岸桥俯仰卷筒联轴器选型与传动问题应对措施
2021-06-11钟毅

摘 要:岸桥俯仰卷筒联轴器主要有鼓形齿式联轴器和滚柱耦合联轴器两种,各有特点和优点,可依据联轴器不同的结构特点和力学计算进行选型。为计算所能承受的载荷,建立一次超静定的补充微积分方程,求解得出在相同外力下滚柱耦合联轴器所受的弯矩小于鼓形齿式联轴器的结果,再用转矩和最大径向载荷来校核。在大量实际应用中,鼓形齿式联轴器在传动时常常出现噪声和齿面啮合伤痕等外在问题,现有针对性地阐述了所采取的复杂的应对措施。采用滚柱耦合联轴器可以从根本上消除机构联轴器传动问题,避免复杂的联轴器轴向和径向调整。
关键词:鼓形齿式联轴器;滚柱耦合联轴器;选型;力学计算;一次超静定微积分方程;不同弯矩
0 引言
岸桥俯仰机构和钢丝绳缠绕系统的俯仰功能作用,其一是船上最高高度超过前大梁箱体底面(高度限定值)时,前大梁仰起,避免船体及其上装载的集装箱堆垛与前大梁发生碰撞;其二是台风季节仰起并借助安全钩系统刚性固定岸桥前大梁,以提高抗风能力。仰起前大梁的动作由俯仰机构、钢丝绳缠绕分系统和上铰点组成的俯仰系统来完成。俯仰传动过程是机房内俯仰机构的电机驱动减速箱,减速箱输出转矩,联轴器带动卷筒转动,钢丝绳逐渐缠绕在卷筒上。钢丝绳牵引前大梁上的定滑轮组,使得前大梁绕上铰点逆时针转动,这是仰起动作;反之,将钢丝绳从卷筒上释放,前大梁绕上铰点顺时针转动就会引起大梁向下俯降。
俯仰卷筒联轴器主要有两种:鼓形齿式联轴器和滚柱耦合联轴器。为了从实际运行效果上优化联轴器的选型,岸桥制造基地随机选取47台岸桥的俯仰系统运行情况进行汇总统计。统计结果表明,有20台俯仰机构中的低速联轴器传动时存在明显传动噪声,占比可达42%,成为影响项目发运周期和制造节点产值实现的瓶颈因素之一。为从根本上解决该问题,本文聚焦俯仰机构联轴器的选型、力学计算和装配过程进行分析,并针对目前多数岸桥采用的鼓形齿式联轴器制订应对措施。
1 卷筒联轴器的选型和安装
1.1 鼓形齿式联轴器
1.1.1 结构形式和组成
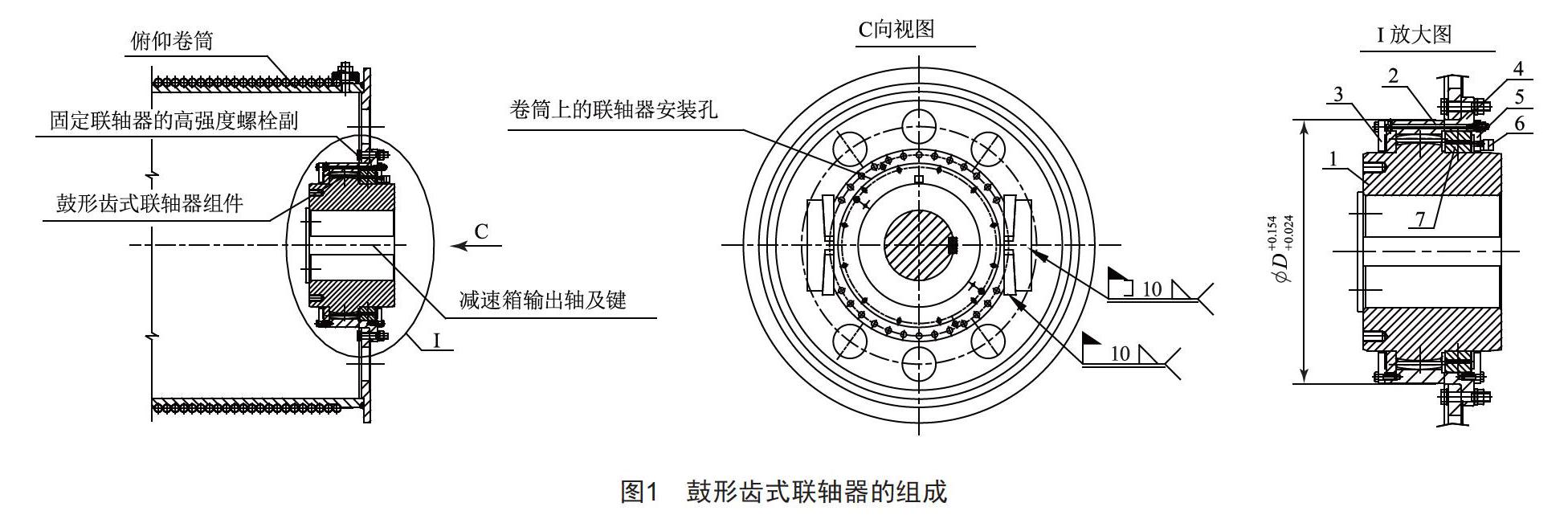
鼓形齿式联轴器属于一种刚性联轴器。鼓形齿的特点为球面的外齿、球面中心在齿轮轴线上,齿侧间隙较一般直齿轮大。鼓形齿式联轴器相对于早期的直齿联轴器允许较大的角位移,可以改善齿的接触条件,提高传递转矩的能力,延长使用寿命。在岸桥领域主要用于连接俯仰机构的减速箱输出轴与钢丝绳卷筒,既能传递转矩,又能承受径向载荷,工作温度-25~80 ℃。鼓形齿式联轴器主要由外齿轴套1、内齿圈2、内端盖3、外法兰4、外端盖5、齿面磨损指示器6和承载环7等零件组成,如图1所示。其中,承载环位于外齿的轴向外侧,且为一整环结构,与外齿轴套之间通过过盈配合连接。
1.1.2 安装要求
