基于机载激光雷达点云的雪道坡度提取算法
2021-06-08白莎莎张海洋许世东陈思祺张子龙赵长明
白莎莎,张海洋,许世东,陈思祺,张子龙,赵长明
(1.光电成像技术与系统教育部重点实验室,北京 100081;2.北京理工大学 光电学院,北京 100081)
引言
在2022年冬季奥运会的带动下,结合“三亿人上冰雪”政策带来的历史机遇,我国滑雪场和滑雪运动发展迎来了黄金时期[1],雪场数量和滑雪爱好者数量显著增加,各类冰雪项目层出不穷。但是,现阶段我国大部分雪场设施不够完善[2],选址和场地布局上规划欠佳,缺乏雪场空间环境的高精度参数评估[3]。与此同时,滑雪运动是一项高风险运动,高山滑雪项目中,由于垂直高度差较大,专业选手滑行速度可以超过130 km/h,特别是下降滑雪项目,最高速度可达230 km/h,运动员受伤几率很高。因此,雪场的坡度信息获取工作显得尤为重要。获取雪场的高精度坡度信息,不仅有利于雪场的规划和建设,对于运动员成绩的提高和运动风险的规避也能起到至关重要的作用。
最近几十年,随着无人机操控技术、高精度激光雷达技术的发展以及高性能相机和计算机技术的日益成熟,机载激光雷达技术广泛应用在气象监测[4]、机器人导航和避障[5-10]、三维制图和地形可视化[11-14]、进程环境感知[15-16]、山区水电测绘工程[17]、植被研究[18]、建筑物线提取[19-20]等领域中。但国内关于使用机载激光雷达获取雪场点云数据的相关文献较少,通过雪场点云数据提取雪道信息的文献更是寥寥无几。主要原因是雪对激光独特的反射特性导致固定波长的激光对雪的扫描效果不佳[21]。本文在科技部重点研发计划“科技冬奥”专项的资助下,使用无人机载激光雷达成功获得了高质量的雪场点云数据。但由于雪场范围较大,地形带有坡度起伏,雪场点云数据量庞大,雪道特征不明显,且雪的光学散射特性导致部分点云数据稀疏或缺失,给雪道提取以及雪道中线拟合带来很大的困难。
为了解决上述问题,基于机载激光雷达获取的雪道点云数据的数量及坐标信息,提出了基于机载激光雷达点云的雪道坡度自动提取算法,在降低点云数据稀疏或缺失带来的不利影响的同时,提高雪道坡度提取的效率和精度。经过理论分析和实验测试,证明了该方法在雪道坡度自动计算应用中的可行性。其中,该方案涉及到的处理流程对雪场点云数据处理的相关研究具有一定的参考意义。
1 理论模型
本文提出的雪道坡度自动计算方法流程如图1所示。由于雪道点云数据无明显特征,无法直接提取出雪道数据,可将雪道边缘标志物(如防护网、道标、彩旗等)作为特征提取的边缘点。通过基于投影高程差的滤波算法将雪场点云中的地物点进行分离;采用基于区域生长的聚类分割算法对非地面点进行聚类分割,提取出边缘标志物;对边缘标志物数据经投影及近邻域搜索获取雪道边缘点;通过提出的自适应阈值拟合算法对雪道中线进行拟合;经近邻域搜索获取雪道实际中线,并自动计算雪道坡度。
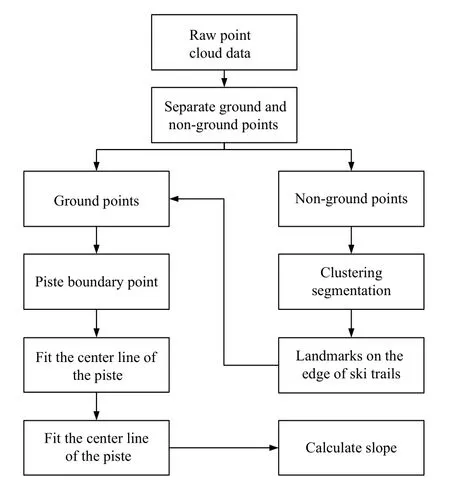
图1 整体方案流程图Fig.1 Flow chart of overall scheme
传统的分离地面点方式大部分使用直通滤波器(z=z0),但由于滑雪场具有一定的坡度,如果采用直通滤波,需要分段设置z0大小,效率较低,且雪场范围较大又具有一定坡度起伏,采用智能滤波算法会牺牲滤波精度,对后续坡度计算的误差有很大影响。在雪场点云地物点分离的应用上,本文提出了使用基于投影高程差的滤波方法分离雪场地物点。具体实现原理如下:
首先,通过(1)式将雪场点云数据投影至XOY平面:

