NORBIT iWBMS多波束测深系统在宁波市三江河道监测中的应用
2021-06-11曹公平周小峰
曹公平,周小峰,凌 佳,徐 浩
(1.浙江省水利河口研究院(浙江省海洋规划设计研究院),浙江 杭州 310020;2. 宁波市河道管理中心,浙江 宁波 315020)
甬江是浙江省八大水系之一,由姚江和奉化江两江汇合于宁波市区的三江口,经镇海口流入东海。三江河道在防洪、航运、城市景观等方面发挥着重要作用,是宁波市社会经济快速稳定发展的重要保障。采用NORBIT iWBMS多波束测深系统开展三江河道监测工作,为河道数字化、信息化与精细化管理提供更加丰富的水下三维空间信息,是完善三江河道监测体系的一项重要举措。
1 系统介绍
1.1 系统组成
NORBIT iWBMS集多波束声呐基阵、高精度卫星/惯性导航系统、表面声速计于一体,是一款高度集成、高分辨率的高端多波束测深系统。水下单元集成POS MV(Position and Orientation Systems for Marine Vessels)WaveMaster惯导系统(INS),为船载测量员提供较好的数据采集体验;利用集成声速探头在宽波段上使用窄波束,显著减少波束传播;曲面阵列允许更宽容声呐领域的表面声速变化,完成最先进的信号增益补偿和专有的振幅、相位检测算法,实现对底部进行精确和可重复检测;传输声呐可以扫描20个沿轨道扇区,实现三维扫描。
NORBIT iWBMS多波束测深系统提供多种紧密集成的水深测绘方案,具有高度集成、宽覆盖扫测、免校准操作、安装方便、便于携带、功耗低等优点。主要技术参数见表1。
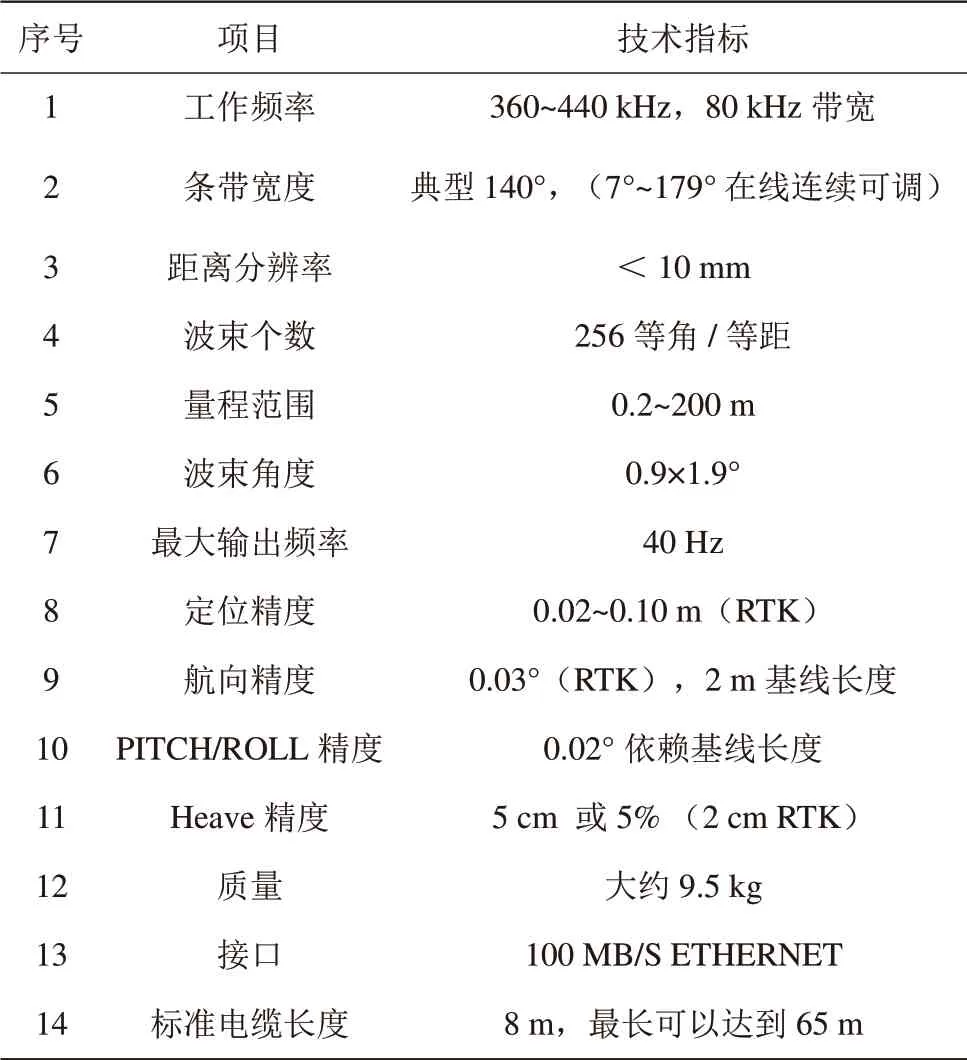
表1 NORBIT iWBMS多波束测深系统主要技术参数表

续表1
1.2 工作原理
NORBIT iWBMS多波束测深系统的工作原理是利用发射换能器阵列向水底发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对水底地形的照射脚印并对其进行处理,一次探测就能给出与航向垂直的垂面内上百个甚至更多水底测点的水深值,从而能够精确、快速地测量沿航线一定宽度内水下目标的大小、形状和高低变化,描绘水下地形的三维特征。
NORBIT iWBMS多波束测深系统通过对水下地形地貌进行大范围全覆盖测量及实时声呐图像显示,结合全球定位系统实时动态测量(RTK),迅速获得各种比例尺的水下地形图、DTM数字地面模型,测量成果可以精确反映水下细微的地形变化和目标物情况,极大提高测量精度和效率。
2 应用实例
2.1 项目水域概况
三江河道是宁波市主要行洪排涝通道,也是沟通内陆与外海的重要海运通道。姚江属平原型河流,从新江口至姚江闸段长79.1 km,河床平坦,逶迤曲折,平均水深约5.0 m;奉化江方桥至三江口河道长27.7 km,河道曲折多湾,系感潮河段,平均水深约5.0 m;甬江干流指姚江、奉化江汇合于宁波市区的三江口后至镇海游山外出口段,全长26.3 km,平均水深约5.7 m,为宁波市主要航道及姚江、奉化江主要出海通道。