整体式承载环的鼓形齿式联轴器要求在运行工况下,卷筒中心线与减速箱低速轴中心线之间夹角小于10′。这个要求在卷筒不受外载荷情况下是能够达到的;但在大梁俯仰时,卷筒受到沿切线方向的拉力,用百分表测量卷筒端面上下左右相互垂直的4个象限点,发现轴向最大变化0.63 mm。经反三角函数求解角度计算,得出卷筒中心线与减速箱低速轴中心线之间的夹角变化约2.2′。可以推导出,鼓形齿式联轴器在不受外载荷时需符合夹角不大于7.8′的要求。
1.1.3 传动的复杂性
齿式联轴器从安装到精度合格,需要大量调整轴向和径向的中心线。轴向偏差在传动中能产生相当大的附加力。附加力使轴变形,变形的轴在转动过程中会产生交变弯曲应力,导致轴的金属材料疲劳;齿轮的齿承受额外的轴向分力载荷、轴向滑移,齿轮轴向间隙为零或者轴向过盈,在机构初期运行中,内外齿的啮合会产生“格格格”的不顺畅噪声,长期运行必然对齿轮齿造成损伤。
1.1.4 检测手段的局限性
由于齒轮啮合在联轴器和卷筒内部,没有非拆解的技术手段直接测量实际啮合线长度、齿根间隙、齿面间隙、承载环间隙等关键数据,从而不能直接根据测量数据和计算重合度来判定齿轮啮合是否正常。
1.1.5 优点
鼓形齿式联轴器的优点在于加工工艺成熟,精度稳定,价格不高,性价比较高,故在岸桥机构上被广泛应用。
1.2 滚柱耦合联轴器
1.2.1 结构形式和组成
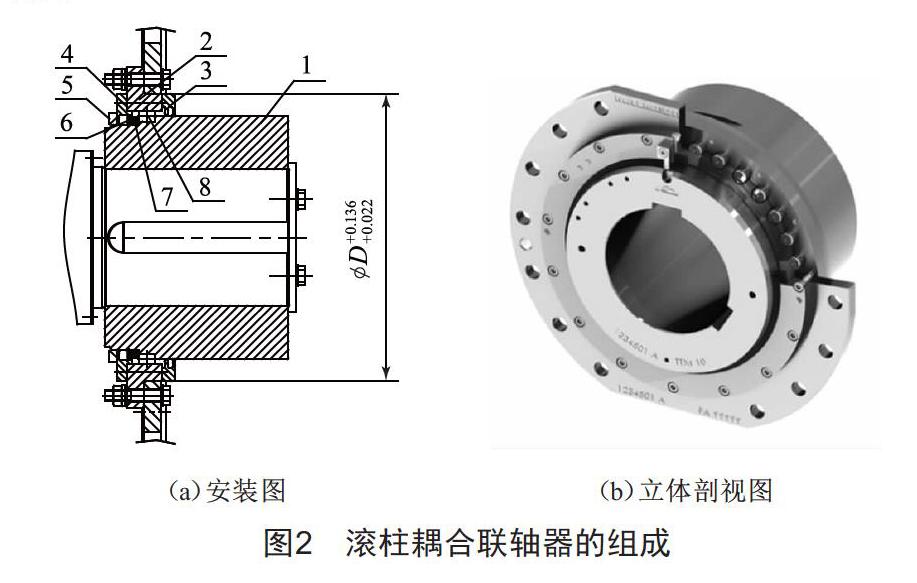
滚柱耦合联轴器是齿式联轴器进一步发展、完善的新型号,已被多年的机构运行证明了其优良的工作性能。滚柱耦合联轴器由轴套1、壳体2、内端盖3、外法兰4、齿面磨损指示器5、止推环6、压环7和滚柱8等零件组成,如图2所示。
1.2.2 传动原理
滚柱耦合联轴器通过在轴套和壳体的两个半圆耦合孔中的滚柱来传递转矩并承受径向力,兼起调心轴承的作用,可补偿减速器的输出轴与卷筒轴两中心线之间的角位移。其构成和机理与弹性柱销齿式联轴器相类似。为增加滚柱与耦合孔的接触硬度,滚柱的表面经淬火处理。联轴器的外法兰和卷筒法兰之间使用10.9级高强度螺栓连接,依靠摩擦力压紧法兰面,转矩通过这个摩擦力传递到钢丝绳卷筒。
1.2.3 传动特点
滚柱耦合联轴器不仅能传递扭矩,而且能承受较大的径向载荷,具有以下特点:
(1)滚柱与耦合的圆弧面啮合、滑动,滚柱与耦合的槽孔轴向有1.4 mm间隙。该结构特点可以安全承受较大的底部径向载荷,并且允许较低的弯曲负荷。补偿轴中心线的夹角可达±1°,起到“自动补偿”的调心作用。轴向中心线错位范围在3~8 mm。在实际应用中,采用滚柱耦合联轴器的俯仰机构罕有传动问题,占比仅有1%~2%,应对措施与齿式联轴器一致。
(2)对鼓形齿轮的渐开线啮合和滚柱耦合的圆弧面啮合的齿根弯曲应力进行比较,因相邻槽孔之间的圆弧面母材宽度a大于齿根宽度b,故弯曲应力明显降低,如图3所示。