建立kd-tree结构,对XOY平面内的任意一点i=(x0,y0),以点i为圆心、r0为半径进行邻域搜索,设搜索到的邻域点集为P,P中的点对应到三维雪场点云数据中的点集为Q,则非地面点Qi应满足下式:

式中:ΔZi为 高程差;ZQmin为邻域Q中的最小Z值;ε为阈值。若 ΔZi<ε,则认为点Qi为地面点,否则认为点Qi为非地面点。遍历所有点,即可完成地物点分离。
获取的非地面点中包含雪道边缘标志物、树木、滑雪者等,边缘标志物通常可选定为防护网、道标、彩旗等。本文以防护网为例,采用基于区域生长的聚类分割算法[22],提取防护网,将得到的三维防护网点云数据投影至XOY平面后进行邻域搜索,判定邻域点中z坐标最小的点为地面雪道边缘点。
由于雪道的表面并不平整,选取雪道中线作为雪道坡度提取的基准。但在实际应用过程中,激光雷达扫描雪场时获取到的点云数据并非均匀分布,即雪道两侧边缘点云数据会存在部分稀疏或缺失的情况,无法使用基本的均值算法。本文提出了一种自适应阈值的拟合算法对雪道中线进行拟合,该算法的数学表达如下:
1)对雪道边缘点云在雪道方向上进行分段。对第j段,设段内点云数据集为Pj={p1,p2,···,pn},计算其质心为

2)以质心Gj为阈值分割点云Pj,设有k个点满足pi≤Gj,i=1,2,···,k,则有n−k个点满足pi>Gj,i=k+1,k+2,···,n,计算被分割的2个点集的质心:

该算法的操作步骤如图2所示。
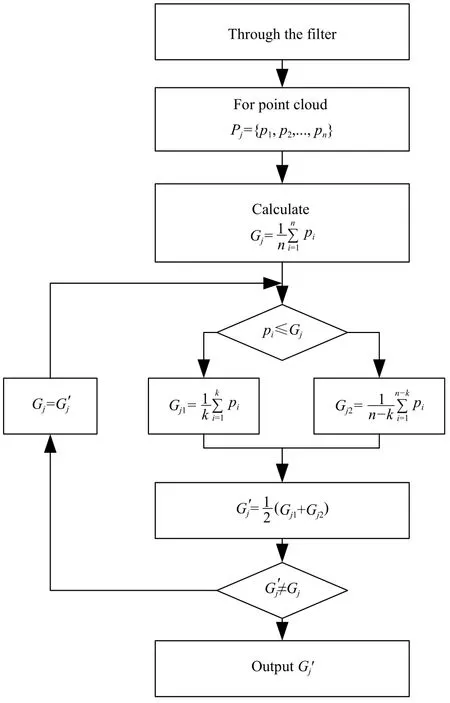
图2 自适应阈值的拟合算法Fig.2 Adaptive threshold fitting algorithm
上述算法计算所得雪道中线为拟合中线,并不存在于原点云模型中,因此,对拟合中线上每一点进行一次最近邻搜索,搜索到的原点云模型中的最近点即为实际存在的中线点。
在坡度计算时,为减少随机误差的影响,采用逐差法进行坡度计算。选取1 m内的N个点,设第1个点为A1(x1,y1,z1),则第个点为A2(x2,y2,z2),采用下式进行坡度的估计计算:

2 实验结果与分析
本文实验数据测试地点及所用设备如表1所示,经激光雷达采集到的部分雪场点云数据如图3所示。算法实现上,以Microsoft Visual Studio 2019 Pro为程序开发平台,使用点云库(point cloud library, PCL)完成算法设计。

