基于加权伪逆法的倾转旋翼机冗余操纵分配研究
2021-06-16苏小恒
苏小恒
(中国直升机设计研究所飞行控制部,江西景德镇,333001)
倾转旋翼机既具有直升机的垂直起降和悬停能力,又具有螺旋桨飞机的高速巡航能力[1],其独特的结构设计带来了优异的性能,同时也带来了复杂的气动、动力学和控制等问题。倾转旋翼机具有两套操纵机构,直升机模式时主要由旋翼提供操纵力矩,固定翼模式时主要由舵面提供操纵力矩,过渡过程中由两套操纵机构同时提供操纵力矩,因此倾转旋翼机在过渡过程中存在操纵冗余,解决操纵冗余问题成为控制系统设计的前提。
控制分配技术是在考虑飞行器操纵机构约束的条件下,将控制指令以最优目标分配到各个操纵机构,以确保飞行器的稳定性和操纵性。该技术是解决操纵冗余问题的有效方法,已被广泛应用于航空航天领域[2]。
不同于先进固定翼飞机的实时控制分配,目前倾转旋翼机操纵分配是通过预先设定基于速度和短舱角度的分配方案以解决操纵冗余问题。XV-15基于短舱角度使用余弦函数确定操纵分配[3],严旭飞等[4]和马存旺等[5]基于短舱角度使用正弦函数确定操纵分配,陈永等[6]和夏青元等[7]采用速度的分段函数确定操纵分配,蔡系海等[8]采用短舱角度的三次分段函数确定操纵分配,以上均未采用优化算法。Tom Berger[9]采用加权伪逆法得到优化的操纵分配方案;Christina Ivler[10]等采用伪逆法等多种优化方法确定操纵分配方案。
伪逆法能有效降低控制量最大值,可获得解析解,具有良好的应用价值,同时通过加权矩阵反应操纵机构特性,可弥补伪逆法对约束处理的不足。本文针对倾转旋翼机过渡过程中的操纵冗余问题,基于飞行品质规范的操纵功效要求,综合考虑操纵机构的运动和气动特性,采用加权伪逆法确定最优操纵分配方案,并通过非线性飞行力学模型的过渡仿真对操纵分配方案的有效性进行验证。
1 控制分配方法
飞行器的线性控制分配在数学上可描述为:假设期望的控制力矩产生的角加速度为控制变量为 Δu∈Rm,线性控制分配问题就是在给定ω˙及映射的情况下,求解不定方程B·Δu=ω˙,使得控制变量Δu在不超出约束条件Ω的情况下,满足一定的优化目标。
控制分配中常见的优化目标有:操纵机构总行程最小、阻力最小、升力最大和载荷最小等,可表示为行程的线性或二次叠加[11]。
■1.1 伪逆法
伪逆法是以控制变量Δu的二次范数为优化目标,即

■1.2 加权伪逆法
由于操纵机构约束条件不同,因此不同操纵机构在优化目标中应占有不同的权重。加权伪逆法就是利用加权矩阵对伪逆法进行改进,使其能够间接考虑操纵机构运动和气动特性,优化目标变为其中,W表示操纵机构加权矩阵,为对角正定矩阵,加权伪逆法的解析解为:

当加权矩阵中某元素增大,控制分配后其对应操纵机构行程减小。
2 倾转旋翼机飞行力学模型
■2.1 非线性模型
倾转旋翼机是一个复杂的多体系统,建模部件包括旋翼、机翼-短舱、机身、平尾、垂尾及控制系统。本文基于XV-15的基本参数、气动数据和气动干扰数据建立了倾转旋翼机全飞行模式的非线性飞行力学模型[3][12]。
控制系统模型包括4个操纵输入通道:总距通道ucol、纵向通道ulon、横向通道ulat和航向通道urud。操纵机构包括:副翼δail、升降舵δele、方向舵δrud、纵向周期变距δlon、纵向周期变距差动δlonc、总距δcol、总距差动δcolc。操纵分配系数矩阵为K,则:

■2.2 线性模型
加权伪逆法确定操纵分配是基于线性飞行力学模型进行的。根据小扰动假设,在非线性飞行力学模型各平衡点线化分析得到倾转旋翼机小扰动线化状态方程:

其中,A为状态矩阵,由气动力和力矩产生的加速度和角加速度增量对状态变量增量的偏导数组成,能够反映倾转旋翼机的稳定性,B为控制矩阵,由操纵力和力矩产生的加速度和角加速度增量对控制变量增量的偏导数组成,能够反映操纵机构的操纵功效,Δx、Δu分别为状态变量和控制变量的增量。
3 倾转旋翼机操纵分配
■3.1 控制矩阵分析
根据XV-15的过渡走廊[13],以文献[3]中操纵分配方案为基础计算过渡走廊内的线化状态空间模型,各状态点分布和过渡走廊如图1所示。

图1 XV-15线化模型状态点分布和过渡走廊
当控制变量增量为1°时,各状态点控制矩阵B中的元素表示对应操纵机构操纵1°时产生的加速度和角加速度。分析B中元素可知:对俯仰操纵功效贡献较大的操纵机构为纵向周期变距、升降舵和总距;对横向操纵功效贡献较大的操纵机构为总距差动、副翼和纵向周期变距差动;对航向操纵功效贡献较大的操纵机构为纵向周期变距差动、方向舵和总距差动。图2为各操纵机构操纵1°时倾转旋翼机产生的滚转角加速度随速度和短舱角度的变化曲线。
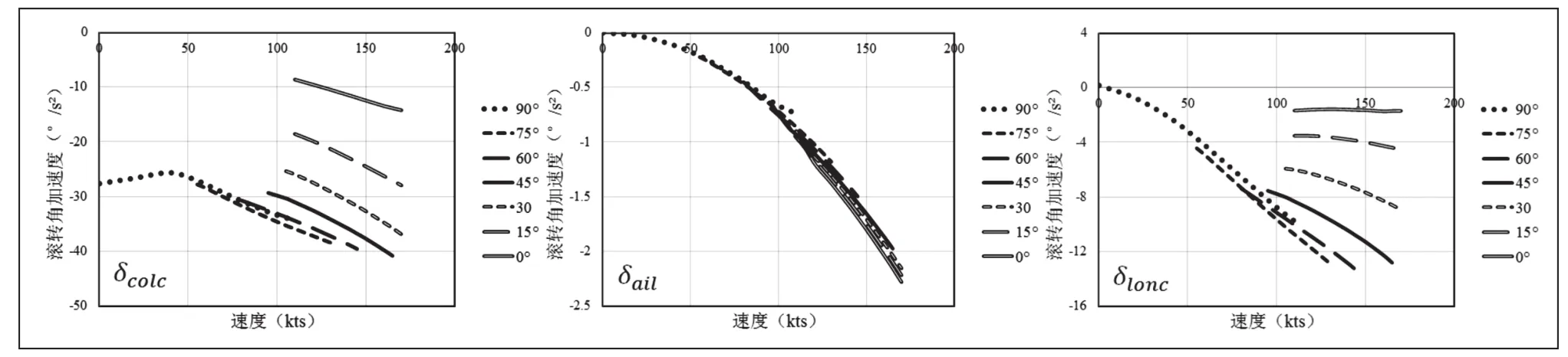
图2 操纵机构对滚转通道的操纵功效
■3.2 操纵分配策略
根据上一节对俯仰、滚转和偏航操纵功效随速度和短舱角度变化情况分析,确定操纵分配策略,即选择操纵功效贡献较大的操纵机构,未被选择的操纵机构对应的操纵分配系数为零。倾转过渡过程中各通道操纵分配策略如表1所示。
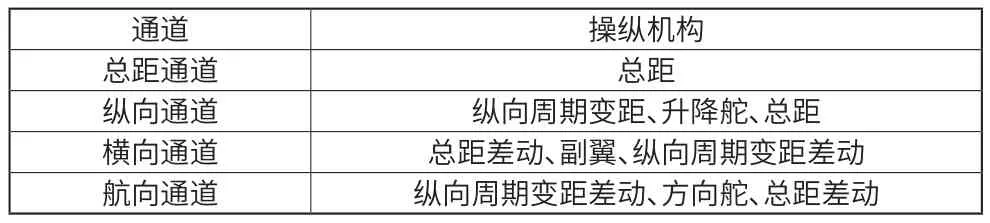
表1 各操纵通道的操纵分配策略
■3.3 期望的操纵功效
期望的控制力矩产生的角加速度xω˙由式(6)确定,即:
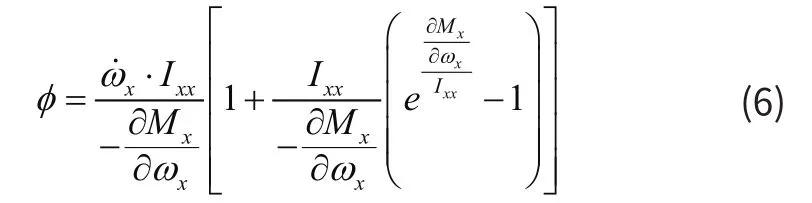
其中φ为飞行品质规范要求的单位操纵输入后1秒末的滚转角响应,I为转动惯量,∂M/∂ω为角速度阻尼导数,∂M/ ∂ω/I可由飞行品质规范对滚转动态响应要求确定。使用相同方法确定。
■3.4 权重矩阵
权值对操纵分配有很大的影响,而影响操纵机构权值大小的因素包括:行程限制、速率限制、带宽限制、操纵功效、响应滞后等。综合考虑操纵机构的运动和气动特性对权值的影响,以式(7)确定权值矩阵。

