目标临时位置估计的无线网络残差幂次方加权定位算法
2021-06-16赵梦龙
赵梦龙
(贵州职业技术学院 贵州省贵阳市 550023)
目前学术界为了可以对非视距环境中目标定位精度有所提升,现有研究中提出可以抑制定位误差的几种算法,主要包括了以下几类,分别为模型法、检测法、应用SN 信息优化算法定位方法[1]。因为第一种所受实际环境动态化、复杂性影响定位模型精度,检测法利用LOS-SN(视距传输静态节点),提出NLOS-SN 的位置估计,对于LOS-SN 节点数条件要求较高。应用SN 信息优化算法定位方法,可以运用LOS 节点和NLOS 节点优化算法,虽然定位精度较高,但是这种算法的计算复杂度也较高[2-5]。所以本文基于传统权重算法优化改进,提出基于目标临时位置估计的无线网络残差幂次方加权定位算法,证实本文提出方法的定位精度相较传统算法明显提高。
1 目标临时定位残差
见图1,根据测量所得SN1静态节点角的到达角,与两个定位圆相交,SN1至TN的测距为圆的半径,如图1所示相交A点,作为TN 的目标临时估计位置。类似就可以运用SN2测量所获到达角,与两个静态节点之间测距,获得另外TN 目标临时估计位置。除此之外还可以将两个定位圆在C 交点,视为第3 个TN 目标临时估计位置[6]。
2 临时定位残差加权算法