表1 实验数据测试地点及所用设备Table 1 Experimental data test site and equipment used

图3 激光雷达获取的雪场点云数据Fig.3 Data of ski resort point cloud obtained by LIDAR
首先,对实验获得的雪场点云数据进行地物点分离。分离效果如图4所示,保留下的非地面点中包含防护网、树木以及滑雪运动者。基于投影高程差的滤波方法在提取雪场点云非地面点的应用上,提取结果准确、完整度高、地面点噪声较少。
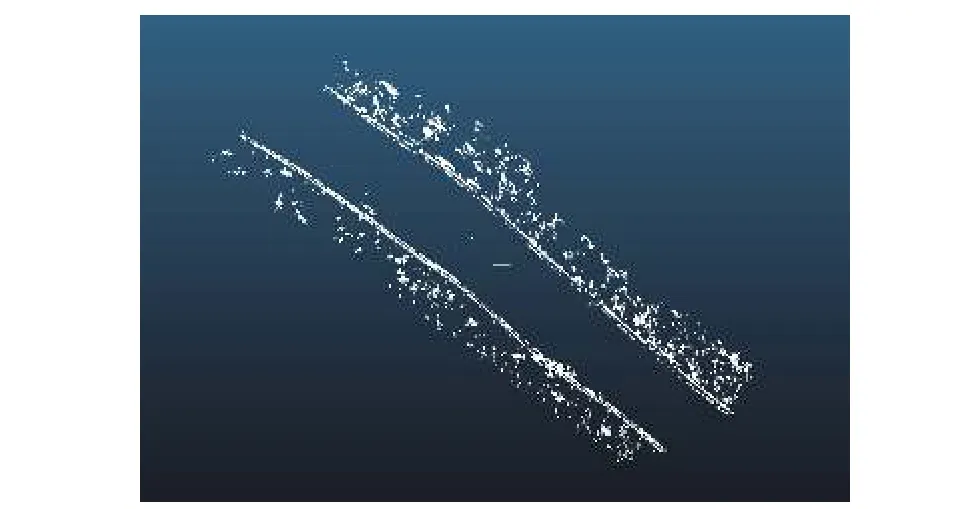
图4 经投影高程差滤波后的非地面点Fig.4 Non-ground points filtered by projection difference of elevation
对雪场点云数据地物点进行分离后,选取非地面点作为后续处理数据。在算法参数的设置上,由于雪场地形复杂,地面物体的形状、体量以及光学特性存在巨大差异,无法设置统一阈值兼顾所有情形,否则会导致错误分类。因此,参数的选择需要根据具体的任务进行分析和设置。但参数设置并非无规律可循,可遵循表2的参数设置规则,其可能产生的误差也如表2所示。

表2 算法参数设置规则及可能产生的误差Table 2 Algorithm parameter setting rules and possible errors
本文设置k邻域半径为0.03,对非地面点进行法线估计,使用基于区域生长的聚类分割算法进行聚类分割,提取出防护网模型,用以确定雪道边界。设置最小聚类点数为1 800、最大聚类点数20 000、搜索邻域点个数45、法线差阈值为8,防护网提取效果见图5所示。
由图5可知,采用基于区域生长的聚类分割算法可在实际应用中完成雪道边缘标志物的提取,提取结果边缘清晰连续,完整度和准确度较高,噪点较少,可用于后续中线拟合。

