全自动运行信号系统设计的工程优化方案研究
2021-06-16弓剑
弓 剑
机电工程
全自动运行信号系统设计的工程优化方案研究
弓 剑
(北京城建设计发展集团股份有限公司,北京 100045)
城市轨道交通全自动运行系统(FAO)根据自动化等级分为GoA3有人职守的全自动运行和GoA4无人职守的全自动运行。针对全自动运行系统“中心强化管控、故障快速恢复”的功能需求特点,阐述全自动运行的核心专业——信号系统,从GoA2级向GoA4级过渡中在系统架构和功能上优化设计方案的重要性。以中心直接管控列车为出发点,重点从中央集中管控、设备安全可靠、故障快速恢复等方面,提出了采用双活中心、全电子联锁、集雷达与视频分析技术于一体的智能探测设备的优化建议,为提高全自动运行系统的可靠性、稳定性提供参考。
轨道交通;全自动运行系统;信号系统;双活中心;全电子联锁;非接触式;障碍物检测系统
全自动运行系统(fully automatic operation system,FAO ),是利用计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的城市轨道交通系统。它是轨道交通自动化等级的最高标准,采用了轨道交通领域最先进的技术,而信号系统在全自动运行系统中起到了至关重要的作用,全自动运行带来的所有变化都要从信号列控技术展开研究。国际公共运输联盟将列车运行自动化等级分成5级,如表1所示。FAO根据自动化等级(GoA)可分为GoA3有人职守的全自动运行和GoA4无人职守的全自动运行[1]。

表1 自动化等级与运行方式对照
在目前轨道交通领域,信号系统基本都采用基于无线通信的列车自动控制系统(communication based train control system,CBTC)。CBTC系统仍然是全自动运行信号系统的不二之选,但全自动运行系统并不仅仅由闭塞制式所确定,很多系统功能都发生了变化,运行等级也从GoA2升级为GoA4。
过去10年,各大城市普遍采用的自动化等级为GoA2级,而基于GoA4级全自动无人驾驶系统还处于起步阶段,系统架构和功能还有待进一步细化。
1 全自动运行信号系统实现功能
由于全自动运行系统的自动化程度提高,系统依靠计算机系统精准的运行控制,客观上排除了在运营过程中人为因素而产生的不利影响,同时关键机电设备的主要单元均按主用和热备冗余配置,故障率极低[2]。
全自动运行是一个系统工程,涉及多个专业,其中信号系统在全自动运行中起着至关重要的作用。全自动运行指列车无人值守,需利用设备取代司机控制列车自动运行,并解决突发事件。这种特点和配置的变化,带来了功能的变化,主要有以下3方面:
1) 正线运行过程中的自动发车、自动跳跃对位、列车内部空调照明调整;
2) 自动化场段中的自动唤醒/休眠、自动洗车、断电位置记忆;
3) 侧重故障应急处置,包括蠕动模式、门对位隔离、障碍物及脱轨检测、远程紧急制动等功能。
2 全自动运行信号系统设计方案优化
全自动项目在起步阶段都是在既有设备的基础上增加各类设备来实现各种功能。信号系统作为全自动运行的核心技术,应具有更高的可靠性和可用性,各子系统均应采用必要的冗余技术,并实现主、备系统的“无缝”切换[3]。
随着近年全自动运行工程数量的增长,研究人员也逐渐意识到实现全自动运行,系统设计并不是纯粹地做加法,而应根据全自动线路车站无人、中心直接管理在线列车的特点,对信号系统的结构、功能做适应性调整,使整个系统向中央集中化、结构扁平化、设备可靠化、响应快速化的方向优化。
