一种零件表面点云数据的获取方法
2021-06-11刘永治郭忠超周玲赵倚林
刘永治 郭忠超 周玲 赵倚林
摘 要: 零件表面的点云数据可用于零件表面的缺陷检测,零件表面缺陷是造成零件生产损失的主要原因之一,因此提出一种基于线激光扫描的零件表面点云数据获取方法。首先对相机进行标定,可用于对相机采集到的图像进行矫正,同时得到相机的内外参数,用于后续图像处理的坐标转换;再利用图像采集系统采集图像,对图像依次进行高斯滤波、图像差分、高斯平滑、条纹中心线提取、坐标转换,得到零件表面的三维点云数据。零件表面的点云数据可用于判断零件表面是否有缺陷存在,从而减少由于缺陷而造成的损失。
关键词: 表面缺陷; 线激光; 坐标转换; 点云数据
中图分类号:TN249 文献标识码:A 文章编号:1006-8228(2021)03-46-03
Method for acquisition of point cloud data on part surface
Liu Yongzhi, Guo Zhongchao, Zhou Ling, Zhao Yilin
(School of Mechanical and Electrical Engineering, Xi'an Polytechnic University, Xi'an, Shannxi 710600, China)
Abstract: The point cloud data on the surface of part can be used to detect the defects on the surface of the part. The surface defect of part is one of the main reasons for the production loss of parts. Therefore, a method of obtaining the point cloud data on surface of part based on line laser scanning is proposed. Firstly, the camera is calibrated, which can be used to correct the image acquired by the camera, at the same time, the internal and external parameters of the camera are obtained, which can be used for coordinate conversion of subsequent image processing. Then the image is acquired by the image acquisition system, and the image is successively processed by Gaussian filtering, image difference, Gaussian smoothing, stripe centerline extraction