图5 防护网提取效果图Fig.5 Extraction effect diagram of protective screening
将提取获得的防护网模型投影至二维平面,经邻域搜索获得实际雪道边缘点,采用自适应阈值的拟合算法进行雪道中线拟合,再经邻域搜索获取雪道实际中线点,效果图如图6所示。
参照上述流程,另选两组点云数据进行处理,拟合效果如图7所示。
由图6和图7可知,采用自适应阈值的拟合算法拟合出的雪道中线完整清晰、连续性好、无偏离点。拟合效果表明,自适应阈值的拟合算法可以解决实际应用中雪道边缘数据分布不均,部分数据稀疏或缺失的问题,中线拟合精度较高。
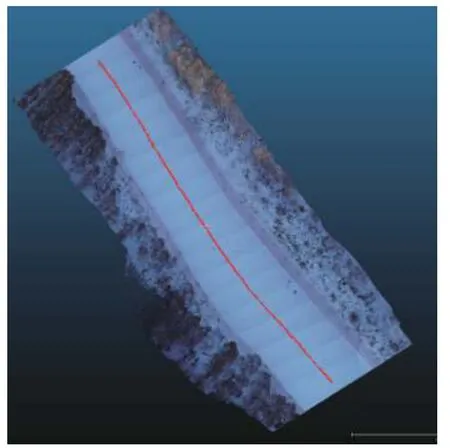
图6 雪道中线拟合效果Fig.6 Fitting effect of ski tracks center line
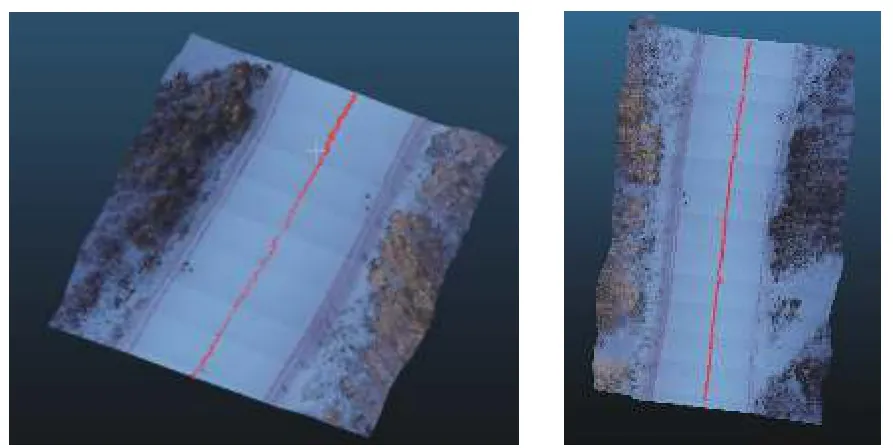
图7 雪道中线拟合效果Fig.7 Fitting effect of ski tracks center line
由中线点计算雪道坡度数据,并计算本文提出的自动提取算法与多次手动测量平均坡度值之间的坡度相对误差为2.2%,误差波动区间为[−2.5°−0.7°]。由于数据较多,仅展示部分数据如表3所示。

表3 部分坡度数据展示Table 3 Partial slope data
作自动计算坡度值与手动测量值对比如图8所示。
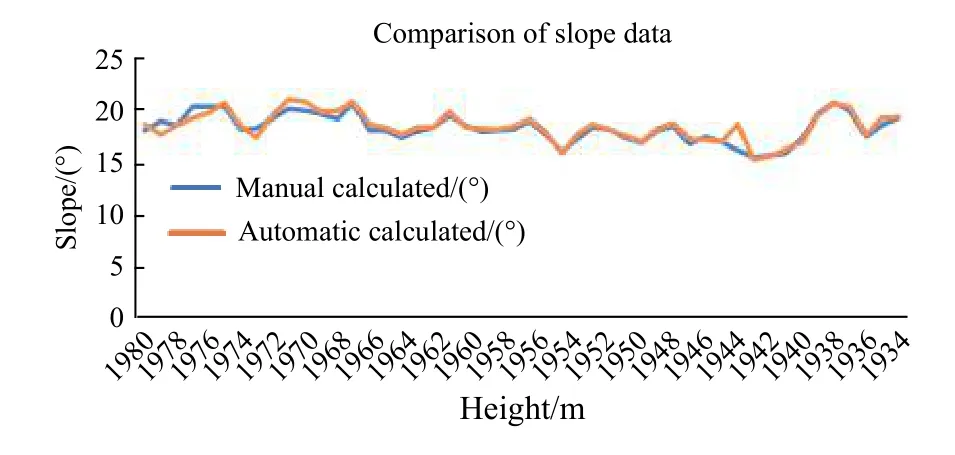
图8 自动计算与手动测量坡度值对比图Fig.8 Comparison curves between automatic calculation and manual measurement of slope values
根据图8及表3数据可知,误差产生的主要原因是:1)Rigel miniVUX-1DL的精度/重复精度为15 mm/10 mm,Applanix APX-15的位置误差为2 cm~5 cm,获取雪场点云数据时会存在测量误差;2)手动测量数据为多次测量结果的平均值,但测量者选取的点具有主观性,仍会引入系统测量误差。
综上所述,相较于传统的手动测量方式,本文提出的方法可实现大量数据的自动计算,在保证准确度的同时,可大大节省时间以及人力物力,具有实际应用价值。
3 结论
本文提出了一种高效的雪道坡度计算方法,设计了一种基于机载激光雷达点云数据的雪道坡度自动提取算法,在雪道中线拟合部分提出了一种自适应阈值的拟合算法,该方法可根据点云数量信息及坐标信息自动计算阈值,解决了实际应用中部分雪道边缘点云数据稀疏或缺失的问题。实验结果证明本文提出的雪道坡度自动提取算法具有较高的准确度和完整度,可以应用于大范围雪场目标的雪道坡度计算中。