2.1 中央集约化
2.1.1 中心集中控制,取消站控设备
传统线路的ATC系统结构多为分散自律式,将线路分成若干个控制区域,每个控制区域设1套区域控制器及联锁主机,控制中心只设置ATS子系统的中心设备,区域控制器间及区域控制器与控制中心通过网络连接,完成全线的ATC功能,如图1所示。

图1 传统ATC系统架构
Figure 1 Traditional ATC system architecture
全自动运行系统带来运营模式最大的改变就是中心功能的增强,车辆、信号、监测、乘客服务等列车运行全过程均在中心监控下,尤其是故障后的应急处置更要中心与车辆的直接“对话”,因此中心需要了解并迅速处理设备故障,新的运维关系使得车站职责发生变化,车站向无人值守方向发展,系统结构也向中心集中控制发展,具体到信号系就是将区域控制器、联锁集中设于中心,来完成全部的列车自动控制功能,通过中心与车站远程执行单元相连,直接监控现场设备,如图2所示。
2.1.2 搭建主副“双活”中心
控制中心需负责线路运营指挥的监视和控制,不仅负责正常运营时统一调度指挥,更重要的是作为各类故障、灾害发生时的应急处置中心。
Figure 2 Architecture of a new automatic ATC system
由于全自动功能强烈依赖控制中心,如果控制中心遭到损坏,需要借鉴灾备的经验,增设备用控制中心,明确主备控制中心的切换原则并限定切换时间,确保不会因此而导致全线进入应急状态[4]。因此宜搭建副控制中心,作为灾备中心,2个中心须组建应用级双活架构,除了2套设备同时工作外,最重要的是构建它们之间远距离心跳检测机制。所谓“心跳检测”就是定时发送一个心跳帧,让对方知道自己仍“在线”。传统系统的主备双中心,由于系统平时由主中心监控,备中心只做数据上的接收,不参与控制,在长连接下,有可能很长一段时间都没有数据往来,有的节点(如防火墙)会自动把一定时间之内没有数据交互的连接切断,心跳帧就是为了维持长连接保活。
主副双活中心心跳检测原理如图3所示,在异地设置的2个中心服务器之间增加1根光缆作为心跳线,服务器软件通过心跳线来实时监测对方的运行状态。每隔一段时间向对方服务器发送1个固定数据包,服务器收到后回复1个固定数据包,如果规定时间内没有收到该数据包,视为连接已断开。
2.2 结构扁平化
2.2.1 简化降级方案,取消点式配置
中国轨道交通信号系统降级方案的提出是在早期CBTC系统刚引入、没有开通经验的情况下,为保证基本开通的临时过渡和防止因CBTC不稳定造成较大影响的情况下产生的。点式降级是在CBTC系统轨旁ATP/ATO计算机故障或车地无线通信故障时的降级模式,在进路始端信号机外方设置有源应答器,列车通过有源应答器时,获取对应信号机防护进路的移动授权信息,指导司机设备控制列车运行。

图3 全自动主副双活中心心跳检测原理
Figure 3 Schematic of automatic dual active center heartbeat detection
