堤坝无人机快速巡检系统软件设计与实现
2021-06-16张佳琪徐磊于彦飞高原
张佳琪 徐磊 于彦飞 高原
(1.长江勘测规划设计研究有限责任公司 湖北省武汉市 430010 2.山东大学控制科学与工程学院 山东省济南市 250061)
1 引言
对于堤坝病害检测,最早且最常用的方法是依靠人工观测,但该方法费时费力,且较容易受到人为主观因素的影响,导致大规模堤坝快速检测无法实现。因此,为了实现大规模堤坝病害的快速检测,需要采用新型的技术,无人机快速巡检系统的出现为堤坝表观病害检测提供了良好的发展思路。无人机作为一种新兴的数据采集方法,可以通过搭载多种型号的传感器来满足不同类型的病害检测要求,能够轻松获取测量人员难以采集的数据信息,并且可以向地面传输拍摄的图像信息,与先进的数字图像处理算法相结合,从而实现病害信息的高效准确的定位与识别。
随着科技的进步与发展,越来越多无人机可搭载的高精度设备出现在我们眼前,无人机巡检已经开始成为堤坝病害检测领域的主角,但在数据采集方面,还存在未实现完全自动化的问题,在病害识别方面,由于无人机数据噪声大、干扰严重,所以病害的识别精度较低,完备的无人机检测系统与高精度病害识别方法还没有出现。因此,适应于堤坝病害快速检测的无人机巡检系统急需研究。
本文搭建了一套基于无人机巡检的快速巡检系统的软硬件平台,开发了一套基于无人机巡检的快速巡检系统的软件系统,最后通过现场试验进行验证,实现了基于无人机的堤坝破损和渗漏的快速巡检。
2 堤坝无人机快速巡检系统硬件平台设计
堤坝无人机快速巡检系统需要检测堤坝表观破损的位置以及尺寸与渗漏的位置以及面积,要求能够进行多种情况的数据采集;区分最小1mm 的裂缝以及温差为0.1℃的温度变化;对无人机的位置信息以及红外热成像图的温度数据进行存储;搭载多个云台相机并且具有较好的续航能力。
根据堤坝无人机快速巡检系统的检测要求,该系统的无人机采用大疆经纬M210 V2,此无人机容易操控、机动灵活,具有较长的续航时间,能够搭载多种云台相机,并且具有防水效果,面对雨雪等极端天气依然能够运行,满足实际工程的需要。
可见光相机本系统选用禅思Z30 云台相机,该相机的光学变焦和数码变焦分别为30 倍和6 倍,能够清晰观测到堤坝表面的毫米级裂缝,同时该相机配备了三轴增稳技术,能够在飞行过程中控制相机抖动,可以达到0.01°。
红外相机采用禅思ZENMSE XT 2 热成像云台相机,该相机具有多种伪彩和数据保存模式,并且能够高精度的获得待检测区域的温度信息,满足实际检测的需要。
3 堤坝无人机快速巡检系统软件设计
无人机快速巡检系统的软件是在Windows 系统下利用MATLAB 进行开发的,能够进行堤坝破损和渗漏的识别,易于操作,软件总体架构主要包括堤坝表观裂缝检测与堤坝渗漏检测两大模块,各模块独立封装,具有较高的稳定性和可靠性,可以对大量的数据进行检测,其检测结果能够保持稳定。
在对采集的堤坝数据进行检测之前,需要对堤坝无人机快速巡检系统软件的参数进行配置,确保软件能够实现相应的功能。对于堤坝表观裂缝检测,主要包括单幅图像检测与全部图像检测,全部图像即为无人机检测的全部数据。单幅图像检测可以对图像的滤波参数以及Frangi 参数进行调节,滤波参数包括滤波半径与正则化参数,Frangi 参数包括图像增强系数、噪声抑制系数与修正系数;全部检测图像的参数调整是在单幅图像检测的基础上进行的,即需要对增加的裂缝病害识别的支持向量机(SVM)分类参数进行调节,SVM 分类器的参数包括分类器训练与预测参数两种,训练参数又包括特征维数以及训练数据的设置;预测参数包括特征维数以及分类模型设置。对于堤坝红外渗漏检测,需要对图像预处理以及渗漏识别的一些参数进行配置,预处理参数包括滤波半径和3 种形态学结构元素的设置;渗漏识别参数为初始迭代温度的设置。参数配置模块中的参数如果不进行设置,堤坝无人机快速巡检系统软件就会按照系统默认的参数对堤坝数据进行检测。
