检测。
①原理。
通过一组2 个齿轮的齿差或者直径差,可以计算出旋转一圈后两个圆的角度差。角度差将决定有效圈数。通过改变A、B 两个齿轮的齿比,可获得更多种圈数的绝对位置测量。通过改变A、B 两个齿轮的齿数,可以改变测量的精度。此外,也可以通过增加C 齿差齿轮或者更多齿轮,得到更高转圈数的绝对位置测量。行程即使在断电时发生改变,霍尔角度传感器也能在上电后分辨出行程的变化量和方向,实现多圈精确绝对位置。该方法原理十分简单,计算有效、可靠。
③优点。
采用霍尔非接触式测量,结构布置简单,仅需要至少2 个齿轮配合磁钢、霍尔传感器就能实现设定量程范围内的绝对位置测量,无需供电保位。该方法没有复杂的结构,起始位置和终点位置可以自行任意设定,操作方便。与编码器和脉冲计圈相比,通过记录转差方式获得绝对位置,减轻了处理器负担,增加了可靠性,抗干扰能力强。该方法亦可实现远距离传输。
④缺点。
对于齿轮间隙需要补偿计算,更高圈数需要配合更多减速比或者齿差,因此该方法会稍微增大体积。
8 结论
位置反馈系统对精确控制精密仪器的位移运动有决定性作用[9-10]。本文论述了多种常见的多圈位置编码方式的原理和现状,通过对更多先进技术的解读,采用自制原理试验举例,阐释了技术实现性,为广大需要多圈绝对位置测量技术的应用打下理论实践基础。技术的发展不是越复杂越高精越好,实际应用者应该根据自身产品特点、应用环境、使用频次、精度、成本选择合适的检测方式,才是设计的本源。一味地追求更为复杂的算法,并不能给社会创造更多的价值。技术的发展使旋转多圈绝对位置的检测更精确、体积更小、成本更低、使用更简单。