由于点式方案在车地通信信息传输上不能形成闭环,对应CBTC同等运行模式下,增加了很多限制条件,为完善功能导致系统接口和设备增加,比如增加站台区的红灯误触发、站台门联动等功能,增加了系统结构复杂度。随着中国CBTC项目开通运行日趋稳定成熟,近年无线专用频点更加提高了车地传输信息抗干扰能力,同时考虑全自动在系统配置上更加关注稳定性和故障下的快速恢复,配置双活中心、边缘检测设备、冗余网络及接口等措施使得系统可靠、可用性进一步提高,并且点式方案无法实现全自动运行功能,如全自动系统故障需要考虑的是如何尽快处理故障恢复运营,因此可取消点式方案,如图4所示,给全自动一个更加纯粹的无人环境运行。
取消点式后,还可以优化轨旁设备,减少区间计轴磁头和有源信标,使得全自动系统结构更加清晰,同时也降低了初期投资和后期运营维护成本。

图4 取消点式控制模式系统变化
Figure 4 System change by cancelling point control
2.2.2 采用全电子联锁,实现故障快速恢复
目前国内大部分在用的联锁系统为计算机联锁,虽然其逻辑部分采用硬件冗余的计算机比较表决方式进行逻辑运算,但是执行部分采用的继电器组合方式由于存在大量的继电器节点,使得在故障下维护检修时间较长。
随着技术发展,传统计算机联锁已经向全电子联锁过渡,这种用电子器件取代由继电器驱动的信号和转辙机等设备的联锁系统,使设备更加小型化和智能化。目前在欧洲轨道交通项目中已经普遍被采用。
全电子联锁采用冗余结构的电子执行单元代替了传统的I/O机柜、接口柜、组合柜,并通过自检、热插拔以及监测报警功能提高系统的可靠性和可维护性,对比如图5所示。

图5 全电子联锁与传统计算机联锁的结构对比图
Figure 5 Structure comparison of fully electronic interlock and traditional computer interlock
全电子联锁和传统计算机联锁在功能、使用与维护、技术性、施工等方面的对比如表2所示。
2.3 设备可靠化
目前在国内全自动运行项目中,障碍物探测主要方式为被动检测,在车辆第一轮对前装设触碰传感器,信号系统增加与车辆障碍物探测设备的接口,接收来自障碍物探测设备的信息,当探测到障碍物时,向车辆制动系统发出紧急制动指令[3]。被动检测为事后防护,造成的危害也与列车当时的速度和障碍物体积、硬度有着直接关系,因此在全自动运行中应该开发主动检测设备——基于AI技术的非接触式远距离主动障碍物检测系统。
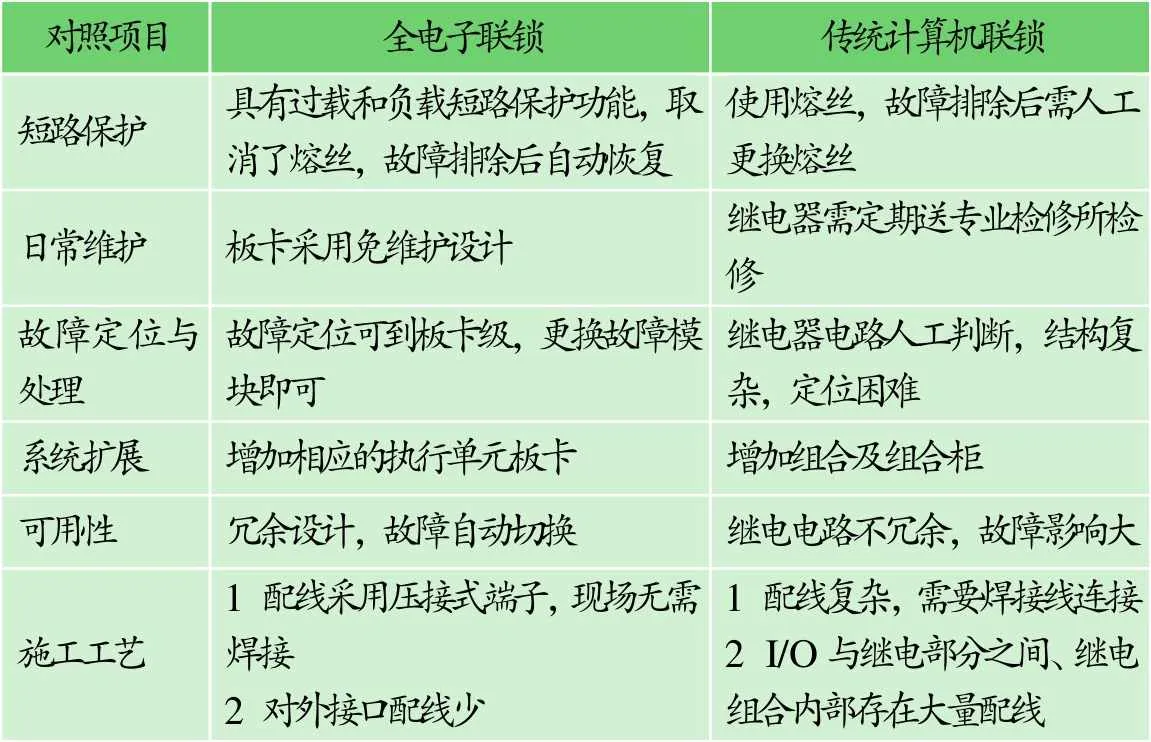
表2 全电子联锁和传统计算机联锁对照
早期主动检测采用雷达和红外技术对轨道前方进行探问,当信号系统故障导致列车自动驾驶(automatic train operation,ATO)与自动防护(automatic train protection,ATP)失效时,为保障正常运营,列车将转为司机人工驾驶,由于地铁隧道里弯道、坡道以及照明不良等环境限制,司机瞭望视野会受到影响,此时需要辅助系统帮助司机进行前方列车距离判断和提示,从而避免人为失误造成追尾、侧冲等运营事故,但始终无法解决误报问题[6]。
随着视频分析、图像动态处理等人工智能(artificial intelligence,AI)技术的发展,已有效结合激光探测、视频场景分析等技术,实现主动识别预警。
基于AI技术的非接触式远距离主动障碍物检测系统,基本结构由车前视频摄像头、雷达、天线、车载主机等组成。系统采用视觉设备感知环境获取数据,通过智能算法实现对前方轨道和限界内障碍物的智能检测,包括与障碍物距离、类别、侵入范围等,并向信号车载设备提供相关预警、告警,辅助防护车辆运行安全,如图6所示。