(3)载荷的侧向分力使耦合孔的接触面局部加工硬化,从而使孔面更加耐磨。
(4)在较大范围内滚柱承受扭矩和径向载荷引起的压弯应力,而孔并不承受这种应力。这种设计排除了因压弯应力导致的断裂风险。
1.3 两种联轴器的受力和弯矩分析
1.3.1 鼓形齿式联轴器的力学计算
在对鼓形齿式联轴器进行受力分析时,把卷筒、联轴器、减速箱轴简化为一根简支梁。承载环由一个铰接头代替,两处轴承支撑和一处承载环支撑,卷筒受到两根钢丝绳施加的拉力,受力简图、剪力图和弯矩图如图4所示。三个支反力和两个已知外力构成超静定问题,且超静定次数为一次。最大弯矩发生在齿轮轴的m-m截面上。
应用静力学方程和卡氏定理求解全部支反力,计算过程如下:
静力学方程:
Ma=F1×L+F2×23.3L-Rb×23.8L-Rc×25.8L=0 (1)
将F1=F2=153 kN代入式(1),求得:
Rb=156.2-1.1Rc (2)
Ra+Rb+Rc=306 (3)
将Rb代入式(3),求得:
Ra=149.8+0.1Rc (4)
式中:Ma为对于支点a的弯矩;F1、F2为钢丝绳1和钢丝绳2施加于卷筒上的外力,大小相等且为153 kN,方向相同;Rb为支点b处的支反力;Rc为支点c处的支反力;L为钢丝绳1中心至支点a的长度,为简化计算,设为当量长度;23.3L为钢丝绳2中心至支点a的长度;23.8L为支反力Rb至支点a的长度;25.8L为支反力Rc至支点a的长度,长度单位均为米。
梁分为a—1段、1—2段、2—b段和b—c段4个区间。
列a—1段的弯矩方程,设a—1段任意截面距支点a为x,保留左侧段并代入式(4),则:
M(x)=-Rax=-(149.8+0.1Rc)x (5)
列1—2段的弯矩方程,设1—2段任意截面距F1作用点为y,保留左侧段并代入式(4),则:
M(y)=-Ra(L+y)+F1y=-(149.8+0.1Rc)(L+y)+153y (6)
列2—b段的弯矩方程,设2—b段任意截面距支点b为z,保留右侧段并代入式(2),则:
M(z)=-Rbz-Rc(2L+z)=(1.1Rc-156.2)z-Rc(2L+z) (7)
列b—c段的弯矩方程,设b—c段任意截面距支点c为s,保留右侧段,则:
M(s)=-Rcs (8)
对式(5)(6)(7)和(8)分别求偏导:
?鄣M(x)/?鄣Rc=-0.1x (9)
?鄣M(y)/?鄣Rc=-0.1(L+y) (10)
?鄣M(z)/?鄣Rc=0.1z-2L (11)
?鄣M(s)/?鄣Rc=-s (12)
由卡氏定理得補充微积分方程:
将式(5)~(12)代入式(13),解得Rc=41.8 kN,Ra=
153.98 kN,Rb=110.22 kN,M(z)=-159.61L kNm。
