基于橡胶波纹管的柔性机械手臂设计
2021-06-16林本末彭熙凤王海涛
林本末,彭熙凤,王海涛
(大连海事大学 船舶与海洋工程学院,辽宁 大连 116026)
引言
随着机器人技术的发展,机器人从工业用途逐渐拓展到医疗、搜救、农业与服务行业等,传统的离散关节型机器人具有负载能力强、响应速度快、位置精度高的优点,但也具有结构复杂、灵活性差的缺点。而柔性连续型机器人,可通过气动、化学能或智能材料驱动等驱动方式改变执行器的体积和形状,以改变机器人的姿态或实现特定动作,去适应复杂的环境,同时机器人柔软的本体材料使其具有良好的人机安全协同工作的能力,在多种工作领域能更好的保证协作人员的人身安全[1]。
由象鼻及章鱼触手等生物器官而激发的灵感,柔性连续型机器人是目前仿生领域的研究热点,德国Festo公司在研发柔性机器人的领域取得了令人瞩目的成就,如Bionic Soft Arm、 Bionic Motion Robot与仿生操作助手等都具有高度灵活的特点[2-3]。本研究设计了一种基于橡胶波纹管的柔性机械手臂原型机,建立柔性机械手臂中执行器的伸长量与其内部气压的理论模型并编制LabVIEW程序,通过实验验证模型的准确性,同时通过实验测得柔性机械手臂具有较大的弯曲角度与一定的负载能力。
1 柔性机械手臂工作原理
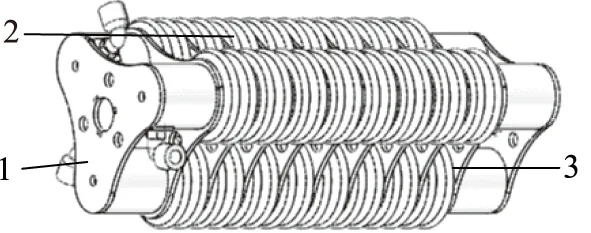
图1所示为柔性机械手臂,其结构设计如下:柔性机械手臂共设计有6个自由度,由2个三自由度执行器组串联装配而成,执行器组由3个弹性体执行器并联并搭配执行器连接零件装配而成。

1.柔性机械手臂 2.实验台型材架 3.拉线位移传感器图1 柔性机械手臂
柔性机械手臂由压缩气体驱动,通过工控机编制LabVIEW程序来调整模拟量输出数据采集卡输出的电压信号,以调节电气比例阀输出的气体压力,通过调节各执行器内部气体的压力值,使执行器间产生长度差,此时执行器组产生伸长、弯曲与偏转的姿态组合,通过调整串联装配的执行器组的姿态,实现机械手臂姿态的改变。系统传感器包括拉线位移传感器与比例阀内集成的气压传感器,以测量各执行器的伸长量与内部气压值,通过模拟量输入数据采集卡进行数据采集,如图2所示。

图2 控制与数据采集系统
2 基于橡胶波纹管的柔性机械手臂设计要点
柔性机械手臂的最小执行单元为弹性体执行器,如图3所示,由橡胶波纹管、聚乳酸(PLA)执行器端盖以及拉伸弹簧装配而成。橡胶波纹管由硅橡胶制造而成;执行器两端端盖使用PLA,利用3D打印技术整体成型,端盖与波纹管连接处为过盈配合,端盖内孔尺寸大于波纹管连接处外圆周尺寸,此结构可利用执行器通气后内部的压力气体压迫波纹管紧贴端盖,增大端盖与波纹管间的摩擦力,可提高执行器的承压能力;通过两侧端盖内部的圆弧梁在执行器内部装配拉伸弹簧以压缩执行器的自然长度,可提高执行器在通气后的长度变化率,也可帮助执行器在排气后迅速恢复至自然长度。

1.执行器通气端盖 2.气动快换接头 3.橡胶波纹管4.拉伸弹簧 5.执行器密封端盖图3 弹性体执行器
将执行器以120°的间隔在圆周均布排列,搭配执行器连接板与保持架装配为执行器组[4],如图4所示。连接板与保持架均使用PLA利用3D打印技术制造,多个执行器组串联装配为柔性机械手臂。
1.执行器连接板 2.弹性体执行器 3.执行器保持架图4 单级执行器组
3 执行器组特性研究
3.1 执行器组末端位置与其中心圆弧参数关系
当单级执行器组中的弹性体执行器通气时,执行器组将产生伸长、弯曲与偏转的姿态组合,执行器组的末端平面将运动到如图5所示位置。
图5中A1,A2,A3分别为执行器组中各执行器在基座的位置,B1,B2,B3分别为执行器组中各执行器在末端的位置,O为执行器组基座中心,O1为执行器组末端中心,O00为执行器组中心圆弧弯曲中心,α为执行器组弯曲角,φ为执行器组偏转角,R为执行器组中心圆弧的曲率半径,s,s1,s2,s3分别为执行器组中心圆弧与各弹性体执行器的长度[5]。