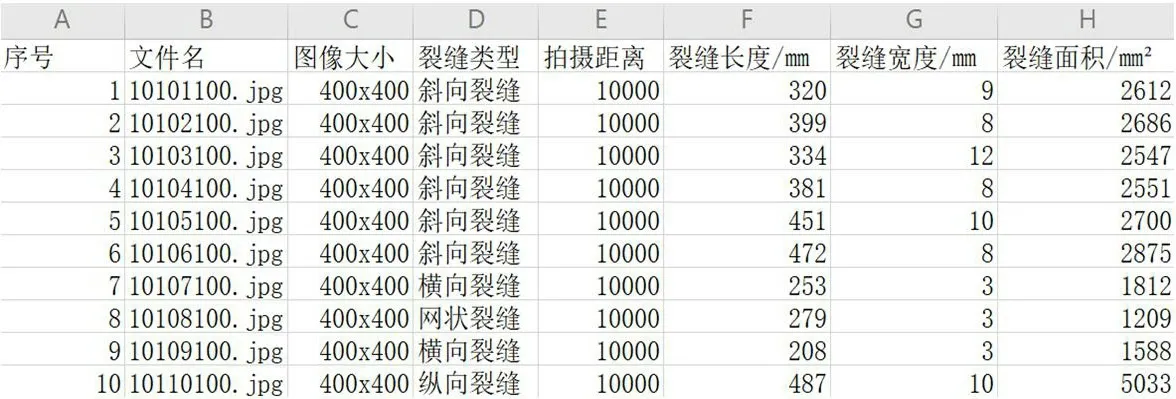
图1:裂缝检测结果

图2:渗漏检测结果界面
堤坝表观裂缝检测和渗漏检测模块的主要功能分别是对堤坝进行裂缝识别以及渗漏检测,软件界面主要包括显示区域、控制面板、裂缝或者渗漏信息、参数信息和操作记录等五部分。裂缝检测模块包括单张图像以及全部图像数据的裂缝检测,单张图像检测可以直接在裂缝检测界面中显示出裂缝提取图像、图像的名称和尺寸以及识别出裂缝的类型、长度、宽度以及面积等信息;全部图像检测首先对图像数据中是否存在病害进行分类,然后在进行病害信息的提取,但是由于数据量过大,其检测数据无法在软件界面中显示,检测结果被保存到Excel 表格中。渗漏检测模块既可实现单张红外热成像图的检测,又可实现全景图像的渗漏检测,在进行全景图像检测之前,可以通过软件界面中的图像拼接操作对红外热成像图进行全景拼接,然后对全景图像进行识别,最后将检测结果保存至Excel 表格中。堤坝无人机快速巡检系统软件实现了堤坝病害缺陷的检测以及检测结果的存储和查询。
4 堤坝无人机快速巡检系统测试
为了对堤坝无人机快速巡检系统的可行性进行测试,本文对该系统进行了现场试验。测试采用的软件系统运行于64 位Windows10 操作系统上。硬件平台选用了大疆经纬M210 V2 无人机,并搭载了禅思Z30 云台相机和禅思ZENMSE XT 2 热成像云台相机。本文通过调整拍摄角度、预设无人机飞行路径的方式来获取高质量的堤坝表面图像数据。无人机在拍摄图像数据时,需要保持其机载云台相机镜头与堤坝的表面呈垂直的状态,由于堤坝坡面是倾斜的,所以在检测之前需要适当调整相机与坡面的拍摄角度。并使用无人机路径规划功能来自动采集堤坝表面图像数据,根据堤坝的图纸和采集图像的面积对堤坝进行等区域划分并得出每个区域的中心坐标,然后将这些坐标传输到无人机中进行路径规划,以使其在该点进行拍摄,最后按照图像数据的位置对其进行命名。
4.1 堤坝表观破损检测系统测试
场地选取为山东省乐陵市碧霞湖,该湖的堤坝上存在较多的横向裂缝,为了获取较多的不同方向的裂缝,使用无人机对该处场地进行了多角度的拍摄,测试飞行高度为10m,共采集图像数据250张,经过筛选,剩余了高质量图像200 张,包括裂缝图像和无裂缝图像各100 张,其尺寸为400×400。
将无人机采集到的图像数据导入检测系统,进行裂缝的识别。对于真实的堤坝裂缝数据,本系统识别的召回率和精确率都高于90%,错误识别的图像和丢失的病害图像较少,通过对图像检测结果进行分析可知,错误的信息主要是由于树木和石块的干扰导致的,丢失的病害图像可能是由于采集图像的对比度较差。因此,该检测系统可以实现堤坝裂缝病害的准确识别。在识别完成之后,需要对软件系统进行进一步的操作来实现裂缝信息的提取以及保存,检测结果被保存在Excel 表格中,如图1 所示。
4.2 堤坝渗漏检测系统测试
渗漏检测系统的测试场地为无遮挡的河堤,测试过程中的环境温度、水温以及空气湿度分别为17.2℃、15.1℃和54%,红外图像尺寸为2456×154,采用可见光图像和拼接后的红外图像进行渗漏识别。
首先向堤坝渗漏检测软件系统输入堤坝原始红外图像,接下来需要进行检测参数的设置,参数设置完成之后,渗漏检测算法即可进行图像的检测,提取渗漏区域,最后该系统会将检测结果以及渗漏区域参数信息显示在软件界面上并进行保存。如图2 所示。
渗漏识别结束后对本文算法进行量化分析,与人工分割进行比较,区域交并比(IOU)保持在90%以上,错配率保持在1%以下,对于较大视场的图像识别时间仅为0.921s。因此本文算法能够对堤坝渗漏进行快速有效的识别。
5 总结
本文设计了一套堤坝无人机快速巡检系统。基于无人机系统以及软件平台实现了堤坝病害数据的自动采集以及检测,并通过堤坝现场试验对堤坝无人机快速巡检系统进行了验证与分析,所设计的堤坝无人机快速巡检系统能够快速准确的识别堤坝裂缝以及渗漏病害。
