植保无人机技术原理及其在作业中的优缺点分析
2021-06-16
(额敏县喇嘛昭乡农机管理服务站,新疆 额敏 834615)
0 引言
在现代化的农业生产过程中,很多传统农艺步骤的实施方式呈现多样化特点,植保无人机在农业生产中的应用就是农业生产方式变革的典型代表。利用化学药剂进行病虫害防治是现代农业生产的主要技术手段,一直以来农药喷施机械的研究与应用都是农业机械研究的重点内容,近年来随着无人机技术的快速发展,植保无人机在我国农业植保中的应用逐渐增多。植保无人机以其作业的便捷性和植保的高效性受到了越来越多农民的青睐,且相对于传统的农业植保方式,植保无人机的自动化和功能优势也十分明显,因此植保无人机在农业生产中的应用具有重要研究价值。
1 植保无人机技术发展情况
现阶段,我国农业植保作业总体上看技术实力还比较落后,大多数地区的植保方式仍以手动喷雾器与拖拉机配套背负式机动喷雾器作业为主,半自动化的人力作业模式仍占据着较大比例,拖拉机配套大型喷雾设备的作业比例仍显不足[1]。尤其是在高秆作物生长的中后期,往往存在着植保机械作业难度大的问题,通常只能采用人工喷施进行植保作业,相对而言人力植保存在着危害健康、农药喷施不均匀、覆盖不全面等问题。植保无人机在我国农业机械市场上的兴起约在2014年左右,主要以多旋翼植保无人机为主,现阶段的植保无人机作业发展速度较快,很多先进的植保无人机设备纷纷应用到农业生产中,例如,大疆T系列植保无人机和极飞P系列植保无人机在农用无人机市场上占据着较大的比例。但总体来看,农业生产对无人机植保作业的认识还不充分,无人机在农业植保作业方面的推广与普及还有很多的工作要做。
2 植保无人机的结构与原理
2.1 植保无人机的基本结构
农用植保无人机的基本结构主要包括了飞行系统、控制系统、电源系统、喷药系统、监测系统等几大部分(图1)。其主要工作部件包括无刷电机与桨叶、高雾化喷头、输药管路、药液泵、GPS终端、飞控系统等。现代化的植保无人机在作业时能够利用高雾化喷头实现高精度农药喷施作业,并利用GPS和视觉系统的共同作用实现自动化农药喷施作业。

1.桨叶;2.桨叶支臂;3.无刷电机;4.飞控系统;5.药液箱;6.电池;7.药液泵;8.输药管路;9.喷药杆图1 植保无人机的基本结构
2.2 植保无人机的工作原理
2.2.1 无人机的飞行控制原理
农用植保无人机多采用4旋翼、6旋翼、8旋翼等布局,分别能够实现升降、翻滚、俯仰、偏航等动作功能。以4旋翼植保无人机的结构为例,说明无人机飞行动作的控制原理。
(1)无人机的升降动作需要四个电机同时调整转速,以调整垂直升力的大小,当垂直升力大于无人机重力时,植保无人机则实现上升动作,当垂直升力小于植保无人机重力时,则实现下降动作(图2a)。(2)当植保无人机前后两侧的电机转速进行调整,而左右两侧电机转速维持不变时,若前方电机转速增加,后方电机转速降低,则实现上仰动作,反之实现下俯动作(图2b)。(3)与仰俯动作类似,当前后方向电机转速不变,左右两侧电机呈现速度增减时,则实现无人机的翻滚动作(图2c)。(4)当植保无人机进行偏航运动时,两对角线上相同转向的电机转速同时进行调整,使前后或左右方向同一对角线的电机产生反转,无人机受到飞行过程的反扭力使机身重心沿顺或逆时针转动,实现偏航运动(图2d)。
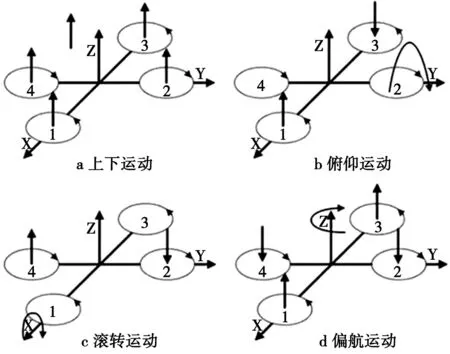
图2 植保无人机飞行控制原理
2.2.2 植保喷施工作原理
无人机的药物喷施工作主要依靠GPS技术与喷洒系统配合完成,通过GPS定位实现飞行速度的合理控制,再辅以科学的农药喷施量,则能达到最佳的药物喷施效果。在进行植保作业时,无人机在距田间一定距离的平坦位置起飞,到达预定工作的起点位置后开启喷洒系统,并按照预设轨迹飞行,执行农药喷洒工作。正常情况下,无人机呈匀速直线飞行,并均有合理的飞行行间距,当遇到障碍物或信号干扰时,无人机实施自动避障或停喷悬停预警,待异常状态解除后无人机可实现断点续喷功能[3]。当作业过程遇到农药不足或电量不足时,无人机执行自动返航功能,并在更换电池或补充药液后飞回原位置,执行断点续喷作业。
3 植保无人机作业的优缺点分析
3.1 植保无人机的主要优势
3.1.1 作业效率高,喷施均匀性好
植保无人机作业灵活机动,不受地形和作物生长状态的影响,能够实现全地形、全作物种类的高效率作业,作业过程中对环境的适应性好,能实现贴地飞行或指定高度的飞行植保作业,由于植保无人机采用了高雾化喷头和高浓度药液,喷施均匀度更高,农药可利用桨叶旋转的风力进入作物下部或根部,进一步提高药物作用范围[3]。
3.1.2 作业安全性高,环境污染小
植保无人机的作业只需要操作人员在远处操作无人机飞行,飞手距离实际植保喷雾位置较远,对自身的健康危害较少。同时,高精度的喷施使农药的使用量更为精准,农药的过量喷施问题得到改善,减少了农药喷施对农业生产环境造成的危害。
3.2 植保无人机作业的不足之处
3.2.1 作业能力仍待提升
一方面,现阶段的植保无人机作业因为需要携带大量农药,因此高负重情况下无人机的飞行时间相对较短,作业过程需要频繁更换电池,影响了实际作业效率;另一方面国产植保无人机在喷头技术的应用上仍处于落后局面,植保无人机的喷施雾化效果仍有待提升。
3.2.2 购置成本较高,操作难度相对较大
由于大多数的农用植保无人机没有获得农机购置补贴的资金支持,因此现阶段农民购置植保无人机存在一定的经济压力,同时植保无人机要求具有一定的遥控飞行技能,导致农民很难快速实现对植保无人机的应用。
(05)