图5 单级执行器组弯曲简化模型
设此时执行器组末端中心坐标为(x,y,z) ,得单级执行器组末端平面中心点O1的坐标(x,y,z) 由中心圆弧姿态参数(α,R,φ)表示为:

得单级执行器组中心圆弧姿态参数即弯曲角α、偏转角φ与曲率半径R见下式:
(1)
执行器组中心圆弧的长度s为:
s=Rα
3.2 弧长、曲率半径、偏转角与各执行器长度关系
基于文献[6],得单级执行器组中各弹性体执行器长度s1,s2,s3与单级执行器组中心圆弧的弧长s、偏转角φ、曲率半径R之间的关系见下式
(2)
3.3 执行器长度变化量与其内部气压关系
测得橡胶波纹管自然长度为196 mm,弹性体执行器由于装配弹簧,其自然长度压缩至140 mm。当通气执行器长度l2<196 mm时,即通气执行器长度小于橡胶波纹管自然长度时,执行器将承受压力气体的驱动力、拉伸弹簧的拉力、拉线位移传感器弹簧拉力、橡胶波纹管压缩后的反弹力、另外2个执行器弹簧的拉力、执行器保持架的阻力[7-8],如图6所示。

图6 l2<196 mm时执行器组通气受力
(3)
式中,Fp2—— 执行器所受压力气体驱动力
Fk2—— 2号执行器弹簧拉力
Fl—— 拉线位移传感器绳缆拉力,经实验测量取3.3 N
Ff—— 橡胶波纹管压缩时反弹力,经实验测量取3.0 N


Fc—— 执行器保持架阻力
其中:
Fp2=p2A
Fk2=kTΔl2
Fc=kcΔx
式中,p2—— 2号执行器内部气体压力
A—— 执行器内部气体作用有效面积
kT—— 执行器内部弹簧弹性系数,经实验测量取244.1 N/m
Δl1,Δl2,Δl3—— 1,2,3号执行器长度变化量
kc—— 执行器保持架弹性系数
Δx—— 执行器保持架形变量
其中:
A=πr2
Δx=0.091Δl2+0.001
(5)
式中,r为橡胶波纹管内部有效半径,取r=0.035 m。
联立以上各式,得:
(6)
当通气执行器长度l2≥196 mm,即通气执行器长度大于橡胶波纹管自然长度时,此时当执行器内部通入压力气体后,执行器将承受压力气体的驱动力、拉伸弹簧的拉力、拉线位移传感器弹簧拉力、通气执行器橡胶波纹管反弹力、另外2个执行器的内部拉伸弹簧拉力、橡胶波纹管被拉伸后的反弹力、执行器保持架的阻力,如图7所示。
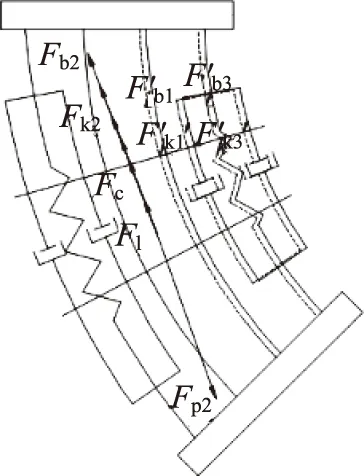
图7 l2≥196 mm时执行器组通气受力
(7)
式中,Fb2—— 2号执行器橡胶波纹管伸长后反弹力

其中:
(8)
式中,kb—— 橡胶波纹管弹性系数,经实验测量取247 N/m

Δl—— 执行器装配弹簧后橡胶波纹管长度变化量

联立以上各式,得
(9)
4 柔性机械手臂程序编制及性能测试
4.1 执行器组程序编制与实验
为精确控制单级执行器组末端平面中心的位置,需准确地控制各个执行器的长度变化量,即控制各个执行器内部气体的压力,使用PID控制算法编制LabVIEW程序,系统结构原理如图8所示。

图8 PID控制原理
被控对象为各个执行器的长度变化量,拉线位移传感器检测各执行器的长度变化量,经数据采集卡将位移值转换成电压信号送入控制模块,测量信号与设定值信号比较得到偏差,经PID控制器运算后,发出控制信号,控制电气比例阀阀出口气体压力的大小,从而实现执行器长度变化量的连续控制。
基于式(1)~式(9)编制执行器组的LabVIEW控制程序,程序运行流程图如图9所示,根据经验并经多次实验,设置PID控制参数:kp=0.385,ki=0.010,kd=0.002。

图9 执行器组程序运行流程
程序运行时,当输入执行器组末端平面中心位置坐标,程序需计算执行器组中心圆弧的弧长、弯曲角、偏转角,再计算各个执行器长度及其长度变化量,最终输出各个执行器内部所需的气体压力。同时程序可通过模拟量输入数据采集卡采集各个执行器长度变化量与其内部气体压力,与上位机计算的执行器长度变化量比较得出偏差,经PID控制器,通过配置有模拟量输出数据采集卡的工控机发出控制信号到电气比例阀中,实现电气比例阀出口的气体压力的调节,最终控制执行器长度变化量达到设定值,程序运行结果如图10所示。