and coordinate transformation, so as to obtain the 3D point cloud data on the part surface. The point cloud data on the part surface can be used to judge whether there are defects on the part surface, so as to reduce the loss caused by the defects.
Key words: surface defect; line laser; coordinate conversion; point cloud data
0 引言
中国是世界上的一个制造大国,每天可以生产出大量的工业产品,随着产品的全球用户越来越多,对产品质量的要求越来越严格,生产企业对产品质量的要求也提升到了一个很高的级别[1]。产品除了完整的使用功能,還包括产品质量,如使用者的视觉体验,即表面缺陷[2]。产品在生产以及制造过程中,往往不可避免的会产生表面缺陷,表面缺陷不但会严重影响其美观以及舒适度,而且还会大大影响其使用性能[3]。然而目前的检测方法大多集中在二维视觉检测上,这种检测方法只能得到产品反射回来的亮度信息,根据其亮度信息一般只能得到其轮廓信息,而产品的深度信息大多丢失。一般来说,零件表面缺陷大多数都会有比较明显的三维特征,例如深度信息、高度信息,三维视觉可以直接、方便地获取缺陷的完整信息,并且三维视觉拥有更多的信息量,其中包含有二维信息[4]。
鉴于上述情况,本文提出了一种基于线激光扫描的零件表面点云数据获取的方法,获取的点云数据可用于后续的零件表面缺陷检测,减少损失。
1 系统设计
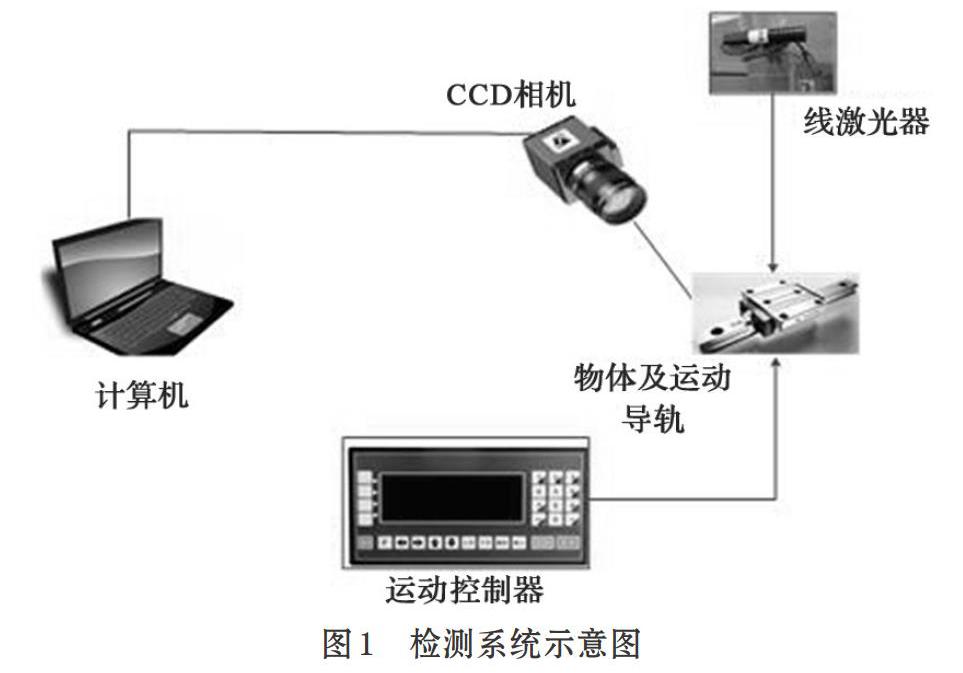
如图1所示,该检测系统包括三个功能模块:图像采集模块、图像处理模块、运动控制模块。图像采集模块由线激光和CCD(电荷耦合器件)组成。图像处理模块由计算机和相关算法组成。运动控制模块由运动控制器组成。
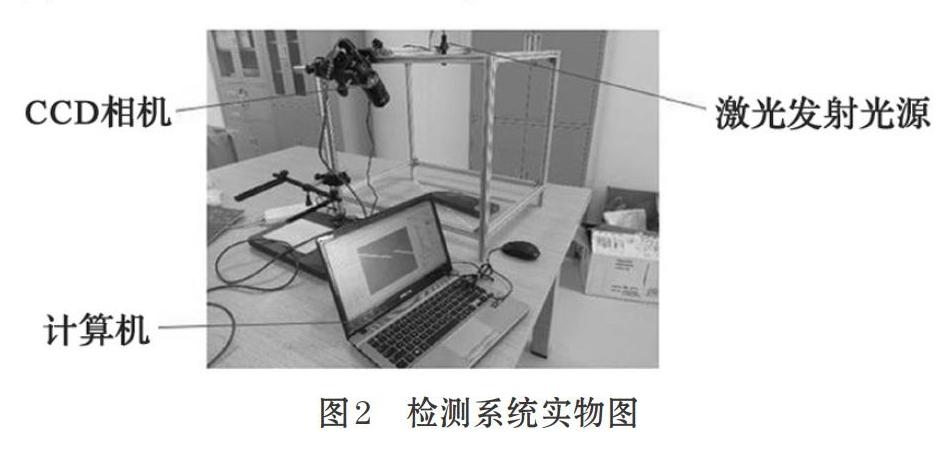
如图2所示,在该系统中,线激光的型号为FU650AB100-GD16,输出波长635nm,在1.5米处的线宽0.8mm。CCD的型号为MER-031。图像尺寸为640×480。Fps(每秒帧)为860fps。相机镜头的型号为TEC-M55MPW-55mm。
2 原理介绍
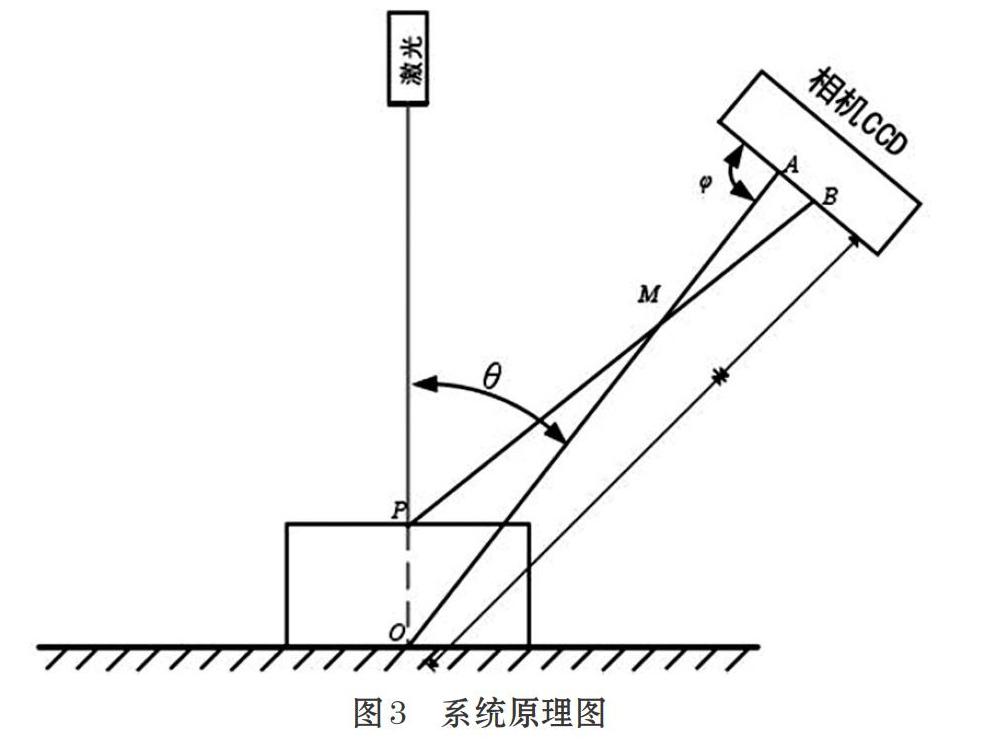
该测量系统的系统原理图如图3所示,采用的测量原理是激光三角法原理,激光三角测量法是用激光投射在被测物体上,利用包含高度信息的带有条纹图案的图像来获取物体表面的点云数据。首先,将激光器、摄像机和移动平台放置在适当的位置并固定。然后采用张正友平面标定法对相机进行标定,获取相机的内部参数和外部参数,接着对光平面和移动位姿进行标定,获得相应的矩阵。然后让激光做匀速直线运动,使得激光线能够均匀稳定地扫描整个物体表面。最后,利用前期相机标定的参数和带有条纹图案的图像,可以获得物体表面轮廓的三维数据。