假设在目标临时定位共计N 个静态节点,参照以往文献可以轻易获得基于临时定位残差的加权定位算法,可以完成静态节点的分组处理,之后以测距和测角相关信息为依据,每组2 个静态节点,所获C2N 个静态节点组。针对每一个静态节点组来讲,假若较小的临时定位残差值,那么表示该静态节点组作为LOS,反之即NLOS。通过以临时定位残差值的数值为依据,用于分配每一个目标临时位置的相应权重,从而有效抑制NLOS 误差提升了目标临时位置的定位精度。所获每组TN 临时位置及对应权重值,最终确定TN 目标临时位置,公式如下:

图1:定位几何模型图

图2:算法流程图
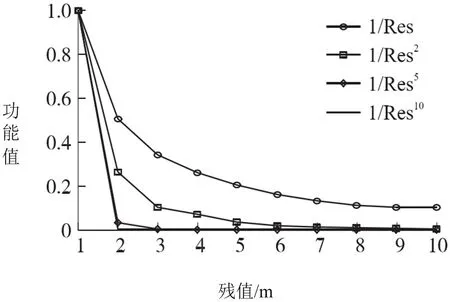
图3:不同加权函数数值变化
图2 作为本次算法的流程图。
3 仿真分析
3.1 确定加权函数
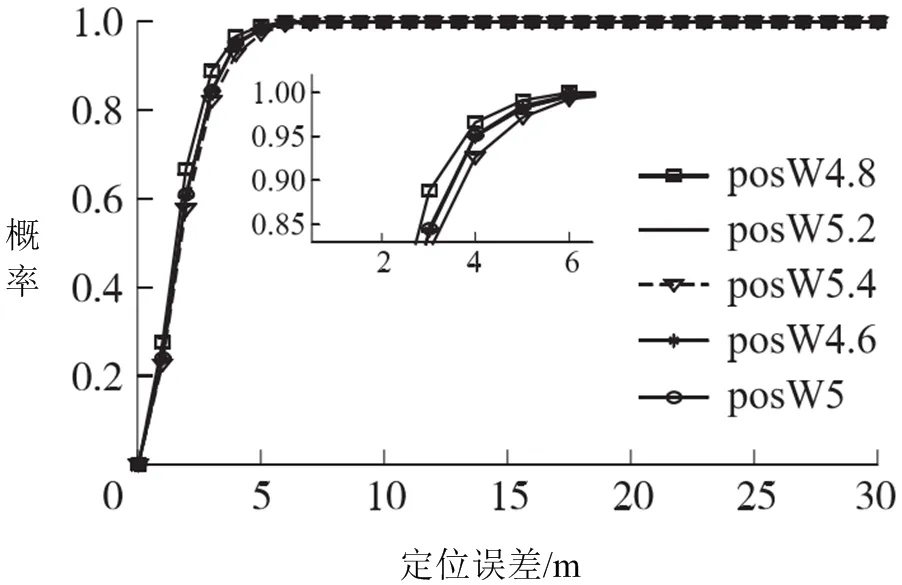
图4:不同幂指数CDF 图
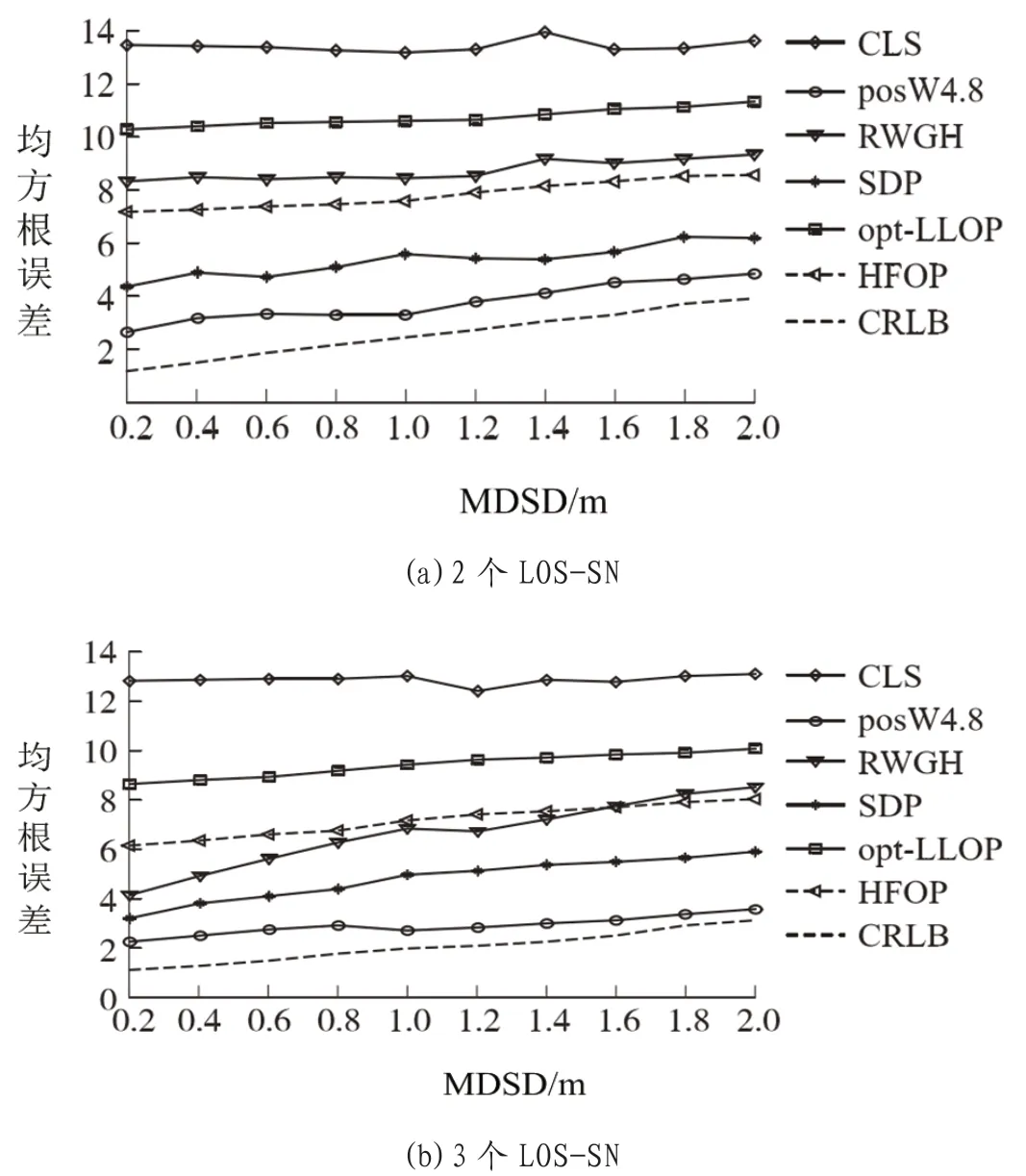
图5:MDSD 对算法精度影响
假设MDSD(测距标准差值)为1m,MASD(测角标准差值)为1°,MLOSmax(最大值)为40m。(见图3)作为不同权重函数数值改变,对比1、2、5 次方加权函数曲线,能够发现明显提升了残差幂次方相应数值定位精度,所以本次仿真选定5 次方加权作为标准进行幂次方小数搜索。(见图4)作为不同幂指数CDF 图,发现在约为5 情况下不存在显著差异,根据仿真结果最终选定了4.8为最优值。
3.2 不同算法相较