1.3.2 滚柱耦合联轴器的力学计算
与鼓形齿式联轴器不同,滚柱耦合联轴器受力分析时,滚柱将梁分为两段。联轴器的卷筒一侧和减速箱一侧分别视为两根简支梁,每根梁上受两个支反力和一个已知外力构成静平衡力系,受力简图、剪力图和弯矩图如图5所示。
对于滚柱耦合联轴器的简支梁,应用静力学方程求解出全部支反力。
联轴器左段:
对支点b的弯矩:
Mb=-Ra×23.3L+F1×22.3L=0 (14)
将F1=153 kN代入式(14),求得:Ra≈146.4 kN。
Ra+Rb=306 (15)
将Ra=146.4 kN代入式(15),求得:Rb=159.6 kN。
联轴器右段:
Md=Rb×2.5L-Rc×2L=0 (16)
将Rb=159.6 kN代入式(16),求得:Rc=199.5 kN。
Rc+Rd=Rb (17)
将Rc=199.5 kN、Rb=159.6 kN代入(17),求得:Rd=-39.9 kN。
列b—c段的弯矩方程:
M(z)=-Rb×0.5L (18)
将Rb=159.6 kN代入式(18),得:Mc=-79.8L kNm,故在截面m-m弯矩减小约一半。
式中:Mb为对于支点b的弯矩;Md为对于支点d的弯矩;Rd为支点d处的支反力;22.3L为钢丝绳1中心至支点b的长度;2.5L为支反力Rb至支点d的长度;2L为支反力Rc至支点d的长度,其余符号含义同前。
对于给定的相同钢丝绳载荷,前者最大弯矩发生在鼓形齿式联轴器的承载环上;后者不是在滚柱耦合联轴器上,而是发生在卷筒钢丝绳受力点和减速箱低速轴轴承上,且最大弯矩减小约一半。优化设计可以大大减小结构尺寸,满足用户重量轻、安装空间小的要求。相比鼓形齿式联轴器,轴套的宽度尺寸减少1/2左右,联轴器壳体外形宽度仅有鼓形齿式联轴器的15%左右。
从以上两种联轴器的对比可以看出,滚柱耦合联轴器性能优良,安装简便,使用寿命長。但目前国内制造商因其材料和加工精度要求高,加工设备、工艺复杂,几乎没有生产。岸桥制造商只能依赖进口,价格居高不下,限制了其在岸桥上的广泛应用。
1.4 用联轴器的主要参数复核
1.4.1 转矩
依据马达功率N、马达转速n、运行时间和工况常数C计算联轴器所需的最大转矩Tmax,其必须小于联轴器能提供的最大允许转矩520 kNm。工况常数C按用户码头工况(每俯仰一次需约12 min,每天平均6次)属于1Bm级,取C=1.25。钢丝绳的公称抗拉强度1 960 N/mm2,马达功率N=360 kW,卷筒转速n=17.2 r/min,减速器传动效率η=0.885。
计算公式为:Tmax=C×η×(N×9 550)/n≈221.2 kNm<520 kNm,故联轴器转矩满足要求。
1.4.2 最大径向载荷