为便于说明NORBIT iWBMS多波束测深系统在三江河道监测中的应用情况,更直观地展示水下三维测量成果,选取奉化江江夏桥至长丰桥段4.3 km河道进行重点介绍,该段河道地处宁波市中心城区,河道最宽处约152.0 m,最窄处仅84.0 m,且堤脚外39.7 m内高度落差达11.6 m,坡度为29%,具有一定代表性。
2.2 实施过程
2.2.1 测线布设
为实现测量区域全覆盖,主测线布设方向与河道走向一致,主测线根据测区水深减去换能器吃水的2.5倍间距布设,主测线重叠率大于30%;河道边缘等斜坡以及码头等不便测量区域,NORBIT iWBMS多波束测深系统开角设定为140°。共计布设奉化江江夏桥至长丰桥段4.3 km河道主测线160.0 km,检查线与主测线垂直,按总里程不少于主测线1%进行布设。
2.2.2 数据采集
2.2.2.1 现场设备安装
现场测深选用测量船,船长4.96 m,宽2.38 m,吃水1.30 m。将船重心位置设为参考点建立船体坐标系,船舷左侧方向定义为X轴正方向,船头方向定义为Y轴正方向,垂直向上方向定义为Z轴正方向。NORBIT iWBMS多波束测深系统安装在船体左弦靠近参考点的位置,其中换能器安放在船体左舷距离参考点最近的位置并进行固定;GNSS数据接收天线安放在较高的罗经甲板上,避免船上桅杆遮挡及无线电波干扰。依据三江河道实测地形资料,测深时换能器探头向外倾斜15°,这样既避免测量过程中产生晃动和下沉等情况影响测量精度,又可有效扩大河道边坡的覆盖范围,获取浅水数据,实现全覆盖测量。
2.2.2.2 声速改正
由于水体中水声速结构的不均匀性,导致声波传播方向改变,形成声速弯曲,直接影响测深精度。因此,测深前使用声速剖面仪分时分段进行人工测量获取数据,通过软件完成声速改正十分 重要。
2.2.2.3 现场测量
设备安装完成后,通过软件对换能器安放位置相对于船体重心位置进行姿态校准,对GNSS数据接收天线的位置进行姿态改正,同时对其他仪器设备进行检查调试,观察运行状态、信号接收质量等情况,确定无误后可开展测量作业。施测时,航速保持稳定,控制在4~6节。用NORBIT iWBMS多波束测深系统配套的显控软件和导航软件完成设备工作控制、数据采集显示和测量导航功能。测区数据采集航迹线见图1。

图1 测区数据采集航迹线图
2.2.3 数据处理
数据采集软件对各传感器上获取的数据进行处理,主要有人机交互式编辑和自动滤波2大类。人机交互式编辑采用人机交互界面,直观性较强,可靠性较高,但工作效率较低,编辑结果与操作者能力、经验有关,具有一定的主观性;自动滤波采用数学处理方式,通过软件设定各项合理的过滤参数删除大部分假信号,从而获取真实数据,工作效率高,但处理结果的可靠性与所采用的数学方法有关,具有一定的不确定性。此次采用人机交互和自动滤波相结合的数据编辑方法来实现数据处理 工作。
2.3 精度评估