图10 PID控制程序输出的长度变化量Δl
通过测试,当上位机计算得到的所需执行器长度变化量为0.06 m时,最终的输出值为0.06 m;当位置变化时,执行器长度变化量改变,长度变化量输出值能迅速达到上位机计算所得的设定值。
执行器组中单个执行器通气实验如图11所示,此时2号执行器通气,1,3号执行器未通气。通气执行器长度变化量模型计算值及气压曲线与实验测得各执行器长度变化量及气压曲线如图12所示。

图11 执行器组单个执行器通气实验
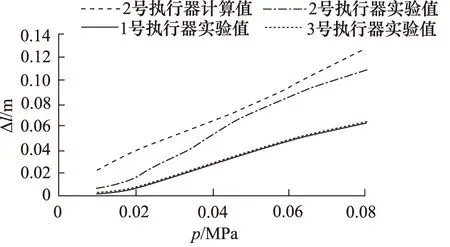
图12 执行器组中执行器长度变化量
实验结果表明,由橡胶波纹管装配而成的执行器最高可通入的气体的压力为0.080 MPa,执行器组可实现大角度弯曲变形,弯曲角度达到150°;由式(3)、式(4)所得通气执行器长度变化量计算值与实验测量值结果近似,存在误差的原因是拉线位移传感器的绳缆安装在执行器组内部的执行器外侧,与执行器中心轴线存在偏差,则长度变化量实际测量值小于执行器中心轴线长度变化量。单个执行器通气后伸长会带动另外2个未通气的执行器伸长;当执行器组中的不同执行器通入压力不同的气体时,执行器组可产生多种姿态,具有灵活柔软的特点。
4.2 柔性机械手臂程序编制与实验
柔性机械手臂可根据使用需求,由数量不等的执行器组串联装配组成。本研究的柔性机械手臂由二级执行器组串联装配而成,具有6个自由度。
编制柔性机械手臂气压控制的LabVIEW程序,程序可实现机械手臂的多种操作模式,包括手动控制、循环工作及演示模式,可分别实现机械手臂的全手动操作、机械手臂在固定工位间对工件的抓取、移动、放置等操作的循环动作与驱动原理演示功能。
最终装配完成的柔性机械手臂实验系统如图13所示,系统包括基于橡胶波纹管的柔性机械手臂、拉线位移传感器、空气压缩机、电气比例阀、配置有数据采集卡的工控机、数据采集卡端子板等设备及元件。柔性机械手臂末端装配气动柔性机械手爪,通过数据采集卡驱动继电器控制三位五通电磁换向阀两端线圈的通断电,实现末端手爪的开合动作。
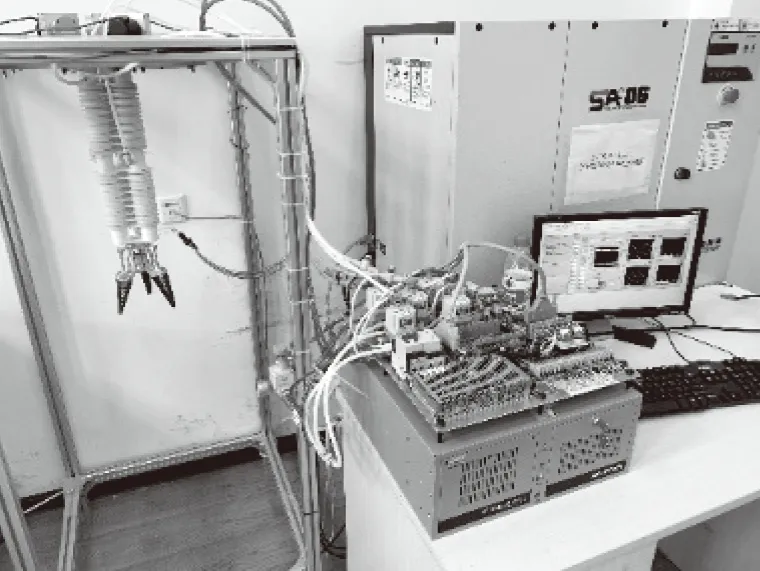
图13 柔性机械手臂实验台
测试柔性机械手臂的性能,结果表明,机械手臂可在半径为0.15~0.45 m的近似为空心半球的范围内运动,轴向最大伸长量为0.22 m,最终可实现400 g物体的稳定抓取与移动,如图14所示。

图14 柔性机械手臂带负载运动
5 结论
本研究介绍了一种基于橡胶波纹管的柔性机械手臂,主要介绍柔性机械手臂的动作原理与主要结构,建立了执行器组中执行器的伸长量与其内部气体压力的数学模型,并编制了LabVIEW程序,介绍了柔性机械手臂实验系统并对原型机进行实验测试。实验结果表明,基于橡胶波纹管的柔性机械手臂的执行器最大可承受0.080 MPa的气体压力,执行器组的弯曲角度可达到150°,执行器组中执行器的长度变化量与其内部气压的关系模型较为准确;柔性机械手臂可在半径为0.15~0.45 m的近似为空心半球的范围内运动,轴向最大伸长量为0.22 m,最终可实现400 g物体的稳定抓取与移动。