在MDSD、MASD、NLOS 三个误差对不同算法定位精准度造成影响的研究中,设定2 个LOS 静态节点和3 个LOS 静态节点运行环境,NLOS 误差均匀分布于0 至最大值之间。分别对残差权重算法(RWGH)、约束最小二称算法(CLS)、凸半定规划算法(SDP)、线性最优化算法(opt-LIOP)、海伦公式最优化算法(HFOP)、本文提出算法(posW4.8)、克拉美罗下界(CRLB)。
3.2.1 MDSD 误差影响
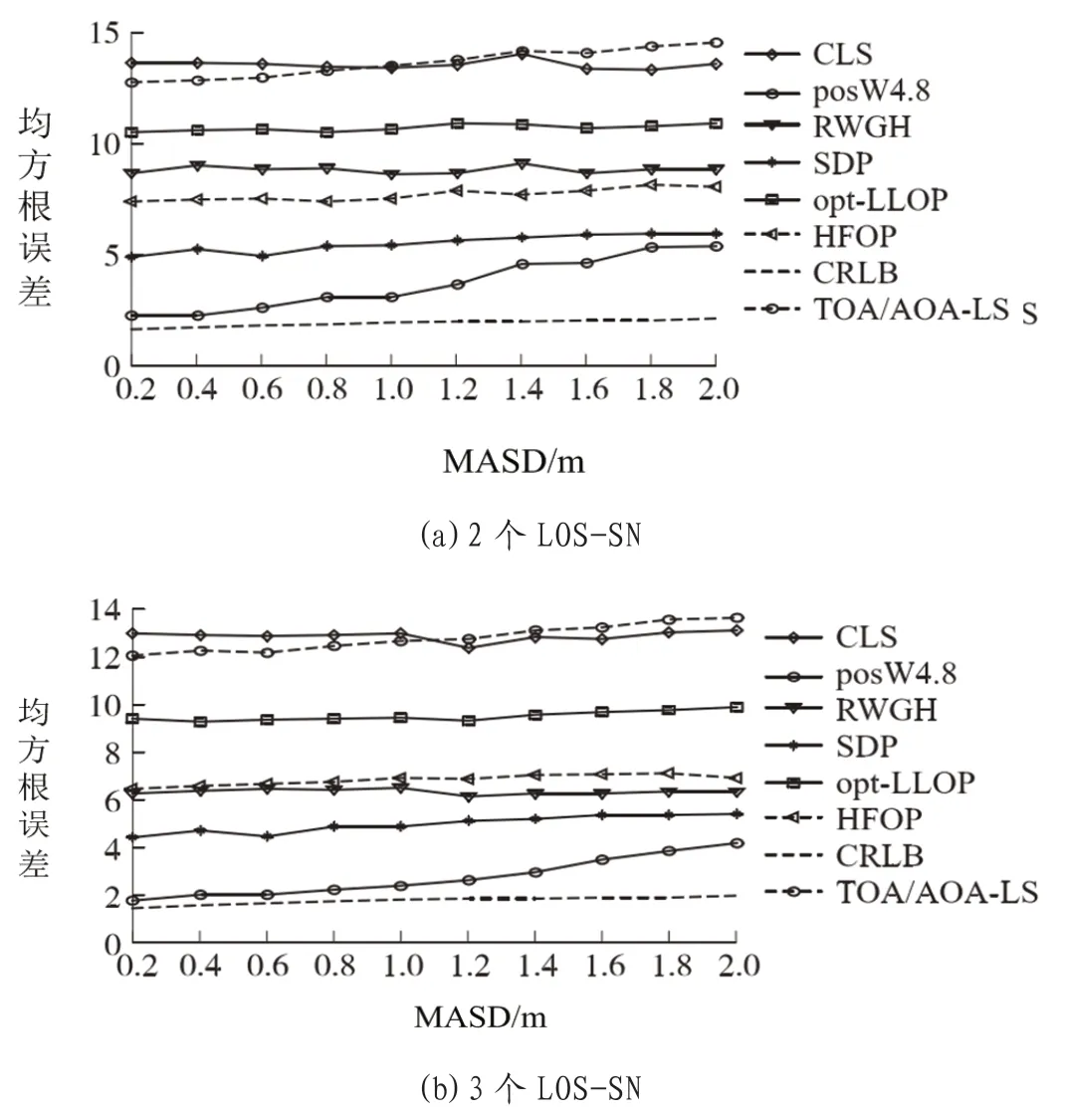
图6:MASD 对算法精度影响

图7:NLOS 误差最大值max 对各算法定位精度影响
在MDSD 误差影响仿真结果(见图5)发现,CLS、opt-LIOP、RWG 和HFOP 运用以上4 种算法会产生较大的目标临时位置估计误差,相比之下,SDP 定位性能较以上四类算法明显改进,尤其对于仅有2 个LOS-SN 条件下,但是相比之下仍然与本文提出算法有一定差距。虽然随着逐渐增加的MDSD 仿真条件,此种算法定位误差逐渐上升,但是相较其他算法略低。出现此种情况原因在于逐渐增加MDSD 在LOS-SN 所获目标临时估计位置相应权重值相应降低,所以降低了定位性能。根据这一仿真结果可以发现,随着逐渐增加LOS-SN 数量,本文提出算法posW4.8 与CRLB 算法的曲线接近,所以证实了本文提出算法LOS-SN 数量随之增加获得更好的目标定位性能。
3.2.2 MASD 误差影响