(1)比对板验证:为进一步验证NORBIT iWBMS多波束测深系统的绝对测深精度,在现场测区水域内进行多次比对板测试。将比对板吊放在多波束换能器下方,调节吊放深度,在不同深度点处进行比测,结果显示:1 min连续观测深度值变化在±5 cm范围内,说明NORBIT iWBMS多波束测深系统具有很好的稳定性,测量精度可靠。
(2)内符合精度:与相邻测线的现场测量数据进行比较,符合度在10 cm以内,表明设备具有非常高的测量内符合精度。
(3)与单波束测量结果比对:将单波束检查线测量的水深数据与NORBIT iWBMS多波束测深系统主测线水深数据进行比较,统计检查点数共162个。深度比对互差在±10 cm以内占比为85.8%,在±20 cm以内占比为10.5%,在±30 cm以内占比为3.7%。经数据分布情况核验,河道中间较平坦水域深度比对互差在10 cm以内,深度比对互差在20~30 cm的情况主要出现在河道边坡处或水深变化大的斜坡处,符合JTS 131 2012《水运工程测量规范》对测深深度比对互差(水深≤20 m,互差≤0.4 m)的要求。
2.4 数据成果展示
通过合理布设测线,严格控制作业过程,科学处理数据,圆满完成测量任务。NORBIT iWBMS多波束测深系统测量优点在于测点密集、分辨率高、覆盖范围广,能够更加精准地测出水下目标物,弥补单波束测量无法做到全覆盖、无遗漏的技术缺陷;根据测量数据进行三维模拟时,可通过软件在区域内任意位置截取剖面生成断面图,并直观呈现水下三维图(见图2),能够展示更细致、更全面、更准确的模拟现状。
此外,根据实测资料初步确定测量区域内存在5条沉船(见图3),通过对NORBIT iWBMS多波束测深系统采集的各项数据进行分析研究,可以准确得到沉船的数量、位置、长度、宽度等数据。

图2 水下断面设置及水下三维图

图3 水下沉船三维分布图
3 应用价值
(1)安全保障方面。测量区域为通航航道,传统的单波束测量技术往往需要垂直于河道中心线进行走航作业,与正常船舶通航交叉作业时,存在碍航碰撞的安全风险,利用NORBIT iWBMS多波束测深系统测量可以避免该风险,在安全保障方面起到重要作用。
(2)质量控制方面。与传统单波束测量相比,NORBIT iWBMS多波束测深系统可以更好地进行水下面域测量。较高的覆盖深度及覆盖面域使其能够实现水下地形的准确监控,更加适合开展涉河相关工序的监测,有效管控成果质量。
(3)经济效益方面。通过成果展示, NORBIT iWBMS多波束测深系统使用便捷、高效,覆盖范围广,能够在浅水区域更直观地反映地形地貌特征,精确测量水下目标物的形状、大小和高低变化,减少测量成本,提高工作效率。
4 结 语
NORBIT iWBMS多波束测深系统在宁波市三江河道监测中的应用,科学、真实地反映测区河床的水下三维一体化现状,为相关河道冲刷研究、涉河监管等工作提供可靠依据。NORBIT iWBMS多波束测深系统在河道监测方面的应用日趋成熟,测量高效性、测量数据的准确性及高密度性使其具有广阔的应用前景。
