基于主频预估的短波发射机功率自适应控制方法
2021-06-07张永凯
张永凯
(国家广播电视总局二〇二二台,新疆 喀什 844000)
0 引 言
短波发射机是兴起在20世纪80年代的一种脉冲调制发射机,以其高效且灵活的特点被广泛应用到各个领域。在短波发射机播音时长不断增加的背景下,其播音频率范围也在随之扩大。受全球气温变化影响,其工作环境也受到影响[1]。冬季和夏季的极端天气会减少短波发射机的使用寿命,发射机内的蒸发冷却设备和水循环设备都会造成短波发射机的运行困难。主频预估指的是评估和预测CPU内核工作的时钟频率,主要用于衡量机器的运行速度等影响因素[2]。自适应控制方法最初是为了解决飞机自动驾驶仪的参数不稳定问题,在后续发展过程中逐渐应用到其他领域。国外开展短波发射机功率自适应控制方法的研究较早,研究重点主要集中在输入载波功率及音频调制功率层面,将数字化的直流信号作为衡量功率大小的主要标准。国内的相关研究成果主要集中在短波发射机的功率故障处理方面,针对的是在运行过程中出现的一系列损耗问题[3]。目前,学术界关于将主频预估和短波发射机功率自适应控制方法相结合的资料并不是十分全面,需要进一步深入探讨。
1 基于主频预估的短波发射机功率自适应控制方法
1.1 调整短波发射机功率不平衡结构
短波发射机在正常状态下的阻抗变换作用并不是十分明显,导致发射机功率的分布指标较小,需要切换短波发射机的不平衡结构。根据短波发射机的运行需要,在平衡馈线之间进行阻抗匹配[4]。由于短波发射机内的转换器量感较小,无法截获所有的屏蔽体,必须要得出屏蔽体的实际长度与波长才能避免短波发射机的负载抗电性[5]。借助终端的真空电容器,实时补偿发射机功率的电抗。一般情况下,短波发射机的装备会有3~10个不等的标准频带,每个频带中包含80个预设值,并在4.8~23.4 MHz的频率范围内合理分布。包括电动机定位和开关元器件定位等信息在内的影响因素,都需要将固化值与预设值进行匹配[6]。调谐数据是判定机械元件操作性能的重要依据,需要实时监控其调谐状态,自动修正错误数据[7]。基于上述描述,实现调整短波发射机功率不平衡结构的目的。
1.2 基于主频预估建立机体坐标系
根据短波发射机的非线性特征,基于主频评估建立机体坐标系。在位置信息中,短波发射机的相对位置是坐标系建立的基础信息,结合短波发射机的姿态角、速度以及方向等数据,建立相应的机体坐标系[8]。短波发射机的功率大小同样会影响其主频评估结果,在既定的功率区间内选择出合适的定位数据。在惯性空间中,先确定两个坐标轴的水平和垂直方向,并将短波发射机的重心作为原点,确定其姿态角的取值范围[9]。短波发射机姿态角的结构如图1所示。

图1 短波发射机姿态角结构
由图1可知,短波发射机的姿态角结构与平面上的投影有关,机体的运动方向会直接改变其姿态角结构。设定短波发射机地球坐标系与机体坐标系的原点位置是重合状态,利用主频预估结果,设定电路中的电容电感指标,保证各个元器件之间有并联谐振关系[10]。在输出足够信号的同时,实现机体坐标系建立的目的,基于此完成机体坐标系建立步骤。
1.3 构建动力学模型
在多目标优化的基础上不断调整输出功率与降压数值之间的关系,求得最优解集,构建动力学模型。在构建动力学模型的过程中需要考虑机器开、关两种不同状态下可用电容与电感的参数变化,并确定驱动电路的输出状态。为了满足动力学模型的需求,合理调整安装的谐波滤波器。考虑到电谐波的参数问题,必须将谐波的残波数值控制在30~50 mW,否则会影响建模效果。选择短波发射机的相应信道,并不断调整反射功率的数值,使反射功率保持在最小区间内。
1.4 利用遗传算法设置自适应控制模式
利用遗传算法设置自适应控制模式是设计控制方法的重要环节。结合遗传算法候选解适应度较高的特点,不断优化搜索目标。在计算最大值和最小值的过程中,将驱动马达向正方向和负方向同时移动5个区间,确保在运行过程中能够快速找到谐振点,实现参数调节的目的。提取出短波发射机功率的历史数据,根据数据分布特征重新排列并调整布局结构。为了使短波发射机能够输出较大信号,需要在数据处理的基础上读取A/D卡的表值信息,对各个组件都实行精准控制。基于上述描述,完成利用遗传算法自适应控制模式步骤。
2 仿真实验
2.1 搭建实验环境
实验配置及参数如表1所示。
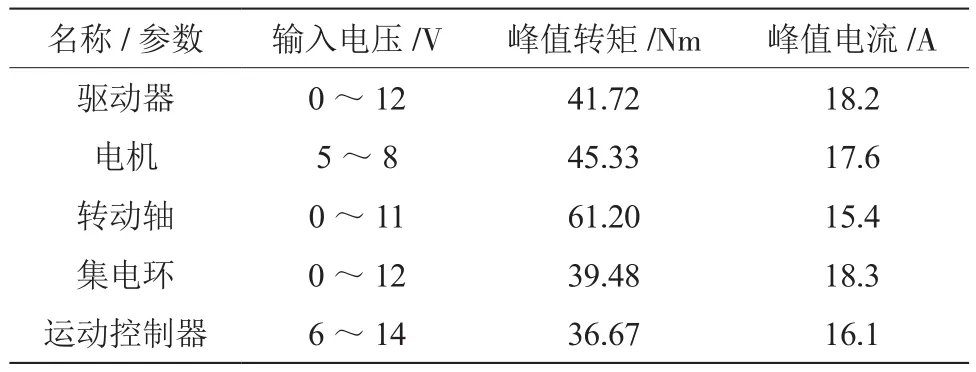
表1 实验配置及参数
基于上述实验配置及参数,进行实验测试,并得出实验结果。
2.2 实验结果
实验选取3种现有控制方法,与此次设计的控制方法进行实验对比。在静态误差为80 m的条件下,测试4种方法的收敛速度,速度越快,证明控制方法的实际应用性能越好。实验结果如表2所示。

表2 实验结果
由表2可知,现有方法1的收敛速度最高为94.315 2 m/s,现有方法2的收敛速度最高为94.008 7 m/s,现有方法3的收敛速度最高为94.225 8 m/s,设计方法的收敛速度最高为77.564 1 m/s,证明此次设计的自适应控制方法性能更佳。
3 结 论
此次设计的自适应控制方法经过实验测试证明具有良好的实用性能,在一定程度上推动了整个短波发射机领域的研究进展,同时为学术界开展相关自适应控制方法的研究奠定了理论基础与实践基础。