基于AI技术的非接触式远距离安全防护系统主要具备以下功能:
1) 基于深度学习的识别技术。模仿人脑进行分析学习的神经网络,通过深度学习,利用图像、点云数据不断通过机器训练优化识别效果,做到机器自主选取特征进行学习与识别。

图6 非接触式远距离主动障碍物检测系统原理
Figure 6 Schematic of non-contact remote active obstacle detection system
2) 高性能车载计算技术。搭建定制化平台,配备高性能处理器,合理进行GPU(图形处理器)、CPU功能分配,实现运算的高效性以及高度实时性。
3) 多传感器融合技术。根据不同类型传感器特性定制开发的多传感器融合识别算法,对全线样本采集、训练及建模,对障碍物进行有效识别,并输出距离、限速等信息,提升行车安全性。有效弥补单一传感器在特定环境中采集数据不准确的缺陷。
2.4 响应快速化
全自动运行中控制中心功能增强,列车为适应无人值守的运营规则,系统需增加远程功能,包括远程开关门、远程制动及缓解、远程升降弓、远程休眠与唤醒、远程换端、远程清客等,除了这些常规运行状态下所需的远程功能外,为了解决全自动运行降低对运营的影响,远程限制人工驾驶模式(remote restricted manual driving mode,RRM)就显得尤为重要了。
在传统轨道交通中,限制人工驾驶模式用于列车在无ATP地面速度信息的地点(如车辆段)及正线ATP地面设备故障或无线故障时的超速防护,由司机人工驾驶列车,一旦运行速度超过规定设备规定速度,车载ATP将实施停车。
RRM模式可实现区间列车的自动恢复而无需安排工作人员登车处理,与传统限制人工驾驶模式最大的区别就是列车丢失定位或车载故障重启后,由中心调度代替司机控制列车按限速在系统预定义运行移动距离内行驶,列车到达指定区域后可恢复升级至自动模式,或列车由机动工作人员接管。除此之外,还可适用于对不能移动的故障列车进行远程连挂救援的工况。随着无线技术的发展,信息传输越来越稳定,为RRM驾驶的命令及视频监测手段提供了可靠保障。
3 结语
全自动运行技术在国内尚处于初级阶段,可借鉴的工程经验较少,本文针对全自动运行系统的特点和国内工程方案,分析了适合全自动系统的优化方向,并将个别功能优化应用于新建工程中(如哈萨克斯坦阿斯塔纳首条轻轨、我国绍兴地铁2号线等)。
全自动运行为轨道交通带来了自动化技术和运营服务水平的提高,但在用先进技术实现各项功能的同时,也不能一味地堆积叠加,而应该以全自动行车为主线,优化控制程序,使系统架构更加清晰,制定更加适合全自动运行的方案。在中国未来的城轨交通中,全自动无人驾驶技术的应用将成为发展方向。
[1] 李春宇. GOA2与GOA4信号系统技术要求对比分析[J]. 铁路通信信号工程技术, 2019, 16(7): 61-64. LI Chunyu. Contrastive analysis of technological requirements of GOA2 and GOA4 signal systems[J]. Railway signalling & communication engineering, 2019, 16(7): 61-64.
