双刀多路开关的设计分析
2021-06-11方浩腾徐展
方浩腾 徐展
摘 要:停电检修过程中,因配网开关后端杆塔处未安装验电接地环,只能在开关下桩头挂接地线或新安装验电接地环,停电工作前期需要在不同地点重复进行多次上下杆拉开关挂接地线工作,造成劳动工作量增加,停电时间延长。针对该问题,设计了一种配电网用双刀多路开关装置,该装置采用曲柄滑块机构实现开闭闸,通过双刀协调控制结构与多路同步控制实现开关的自动工作。为使装置达到预期的开闭闸功能,对其进行了运动可行性分析,证实其可有效解决上述问题。该研究为后续双刀多路开关装置的性能及结构优化奠定了基础。
关键词:配网开关接地;双刀多路开关;协调控制结构;同步控制结构
0 引言
随着电网公司对电流接地系统单相接地故障处理的重视以及故障选线、定位技术的发展,电力领域涌现出了一批优秀的接地故障处置方案[1-3]。配网自动化是未来电力行业发展的主要方向,而配网开关接地装置是影响配网发展的重要设备,为了能够确保电力企业稳定发展,一般需要相关工作人员具有配网自动化开关运行的相关知识[4]。传统多路开关只能使得同一线路接通或断开,不能做到两线路接通或断开,技术人员在进行停电检修时,拉开配网开关后需要挂接地线,就只能在下级杆塔有验电接地环处挂接地线,部分开关后端杆塔处未安装验电接地环,则只能在开关下桩头挂接地线或者新安装验电接地环。停电工作前期挂接地线需要在不同地点重复进行多次上下杆拉开关挂接地线操作,造成人员工作量增加,停电时间延长。
在保证不发生配网开关接地故障的前提下,为避免人工进行开关合闸后的复位工作,针对配网开关接地设计了一种双刀多路开关机械装置,并对其进行了结构与设计分析。首先,在开关的下桩头增加一路闸刀,该闸刀控制下桩头与接地环的分合;其次,在原本控制开关分合的操纵杆上增设一套传动装置,该装置既可以控制开关的分合和接地闸刀的分合传动,又可以实现机械闭锁的功能,即保证接地闸刀无法闭合,避免了在线路运行时出现接地闸刀闭合的情况,有效保障了停电检修过程中配网开关操作的便捷性和安全性。
1 双刀多路开关装置的总体结构设计
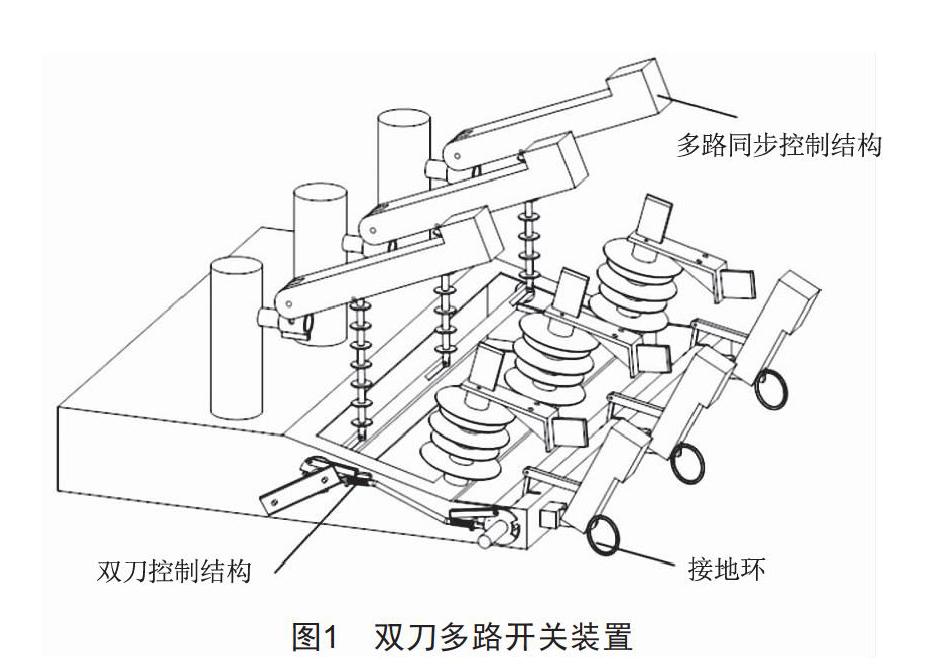
图1为双刀多路开关装置结构图,使用过程中,在开关装置的一侧闭闸时,另一侧则处于开闸状态,从而具有与传统开关装置的不同功能,实现双刀多路一点控制的目的,消除传统开关装置使用时的弊端。
该开关装置主要由主体架、传动结构、控制结构及接地环等部分组成。主体架上固定有静触头,传动与控制结构用于实现双刀多路开关装置的双刀协调与多路同步控制。
2 双刀多路开关装置的主要结构设计
2.1 双刀协调控制结构设计
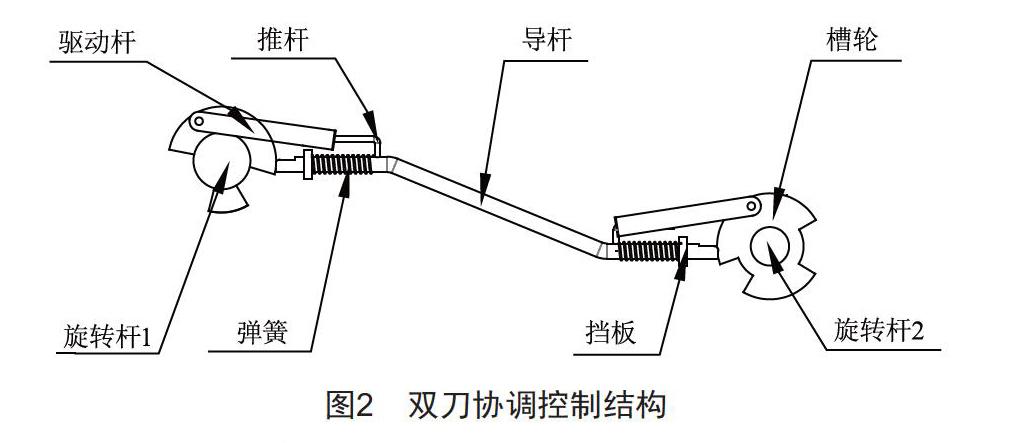
双刀协调控制结构如图2所示,导杆两端焊有推杆,且推杆与旋转杆之间有驱动杆,导杆的运动通过弹簧的弹力来驱动,并且通过连接在主体架侧面的挡板中心孔限制导杆的运动方向,以固定导杆移动的方向;在弹簧与挡板的作用下,同一路的两个动触头不会同时处于闭闸状态。在装置的调式阶段,可通过调节导杆的长度来调节动触头的转动角度。