在MASD 误差影响仿真结果(见图6)发现,随着逐渐增加的MASD 值,在TOA/AOA-LS 除外的算法,其他算法的曲线对比基本持平,这一现象在于算法定位不存在利用角度信息。并且根据对比发现本文提出算法较TOA/AOA-LS 算法,随着逐渐增加的横坐标随之上升,因为逐渐增加的测角误差,降低了分配给精度较高临时位置的预估权值,所以也就相应降低了定位精度。本文提出算法较TOA/AOA-LS 算法的定位精度明显更高,并且本文提出算法还拥有始终保持性能的显著优势。
3.2.3 不同max 值的NLOS 误差影响
在不同max 值的NLOS 误差影响仿真结果(见图7)发现,测距的NLOS 误差最大值表示纵坐标,定位均方根误差表示纵坐标,对比下图各曲线可以发现,RWGH、CLS、opt-LIOP、HFOP 以上四种算法,在逐渐增加的max 值情况下均呈现明显的上升趋势。观察SDP 算法的误差影响曲线,发现在Max 值不断增加情况下,曲线并未达到上文所提这4 种算法的明显上升。但是较本文提出算法明显要高。根据图示曲线情况,可以发现本文提出该算法的定位精度,较NLOS 误差的逐渐增加,仅仅存在略微起伏,整体曲线变动比较平缓,所以表示了尽管在不同max 值的NLOS 误差影响下,本文提出算法依然可以达到较高定位精度。
4 结语
为了对非视距环境中定位精度有效提升,本文提出了基于目标临时位置估计的无线网络残差加权定位算法,在仿真相较其他算法,对于MDSD、MASD、NLOS 三个误差对不同算法定位精准度造成影响仿真条件下,发现在LOS-SN 低于2 时,本文提出无线定位方法的精度较传统非视距定位误差远远较小,提高了60%的定位精度,并且降低了对LOS-SN 的个数要求。