首先将线激光投射到物体表面,在激光线受物体高度变化而发生调制后,成像光束的角度也会改变,因此图像在CCD相機上的相应成像位置也会改变。通过对该光学系统进行几何结构的构建,解析出其几何结构参数和对应CCD上图像像点位置的改变,可以获得物体表面形态变化。
3 点云数据的获取
首先对相机进行标定,获取到的相机标定图如图4所示,得到相机的内外参数,相机的参数可用于图像上的点从二维平面像素坐标到三维世界坐标的映射[5],从而得到零件轮廓表面的点云数据。完成相机标定之后,用CCD相机采集无条纹图案的图像,采集到的带扫描物体如图5所示,以及在线激光照射下的条纹图像,线激光扫描物体如图6所示,并对采集到的图像进行对图像进行高斯滤波处理可以减少图像中的噪声和伪影。图像的差分运算就是把两幅图像对应的像素值相减,削弱图像的相似部分,突出显示由于物体高度变化而发生调制的激光条纹图像。对差分图像进行高斯平滑,进一步减少噪点对后续图像处理的干扰。找出每列最亮像素并对其Hough变换,即对激光条纹图像做细化处理,以提高后续运算的效率和精度。经Hough变换检测直线后的图像,利用激光三角法原理生成点云数据。对获取到的物体表面的点云数据进行显示,如图7所示。
4 结束语
本系统实现了基于线激光的零件表面点云数据获取,该系统利用激光三角法原理来获取零件表面的点云数据。在图像预处理之前,先对相机进行标定,可消除相机本身的畸变对采集到的图像的影响,同时得到相机的参数,用于后续的坐标转换,可以提高程序的运行效率。在图像处理阶段,先对激光照射下的图像进行条纹中心线的提取,可减少后续程序的运算量,并提高程序运算结果的准确性。
参考文献(References):
[1] 汤勃,孔建益,伍世虔.机器视觉表面缺陷检测综述[J].中国图象图形学报,2017.22(12):1640-1663
[2] Singh A, Dutta M K, Partha Sarathi M, etal. Image processing based automatic diagnosis of glaucoma using wavelet features of segmented optic disc from fundus image[J].Computer methods and programs in biomedicine,2016.124:108-120
[3] H?rter S, Klinger T, Franke J, et al. Comprehensive correlation of inline inspection data for the evaluation of defects in heterogeneous electronic assemblies[C]//2016 Pan Pacific Microelectronics Symposium (Pan Pacific).IEEE,2016:1-6
[4] 贾云得.机器视觉(第一版)[M].科学出版社,2000.
[5] 位洪军.单线激光扫描三维测量技术研究[D].天津大学,2012.