2.2 多路同步控制结构设计
如图3所示,为了实现多路同步控制,与主体架相连的有旋转杆1与旋转杆2,且两根旋转杆上都固定有小摇臂。不同的是,旋转杆1的小摇臂通过绝缘子与固定有动触头的大摇臂相连;而旋转杆2的小摇臂则通过连杆与大摇臂连接。旋转杆转动即可同步控制多路动触头。
3 双刀多路开关的工作分析
3.1 动触头的控制机构分析
同路的两个动触头根据结构中部件的运动关系,其运动机构都可简化为曲柄滑块机构。为了分析该装置组成构件的运动是否具有确定性,选取动触头1作为研究对象,绘制其机构运动简图,如图4所示,并进行自由度计算。
活动构件3个、低副4个、高副0个,则机构自由度計算如下:
F=3N-2PL-PH=3×3-2×4=1 (1)
由此可知,该机构自由度为1,因此,根据机构具有确定运动的条件可以判断,开闭闸控制模块具有确定的运动。
3.2 工作状态分析
装置在初始工作状态时,在导杆两端分别与旋转杆1和旋转杆2上的槽轮外圆贴合,两个弹簧在固定挡板的作用下预存一定的弹力作为驱动力。
为了确定装置可以通过该预存弹力进行工作,在此对弹簧的弹性系数与弹簧压缩量进行选择与设计。为保障该双刀多路开关能正常安全工作,预存弹力至少应为10 N,选取硅青铜线作为弹簧线材较为合适,其刚性模数为41 000 N/mm2[5],线径为1.5 mm,外径为6 mm,有效圈数为22。
式中:G为线材刚性模数(N/mm2);d为线径(mm);Nc为有效圈数;D0为外径(mm)。
f=kΔx (3)
式中:f为弹力(N);k为弹性系数(N/mm);Δx为弹簧压缩量(mm)。
将式(2)代入式(3),可得到弹簧压缩量至少应为0.77 mm,并且在装置初始工作状态下,两个弹簧压缩量相同,满足应预存弹力数值,可进行正常工作。
4 结语
(1)本文采用了曲柄滑块机构,并通过机械结构实现双刀协调控制与多路同步控制,设计了一款双刀多路开关机械装置。
(2)以动触头1为例,对该装置进行了机构运动可行性验证,并具体分析描述了工作过程,表明该装置能够达到预期的开闭闸功能,满足设计要求,为双刀多路开关的结构优化提供了参考。
(3)根据正常工作中所需要的驱动力,选取设计合适的弹簧,为双刀协调控制的稳定性与准确性提供了保障。
[参考文献]
[1] 郭丽伟,薛永端,徐丙垠,等.中性点接地方式对供电可靠性的影响分析[J].电网技术,2015,39(8):2340-2345.
[2] 连磊.10 kV配电网接地方式与接地故障选线研究[D].西安:西安理工大学,2017.
[3] 彭沙沙,曾祥君,喻琨,等.基于二次注入的配电网接地故障有源电压消弧方法[J].电力系统保护与控制,2018,46(20):142-149.
[4] 姚伟文.配网自动化开关故障处理及运行维护[J].数码设计(上),2019(10):166.
[5] 成大先.机械设计手册[M].5版.北京:化学工业出版社,2008.
收稿日期:2021-02-23
作者简介:方浩腾(1993—),男,安徽安庆人,工程师,研究方向:电气自动化。