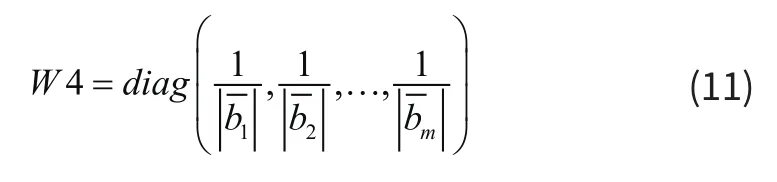
(1)行程限制影响:对于行程大的操纵机构,应分配较高权限,避免行程小的操纵机构提前达到极限,Snell等人以操纵机构行程限制幅值的倒数确定权值矩阵[14],即:

(2)速率限制影响:对于操纵速率快的操纵机构,应分配给较高权限,可加快倾转旋翼机响应速度,Tom Berger基于舵机速率限制的倒数确定权值矩阵[9],即:

(3)带宽限制影响:对于带宽大的操纵机构,应分配给较高权限,可减小发生驾驶员诱发振荡(PIO)的可能,取W3为:

其中Bwm为操纵机构带宽(单位:Hz),W3中对角元素均取值为1/4。
(4)操纵功效影响:对于操纵功效大的操纵机构,应分配给其较高的权限[11],可减小操纵机构的总行程,即:
其中为控制矩阵中的元素,中控制变量增量为其总行程的单位百分比。
(5)响应滞后影响:不同于气动舵面,旋翼操纵响应会有滞后,桨叶挥舞的时间常数约为旋翼旋转1/3圈的时间[16],在其他影响因素相同情况下应分配给响应滞后时间小的操纵机构更高权限,即:

若操纵机构为气动舵面则τ取人的反应时间与舵机时间常数[15]之和,即τ=0.5 + 1 /60;若操纵机构为旋翼操纵则τ=0.5 + 1 /60 + 2 0/Vr,其中Vr为旋翼转速(单位:RPM)。
■3.5 操纵分配计算
除由操纵分配策略确定各通道部分操纵分配系数外,剩余操纵分配系数使用加权伪逆法确定。
(1)纵向通道:由于倾转旋翼机的双旋翼左右对称且旋转方向相反,单个旋翼纵向周期变距和总距引起的横向、航向耦合与另一旋翼相互抵消,升降舵左右对称不产生横、航向耦合。全机纵向通道对横、航向无耦合影响,取,由式(3)计算得到纵向通道操纵分配系数。
(2)横向通道:由于短舱从90°倾转至0°过程中总距差动的操纵功效从横向过渡至航向,而纵向周期变距差动在横、航向均产生较大的操纵功效,全机横向通道对航向存在较大耦合作用。先取由式(3)确定一组操纵分配系数,得到横向对航向耦合为其中取值范围为由式(3)重新计算出多组操纵分配系数,当操纵机构横向操纵功效均与期望方向相同时选择最小对应的一组操纵分配系数。
(3)航向通道:全机航向通道对横向也存在较大耦合作用。采用与横向通道相同方法可得到航向通道操纵分配系数。
由操纵分配结果可知:随着短舱角度减小和速度增大,俯仰通道操纵由纵向周期变距控制过渡至升降舵和总距同时控制,滚转通道操纵由总距差动控制过渡至副翼、纵向周期变距差动和总距差动同时控制,航向通道操纵由纵向周期变距差动控制过渡至方向舵和总距差动同时控制;总距在提供俯仰功效的同时能够减弱由俯仰操纵引起的垂向耦合,副翼的滚转操纵功效占据主导时总距差动和纵向周期变距差动在提供滚转功效的同时能够抵消由副翼操纵引起的航向耦合,总距差动在提供航向功效的同时能够抵消由方向舵操纵引起的滚转耦合。滚转通道操纵分配结果如图3所示。
4 仿真验证
将得到的操纵分配系数矩阵K加入所建立的倾转旋翼机非线性飞行力学模型中,控制系统采用文献[3]中控制参数,在模型中加入不大于4m/s的水平紊流风干扰,然后进行倾转旋翼机直升机模式到固定翼模式的倾转过渡仿真,仿真时间为40s,仿真结果如图4所示。倾转旋翼机过渡仿真的初始状态为:短舱角度90°、速度60 kts、高度200m。在28.5s内短舱角度从90°倾转至0°,速度从60 kts加速到140 kts,过渡轨迹处于过渡走廊范围内;俯仰姿态先低头加速,随着速度增加再抬头,全机升力来源由旋翼逐渐过渡至机翼;过渡过程中高度波动不超过11m。

图3 操纵分配系数随速度和短舱角度变化曲线
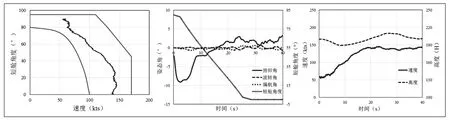
图4 过渡轨迹及各参数随时间变化曲线
整个过渡过程中的平均操纵量计算结果如表2所示,同时列出了相同过渡过程中采用余弦分配法[3]进行仿真时的平均操纵量。由于倾转旋翼机过渡过程中主要使用纵向通道和总距通道,过渡过程中操纵量较大的操纵机构为总距、纵向周期变距和升降舵,表2中统计结果表明倾转旋翼机过渡过程中采用加权伪逆法能够减小操纵机构的总行程。

表2 各操纵机构平均操纵量(百分比)
5 结论
(1)根据对倾转旋翼机非线性飞行力学模型的线化分析,得到各操纵机构在不同速度和短舱角度下操纵功效的变化趋势,确定操纵分配策略。
(2)提出了采用加权伪逆法解决倾转旋翼机操纵冗余问题,加权矩阵考虑了操纵机构行程限制、速率限制、带宽限制、操纵功效、响应滞后等因素的影响,以飞行品质对操纵功效的要求计算得到了随速度和短舱角度变化的操纵分配系数。
(3)针对过渡过程进行仿真,得到的倾转过渡轨迹在过渡走廊边界内,姿态、速度和高度等状态控制效果良好,仿真结果验证了所采用的操纵分配方法及得到操纵分配方案的有效性。
(4)将采用加权伪逆法与余弦分配法的过渡过程的操纵量进行对比,结果表明加权伪逆法能够明显减小过渡过程中操纵机构总行程。
