模板匹配技术在图像识别中的运用
2021-06-16朱泓谕
朱泓谕
(东莞理工学院网络空间安全学院 广东省东莞市 523808)
在模式识别领域,模板匹配属较为常规的方法,确定对象物在图像中的位置,由此完成对象的识别操作。现有经验表明,模板匹配技术在条码识别、指纹识别等应用场景中均具有可行性。
1 模板匹配技术在图像识别中的运用实例
模板匹配技术得以实现的关键前提在于得到数学函数的支撑,准确确定被搜索图的坐标关系,将其代入数学模型内,做相应的处理。模板匹配技术是模式识别领域应用较为广泛、效果较为良好的方法,但在面对各类干扰因素时,需要协同运用数学模型,更好地满足图像识别的质量和效率等层面的要求。
1.1 条码识别
模板匹配技术已经在条码识别领域取得较突出的应用效果,其中变造币横竖条码是基础,确定特定的数轴,在该基础上增添二维图像的灰度投影,再依托于已经建立的数学模型,高效完成在数轴上的匹配操作,期间产生的噪音可相互抵消,可减小干扰,因此有利于提高识别的效率、降低识别错误现象的发生概率。
垂直于水平2 个方向的图像可根据灰度分布特征做特定的灰度投影操作,此方式下将生成模板投影所对应的投影序列,与此同时也能够得到等待匹配图像的投影序列,再将两者加以匹配,确定相关值,将该结果代入投影函数内。模板匹配具有动态化的特性,具体体现在模板投影曲线的层面,其存在上下滑动的变化特点,经过对比分析后,若两幅图具有相匹配的关系,则意味着相关函数最大值较大,即超过门限值。
1.2 指纹识别
依托于模板匹配技术,可以有效缩短指纹识别的持续时间,其中多道计算步骤均可以得到精简处理,由此在较短的时间内完成了匹配操作。整个匹配过程具有阶段化的特征,其匹配操作可以分为多个细分的环节:每间隔M 个点搜索下匹配结果的优劣,从中做出甄别,确定存在极大匹配的周边,针对该范围的参考值的位置做匹配操作,全过程中匹配点得到有效的保留,可以较好地规避匹配点丢失的情况;在前述基础上,对M 个点随机计算,生成突出特征随机序列,其意义在于可决定后续计算误差的先后顺序;经前述流程后,最后抛弃固定阈值,从中选择最具应用价值的单调增长性阈值序列,此时可以规避匹配序列的阈值点丢失的问题,识别结果的精度得到保证。
1.3 字符识别
实际运用中,主要考虑如下两种情况:
(1)采用以特征加权为基础的模板匹配模型。通过特征加权方法的应用,能够对字符笔数做全新的分配处理,根据权重对其顺序做出排列,其中权重较高者集中在中心位置,相比之下权重较低者则普遍分布在边缘处,此时样本模板与标准模板可高效匹配,再借助预设的模糊识别规则,完成相应的识别操作。识别流程中,针对各字符做加权处理,得益于此方式,可有效提高识别率。
(2)采用以特征块为基础的模板匹配模型。针对模板采取切割处理措施,由此得到大小具有一致性的方块,再确定各自所包含的点,完成对标准模板的匹配操作。需注意的是,此处所提的字符在执行匹配操作前便经过了深度的改造处理,因此产生的特征模块数量较少,相比于前述方法而言,其工作量有所精简,在效率方面的优势更为突出。
1.4 基于不变矩的图像匹配
基于不变矩的图像匹配包含多种形式的畸形不变性,是高度浓缩的图像特征。在识别与匹配工作中,围绕图像轮廓和检测模板两部分展开对比分析,向其中增添遗传算法,通过旋转、平移等方法的应用,完成对图像的匹配操作。在该方法之下,所创造的综合应用效果明显优于常规算法。
2 模板匹配序贯相似性检测算法(SSDA)
在数字图像中,依托于如下所提的公式(1)展开计算,确定在点(i,j)时的非相似度m(i,j),将其视为匹配尺度。