[2] 朱沪生. 全自动列车运行系统在上海城市轨道交通工程中的应用[J]. 城市轨道交通研究, 2006, 9(4): 1-3. ZHU Husheng. Application of fully-automated operation system in Shanghai urban rail transit[J]. Urban mass transit, 2006, 9(4): 1-3.
[3] 梁九彪. 地铁无人驾驶工程的匹配设计[J]. 城市轨道交通研究, 2014, 17(2): 4-7. LIANG Jiubiao. On unmanned metro engineering requirements for matching design[J]. Urban mass transit, 2014, 17(2): 4-7.
[4] 顾伟华, 汪小勇, 艾文伟, 等. 轨道交通无人驾驶信号系统关键功能分析[J]. 地下工程与隧道, 2015(2): 1-3. GU Weihua, WANG Xiaoyong, AI Wenwei, et al. Analysis of key functions of signal system for rail transit driverless operation[J]. Underground engineering and tunnels, 2015(2):1-3.
[5] 金华. 城市轨道交通全自动无人驾驶信号系统功能分析[J]. 铁路计算机应用, 2014 , 23(1): 61-64. JIN Hua. Analysis for function of full automatic unmanned signal system of urban transit[J]. Railway computer application, 2014, 23(1): 61-64.
[6] 宋丹, 刘登. 基于二次雷达技术的地铁防撞预警系统研究[J]. 铁路通信信号工程技术, 2019, 16(4): 53-57.SONG Dan, LIU Deng. Collision warning system for urban rail transit based on secondary surveillance radar[J]. Railway signalling & communication engineering, 2019, 16(4): 53-57.
Engineering Optimization Scheme for Design of Fully Automatic Operation Signal System
GONG Jian
(Beijing Urban Construction Design & Development Group Co., Limited, Beijing 100045)
According to the grade of automation, the fully automatic operation (FAO) system of an urban rail transit can be divided into driverless train operation (GoA3) and unattended train operation (GoA4). FAO is a typical functional requirement about “center intensive control, and fast recovery of faults.”The signal system is the core of FAO. In view of the above- mentioned facts, this paper expounds on the importance of the system architecture and function of the optimized design scheme when thesignal system transitions from level GoA2 to level GoA4. Beginning from the event of a center controlling train directly, this paper focuses on a center centralized control, equipment safety and reliability, and a fast recovery of faults. Optimization suggestions that provide a reference direction for improving the reliability and stability of FAO systems are raised with intelligent detection equipment that adopts a dual active center, fully electronic interlock, integrated radar, and video analysis technology.
rail transit; full automatic operation system; signal system; dual active center; fully electronic interlock; non-contact; obstacle detection system
U231
A
1672-6073(2021)02-0137-05
10.3969/j.issn.1672-6073.2021.02.022
2019-11-29
2019-12-24
弓剑,男,硕士,高级工程师,从事轨道交通信号系统设计工作,gongjianbs@sina.com
弓剑. 全自动运行信号系统设计的工程优化方案研究[J]. 都市快轨交通,2021,34(2):137-141.
GONG Jian. Engineering optimization scheme for design of fully automatic operation signal system[J]. Urban rapid rail transit, 2021, 34(2): 137-141.
(编辑:王艳菊)