根据最大工作载荷Q、卷筒重量和卷筒钢丝绳重量G、缠绕系统滑轮传动比i和效率η,计算最大径向载荷Fmax,必须小于联轴器所能承受的最大径向力355 kN。缠绕系统滑轮传动比i=3,滑轮组效率η=0.91。
计算公式为:Fmax=(Q+G)/(i×η)=153 kN<355 kN,故联轴器径向载荷满足要求。
2 鼓形齿式联轴器传动问题的原因
原因可能有:联轴器装配不准确,机构安装底架梁弯曲,受载荷的长卷筒轴向弹性变形,卷筒的滚柱(或滚珠)轴承的高磨损,联轴器外齿圈内孔圆度和外齿轴套安装孔圆度等,都会导致卷筒中心线与减速箱低速轴中心线之间夹角超差。
以联轴器外齿圈内孔圆度和外齿轴套安装孔圆度为例进行说明。拆下有运行噪声的联轴器,联轴器外齿圈内孔圆度超差0.1 mm左右,运行时失圆度肯定更大。卷筒的联轴器外齿轴套安装孔圆度检查发现,卷筒内孔也存在圆度超差。卷筒与联轴器理论最大间隙仅为0.15 mm,强力安装使联轴器外齿套受到挤压而变形。
3 传动问题处理的应对方案
卷筒联轴器的外齿圈内孔圆度和卷筒与之相配合的安装孔的圆度超差,是现场出现频率较高的问题,可采取以下应对措施:
3.1 联轴器受载变形控制
重新校核联轴器所能承受的轴向、径向载荷,增加鼓形齿式联轴器的齿面硬度和内齿圈壁厚,放宽装配配合间隙。卷筒在受载后卷筒中心线与联轴器中心线的夹角变大,采用在卷筒轴承座下方增减垫板的厚度、微调卷筒的径向位置两种方法来补偿抵消这种变化。若不能优化结构,在设计阶段宜采用滚柱耦合联轴器。
3.2 俯仰机构联轴器装配过程质量控制
在安装前、受载前和受载后的各阶段实时测量联轴器安装孔、联轴器内孔、联轴器外圆、俯仰卷筒与联轴器相关配合间隙和中心线夹角,及时处理尺寸超差和配合超差,保证各尺寸和配合间隙符合图纸要求。装配联轴器时严格按工艺规程操作,严禁施加外力强行装配。
3.3 优化卷筒机加工工艺
为保证俯仰卷筒的联轴器安装孔的圆度和公差,孔的加工工序调整到最后工序来完成,并且由一次加工到位优化为粗加工和精加工两道工序。虽然增加了一次加工卷筒的装夹工作量,但缩短排装工时约20%,减少了拆装联轴器、抛光配孔的工时,节约费用约5 000元/台。卷筒上用于固定低速联轴器的26个?准26螺栓孔,由用实心钻头钻孔更换为用空心钻头,减少了钻孔的切削热量,有利于将孔的圆度和法兰面的平整度控制在设计要求范围内。
4 结语
集装箱运输船越来越向大型化发展,而十级及以上台风发生频率逐渐增加,大型岸桥俯仰机构的重要性和可靠性越发突显。基于鼓形齿式联轴器和滚柱耦合联轴器的结构特点和力学计算,滚柱耦合联轴器对于俯仰卷筒受载角变形的“自动补偿”作用明显。相比之下,纠正联轴器的传动问题应对措施工序复杂,耗时费力,成本较高。滚柱耦合联轴器批量制造后完全可以取代鼓形齿式联轴器。
收稿日期:2021-02-22
作者简介:钟毅(1971—),男,江西赣州人,工程师,研究方向:工程系列工艺技术。