图1
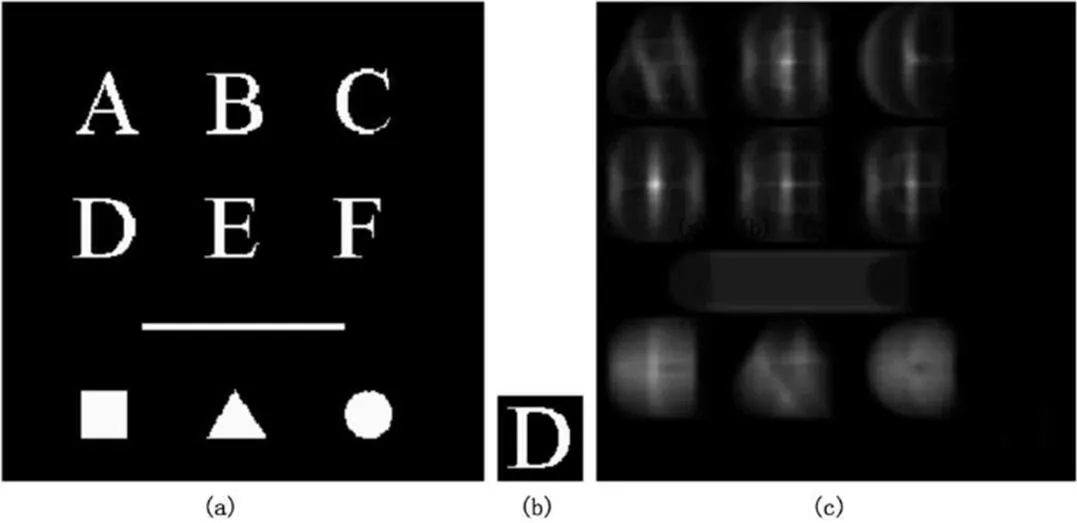
图2:匹配图像

图3:模板处理

在(i,j)处的图像中,若存在与模板相同的图案,此时的显著特征在于(i,j)值明显较小,若不存在则有该值较大的特点。在作加法时,着重考虑的是灰度差的绝对值的和,将其与特定的阈值展开对比分析,若前者偏大,则说明该位置无与模板相同的图案,为进一步做出判断,将会转至下一位置,继而按照相同的方法计算m(i,j)。按照该流程以富有秩序性的方式推进,可以有效缩短计算时间,以较高的效率完成匹配操作。
沿着前述所提SSDA 算法的运用思路,在原有基础上加以优化,以期提高该方法的可行性。对此,对图像上的模板移动做出划分处理,按顺序操作。首先为粗检索,将模板与图像重叠(每隔若干个像素),经计算后确定该匹配的尺度,此操作的作用在于可确定待寻找图案的初步范围;随后进入细检索环节,进一步精准锁定待寻找图案的位置,操作方法为模板每隔1 个像素移动1 次(相比于粗检索而言,模板移动的频率有所增加),由此便可得到具体的位置。
可以发现,在该改进后的SSDA 方法中,模板匹配的次数明显减少,但也存在局限之处,即有可能漏掉图像中最合适的位置。针对此问题,以VisualC++610 为平台,组织开发工作,生成一套数字图像处理程序,在其支持下,能够完成模板匹配运算操作,在提高识别效率的同时避免图像遗漏的情况。
其中,图1 中(a)为原图,(b)为待匹配的模板,(c)为匹配后模板在原图中的位置(可以高效地与原图展开对比分析)。
3 其它的模板匹配快速算法
匹配算法的总计算量取决于两方面因素,具体可利用如下关系式加以表示:总计算量=(选择算法的计算量)×(搜索位置数)。根据此特点,可以探寻除了前述所提内容之外的一些其他具有可行性的方法,具体做如下分析。
3.1 相关算法
关于两个函数的相关性,可用式(2)予以表示:

式中:f*为f 的复共轭;F(u,v)和H(u,v)分别为f(x,y)和h(x,y)的傅立叶变换。
依托于卷积理论,可以对前述公式做进一步的延伸,具体如下:

卷积的重要性在于其在空间域过滤和频率域过滤间扮演着“中间联系者”的角色,是实现匹配的基本前提。具体而言,在匹配工作中,f(x,y)指的是某特定的图像,若要对f 进行分析以便判断其是否含有感兴趣的物体,则需要引入h(x,y),将其视为该物体(此处将该图像称为模板),若能够成功匹配,两函数的相关值会在h找到f 中相应点的位置上达到最大。
结合前述分析,相关算法含两种细分的方法,即在空间域或频率域均可以进行。其中,图2(a)呈现的是大小为M×N 的图像;图2(b)呈现的是寻找与J×K 相匹配的子图,即w(x,y)。具体相关关系可利用如下公式表达:

在两种方法的选择中,可以在频域中实现相关算法。
选取基准图和实时图,将两者做二维离散傅立叶变换。
关于基准图的变换结果,如下:
式中,u 和v 分别对应的是j 和k 方向的频率变量。
关于实时图的变换结果,如下:

3.2 幅度排序相关算法
分阶段完成算法的相应操作:首先,从实时图中提取灰度值,以幅度为依据加以排序,再于该基础上完成二进制编码操作,此时可以实现对实时图的变换处理,即形成集合{Cn,n=1,2,…,N};随后,在确定前述各类二进制序列后,将其与基准图进行相关,全程遵循“由粗到细”的基本原则,在循序渐进的工作方式下,可从中确定合适的匹配点。
3.3 主要问题分析及对应的解决办法
前述所提的模板匹配方法均建立在理论环境中,在理论层面具有高度的可行性,而就实际应用情况来看,其潜在诸多干扰因素,例如多类噪声均会对图像(模板)造成干扰。但在该过程中若模板受到外部因素的干扰,正常工作机制将难以有效运行,会严重影响正常识别进程,因此需针对该部分采取预处理措施,最大限度消除干扰。在此条件下,假定图像中有噪声,则其矢量表现形式为:
式中,f 为确定性图像,n 为噪声,fu为实时图像。在具体分析中,需要着重考虑噪声n 的产生机制以及具体的成因,再消除该部分噪声。从实际环境来看,n 的情况较多,为精准分析以及消噪,则必须明确具体的成因,据此设计滤波器m,利用该装置完成对实时图像的过滤处理,进而达到消除噪声干扰的效果。假定f0=mfu,在该关系式中,最佳状态是f0 尽可能接近f,在此条件下展开匹配运算。而为了完成前述所提的一系列操作,则需要针对图像采取增强、平滑及复原处理措施。
关于受污染的模板,如图3(a)所示。结合图中内容展开分析,在噪声的污染作用下,模板的匹配精度受到影响,其难以精准匹配至原图相应的位置处。针对受污染模板采取还原与增强操作后,得到全新的图像,具体如图3(b)所示,可以发现,此时模板的总体状况得到显著的改善,可以精准地匹配至原图对应的位置。图3 中,在探明噪声干扰的具体作用机制后,可采用滤波的方法加以处理,使模板复原。然而,此类滤波器m 的设计难度较大,因此也是阻碍模板匹配发展的关键因素。在该背景下,应当探寻适用于模式识别的更为可行的发展路径,纵观现有技术水平以及实际发展成果可以得知,以自适应控制、模糊逻辑、神经网络较为典型,其均是综合应用效果较为良好的数学模型建立方法,在模板匹配技术的数学模型建立工作中可灵活应用特定的方法。
4 结语
综上所述,通常而言,模板匹配的识别能力较强,但该特性并不具有绝对性,即在部分干扰较严重的环境中将出现模板匹配识别不适用的情况,或是在模板改动时也存在此类情况。因此,需深入剖析,选择更为可行的数学工具,例如通过自适应控制、模糊逻辑、神经网络等方法的应用,建立科学的数学模型,诸如此类技术均是模式识别领域的重要发展方向。在后续的发展中,应当围绕模板匹配做更为深入的研究,夯实理论基础,提高对先进方法的应用水平,进而建立更为可行性的数学模型。
