室内电力巡检机器人的设计与实现
2021-06-09南方电网超高压输电公司天生桥局姚传涛褚海洋陈田济凡莫云晓王学埕
南方电网超高压输电公司天生桥局 姚传涛 褚海洋 王 坤 陈田济凡 莫云晓 王学埕
2020年全国共发生电力人身伤亡事故36起,死亡45人。如能广泛应用室内巡检机器人,
这一数值可能会大大降低。目前用电量增加了许多,相对变电站的巡检要求也随之提高,从而大大提高了对室内电力巡检机器人的需求程度。
1 需求分析
自2010年以后,我国涌现了诸多研究机构和厂家开展了巡检机器人的相关研究工作,并在多个变电站完成了试运行[1]。本文所设计的机器人主要核心将集中在明确所在位置、下一步工作是什么,以及怎样去那里完成巡检任务。所以要求所设计的机器人应拥有以下功能:能以较快速度准时驶向既定的巡检任务地点;在行驶过程中能智能回避各种障碍物,能做到不碰触高危设备,确保自身的安全性;能安全顺利通过升降门;通过可视化的操作界面能直接设定机器人的巡检任务以及查看其工作状态;能在操作界面远程遥控机器人完成巡检任务,并根据实际需要予以拍照。
2 总体设计
2.1 总体架构
本文所设计的机器人将主要具有以下功能:自动定位所在位置、自动确定导航路径、智能规避障碍物、智能拍照、实时上传巡检信息(图1),最上层是上位机管理系统,主要提供机器人运行状态查看、设置巡检路线、发布巡检任务和拍照对象,以及提供手动遥控机器人的功能。中间层是逻辑核心层,是机器人的中央控制以及业务处理系统,借助传感器与摄像头来探测周边情况。硬件系统主要负责承担机器人的相关运用功能,可以转向以及给定速度行驶。

图1 总体架构示意图
2.2 硬件架构
机器人的硬件将主要由中枢控制器、四轮全向机器人平台、垂直升降云台及传感器系统构成。其中中枢控制器主要负责数据信息的采集和处理,对机器人的运动姿态予以实时监控及控制。同时将机器人的传感器数据信息、运动状态信息等传输至中控机,并对相应的控制指令予以响应;四轮全向机器人平台是机器人的承载平台,将借助4个麦克纳姆轮实现驱动;垂直升降云台在控制器以及直流无刷电机的驱动及控制下,主要负责对机器人的多角度检测;传感器系统主要包括激光雷达、超宽带定位模块等传感器而构成,通过多种传感器的协同配合,共同完成对机器人相关情况的判断。
超声测距。机器人由于将主要在电站的监控室、生产车间等较为复杂的环境下执行巡检任务,所以需实时探测和判断周围环境情况,是否存在障碍物、危险不可碰触高危设备等。避障传感器主要是借助超声探测方案来实现障碍物感知[2],其具有发生和接收超声波的功能,当发出的超声波遇到障碍物后会发反射,接收器在接收到反射信号后将自动将相关距离信息计算出来并提供给机器人。本设计将使用多个传感模块来构成一个传感器阵列,如此就能够对多个单点距离的信息进行综合分析。
电量检测。由于电池在放电过程中伴随电量的减少其带负载输出电压会下降较为明显[3],所以通过数字量化输出电压就能实现对电池剩余电量的成功估计。但考虑到剩余电量与带载输出电压两者间并非线性关系,因此通过这样的方法来估计得到的结果并不一定准确,所以考虑预先对电池负载放电特性加以估计和测定,以便所获得的电池电压值变得更加准确。
升降云台。主要采用分布式控制的方式来控制垂直升降云台的运动。驱动器以及电机都将被配备控制器,在充分考虑成本的情况下对其予以模块化设计。而控制器内部将做到电机的闭环控制,把编码器所反馈的角度信息读取到以后作为反馈信号,从而借此实现对电机控制执行值的计算。其中水平控制单元主要负责水平方向的旋转,而垂直升降单元将主要负责垂直方向的运动。分立的控制单元将作为从设备挂载于中枢控制器的CAN总线,在实现对电机独立控制的同时还可借助中枢控制器将相关协调工作做好。
通信接口。通过总线通信方式主要借助分立的控制器(Controller)来实现对中枢控制器连接的架构,各类传感器(Sensor)也是通过这样一种方式从而挂载于通信端口上。而中枢控制器将主要负责对各类数据的采集,并遵循设定的格式对这些数据加以打包传输。而上位机在收到相关指令信息后也会先将数据解析出来然后加以执行。
系统电源。主要是指两个部分,即中控机电源以及机器人平台电源。其中针对工控机电源将使用独立的锂电池(12V、40Ah)。考虑到该电池存在电压输出不够稳定,将对其借助DC-DC予以升压处理。平台电源能借助平台实现电压的稳定输出,能满足多个供电需求。
2.3 软件系统
软件系统包括中控机和上位机,主要是底盘以上的层级。其中中控机主要负责控制底盘运动、摄像头拍照以及控制云台升降等核心任务,上位机主要负责供用户向机器人发布巡检任务、查看机器人状态及展示运检地图等。
操作系统。为了机器人的各种功能能得以顺利实现,设计中将使用机器人操作系统ROS,这是专门针对机器人而开发出来的一种系统,是一套开源的系统框架,具有通用性、开源性、复用性、社区性等诸多优点,由于具备诸多功能,同时能免费用于商用或研究,因此有利于降低研究开发成本[4]。为使机器人变得更加契合室内电力巡检任务,本研究将对定位和导航模块予以相应修改。本文所设计的机器人将主要使用3个节点(图2),这些节点间将呈耦合分布式,基本能做到同时运行,借助频率较高消息队列来实现消息的彼此传递。
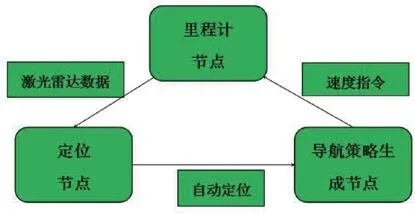
图2 节点关系示意图
定位模块。主要通过对激光雷达(Laser radar)和超宽带(UWB)数据的解析来获得机器人的相关定位信息,但其会优先借助滤波算法(Filtering algorithm)来对UWB的数据予以优化,从而使所获取的定位信息更加精确稳定。还会运用ROS的ACML包对线管数据再次加以计算,从而获得最终的定位信息。该模块既能够对两个定位信息予以单独使用,也可以融合使用。

图3 定位模块示意图

图4 导航模块示意图
导航模块。主要分为手动控制、局部路径规划以及全局路径规划,通过局部、全局两个子模块彼此间的协同配合能实现实时路径规划。但当机器人接收到手动控制命令后,此时机器人的控制权将被工作人员所接管,从而自动切换至手动模式状态,以供工作人员手动规划机器人的巡检路线。
巡检模块。机器人在接收到巡检任务后将自动规划路线开始巡检工作,期间依靠多个传感器来判断水平方向是否存在障碍物或不可触碰高危设备。同时根据巡检任务的实际需要,相关指令能够及时传达至摄像头以及升降云台,从而对其升降高度以及拍摄角度进行相应调整,确保拍摄效果。巡检功能主要还能完成危险情况紧急制动、通过升降门、设备拍照、手动控制等等机器人功能。