挖掘机生产商自动识别系统的构想与软件初步设计*
2021-06-18李秋彤
李秋彤
(长安大学工程机械学院,陕西 西安 710021)
随着社会智能化程度的不断提高,智能控制技术在工程机械控制中的运用越来越广泛,工程机械产业的智能化进程不断加快[1]。为使机群中挖掘机的协同工作效果达到最佳,需要加强对挖掘机的智能化管理和科学调度,挖掘机制造商识别系统的设计与完善,对于实现工程机械的智能化、集群化管理具有重要意义[2]。近年来,深度神经网络开始走向实用化,随着深度学习的快速发展,计算机视觉领域中各种视觉处理任务的效果得到了极大提高[3]。为了取得进一步突破,许多科研人员开始从人类视觉特性角度出发,结合额外知识表示进行图像处理[4]。本文选定Alexnet深度学习网络进行训练,通过调整模型的参数,探究特征提取网络参数改变对挖掘机生产商识别效果的影响。
1 绘制软件初步设计流程图
绘制流程图有助于更加顺利地完成课题,在正式开始软件设计流程之前,有必要先绘制软件设计流程图,软件初步设计流程图如图1所示。

图1 软件初步设计流程图
2 图像识别网络模型的选用
本文主要以挖掘机为研究对象,识别任务目标体积较大,因此需要网络适合识别大中型目标。本文所使用的挖掘机数据集较小,要求网络具有良好的特征学习能力和较强的抗过拟合性能,同时要求尽可能提高网络识别的训练速度,并且还对网络的可移植性有一定的要求[5]。因此,选择较为基础且易于掌握的Alexnet作为本次实验的基础框架。
3 图像样本数据集的建立
1)图像数据集的构建。本文依据不同的挖掘机生产商图像建立了一个包含18家挖掘机生产商图像的样本数据集,共计搜集了900张图片,基本包含了工程实际生产中常见的挖掘机生产商。由于资源搜集能力的限制,每一家厂商搜集到50张照片。为了保证识别的精度,每个图像中仅有一辆或两辆挖掘机,并且图像中的生产商特征没有重叠或损坏,如图2所示。

图2 数据集中的图像举例
2)图像数据集的标签化处理。由于深度学习算法属于有监督的学习方式[6],需要采用有标签的样本图片进行训练,采集得到的各型挖掘机图像并没有标签,因此需要对所搜集的挖掘机图像进行人工标定。识别的目标为挖掘机生产商,理论上打标签的对象为挖掘机身上的生产商标志,但是在实际工程应用中需要识别整个挖掘机,本文创新性地设计了“整机+生产商标志”的组合数据集,既解决了实际工程中的整机识别问题,又保证了识别精度。为了测试不同标签方法的识别效果,本文尝试建立了3种不同的数据集即生产商标志数据集、“整机+生产商标志”数据集和整机数据集,本文分别对3种数据集进行网络训练,并根据最终的训练结果选定最优的数据集方案。
3)图像数据集的归一化处理。网络模型中的训练数据来自于imagelabeler裁剪出来的图像,裁剪出来的图像大小并不能做到完全一致,所以存在图像规格不统一的问题。又因为Alexnet网络模型所要求的图像输入尺寸为227×227×3,所以本文对搜集到的挖掘机图像进行了归一化处理,统一了数据集中图像的规格。
4)图像数据集的扩充。本文通过旋转图像、添加噪声等手段进行了图像数据集的扩充。
通过以上步骤,最终生成来自18家挖掘机生产商的4500幅图像。每个生产商有250张图像,每张图像的尺寸为227×227×3。
4 网络模型训练
采用迁移学习方法训练得到的网络模型识别精度更高、训练效果更好[7],因此本文采用迁移学习方法。在对本次实验的数据集进行训练后,通过不断调整网络的参数,使网络与本文数据集更好匹配,提高训练精度,减少训练时长,最终找到使得网络的性能和实用性达到最优的一组网络模型。
通过不断调试Alexnet网络的主要参数,得到了若干组网络模型,其中权重为5、偏差为5、Minibatchsize为10、MaxEpochs为6、学习率为0.0001、测验频率为10的一组网络模型的准确率为87.89%,为本次试验最佳结果。
5 优化对比实验
1)挖掘机生产商类别数的对比实验。分别使用挖掘机生产商类别数为9家、18家、27家的数据集进行训练,三类数据集每类的图像数量一致。在对比实验中的三次训练使用了相同的参数,训练结果如图3、图4、图5所示。
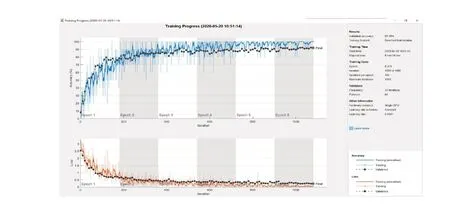
图3 9类生产商识别结果

图4 18类生产商识别结果
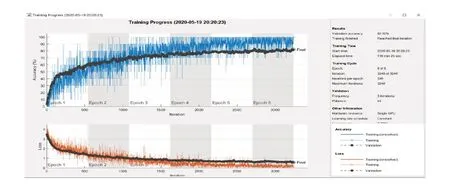
图5 27类生产商识别结果
由训练结果可知,在使用相同网络和参数的情况下,使用9组生产商的数据集的识别精度为91.78%,训练时间为8 min24 s;使用18组生产商的数据集的识别精度为87.89%,训练时间为23 min10 s,使用27组生产商的数据集的识别精度为82.15%,训练时间为116 min25 s。随着输入训练的数据集的类别增多,网络的识别精度逐渐下降,且训练时间不断上升,综合考虑训练时间与训练精度的影响,以及最终工程应用中需要的识别种类,决定选用18家目前市面常见的挖掘机生产商作为数据集,既能够保证较高的识别率和训练速度,又可以涵盖目前市面上的大部分生产商。
2)使用不同标签标定数据集的对比实验。分别使用只有生产商标志的数据集、“整机+生产商标志”的数据集以及挖掘机整机的数据集进行训练,保持三类数据集的图像数量相同,并且在对比实验中的训练使用了相同的参数。生产商标志的数据集中共18类,每类有250张生产商标志图像,训练后精度为91.33%;挖掘机“整机+生产商标志”的数据集共18类,每类有250张图像,其中整机图像200张,生产商标志图像50张,训练后精度为87.89%;挖掘机整机的数据集共18类,每类有250张整机图像,训练后精度为83.33%。
在使用相同网络和参数的情况下,使用仅有生产商标志的数据集精确度最高,但若输入挖掘机整机图像其无法识别挖掘机生产商,只能输入生产商标志进行识别,“整机+生产商标志”数据集识别率明显高于仅有挖掘机整机的数据集。实验结果表明,使用挖掘机整机与生产商标志混合的数据集可以有效提高训练效果。
6 总结
文章对挖掘机生产商图像识别系统软件设计展开研究。介绍了挖掘机生产商自动识别系统的建立过程,对图像样本数据集的建立和模型训练及数据对比都进行了较为详细的介绍。并采用基于深度学习技术的网络Alexnet,通过实验对网络参数进行了测试与优化,提高了挖掘机生产商的识别精度。从实验结果来看,本算法可以满足实际工程生产的要求。