改进的熵特征在行星齿轮裂纹故障识别中的应用
2021-06-04吴守军陈健冯辅周周超极吴春志卫恒
吴守军,陈健,冯辅周,周超极,吴春志,卫恒
(1.陆军装甲兵学院车辆工程系,100072,北京;2.中国人民解放军63963部队,100072,北京;3.陕西师范大学体育学院,710119,西安;4.军事科学院系统工程研究院,100141,北京;5.中国人民解放军32021部队,100094,北京)
由于工作环境恶劣,坦克行星变速箱中的齿轮极易出现裂纹等故障,因此裂纹故障的准确有效识别对于及时开展维修工作具有重要指导意义。齿轮产生故障后,引起振动信号熵值发生变化,因此信息熵特征在行星齿轮故障识别中得到广泛应用[1-2]。
杨大为等、任国春等利用VMD样本熵、EEMD样本熵实现了行星齿轮裂纹故障识别[3-4];王振亚等、黄大荣等利用多尺度样本熵实现了轴承故障识别[5-6];丁闯等利用LMD分量排列熵、改进多尺度符号动力学信息熵等实现了行星变速箱太阳轮、行星轮裂纹的故障识别[7-8];王志坚等利用排列熵优化VMD参数实现了齿轮箱故障诊断[9];李永健等和戚晓利等利用多尺度排列熵特征实现了轴承、行星齿轮的故障模式识别[10-11];郑近德等利用多变量多尺度模糊熵实现了行星齿轮故障诊断[12]。然而,上述方法样本熵计算效率低,排列熵未考虑信号幅值细节变化。对此,Rostaghi等和Azami等提出了利用散布熵(DE)和精细复合多尺度散布熵(RCMDE)特征评价非线性信号复杂度,该特征算法简单、计算效率高[13-14];李从志等将RCMDE用于轴承故障特征提取[15];乔新勇等提出VMD多尺度散布熵实现了柴油机故障识别[16];付文龙等利用VMD分量散布熵与改进灰狼优化支持向量数据描述结合实现了轴承故障识别[17];张依东提出多尺度融合离散熵,提高了特征的稳定性和准确性[18]。
然而,RCMDE特征依然存在噪声鲁棒性不强、尺度选择效率低等不足,对此,本文提出自适应精细复合多尺度散布熵(ARCMDE),首先采用VMD对信号进行降噪预处理,并提出特征重合度指标对尺度进行优劣排序,提高尺度选择效率,最后通过行星变速箱实验数据对所提特征进行验证。
1 精细复合多尺度散布熵
RCMDE是基于DE、MDE等特征逐步优化提出的多尺度熵特征,接下来介绍散布熵、多尺度散布熵、精细复合多尺度散布熵原理,并给出相关参数取值原则。
1.1 多尺度散布熵
DE是一种衡量时间序列复杂性或不规则程度的指标,该指标具有计算效率高、考虑数据幅值细节变化等优点,对于给定的时间序列x=[x1,x2,…,xN],DE计算步骤如下。
(1)利用式(1)的正态分布函数将时间序列x映射到y=[y1,y2,…,yN],yi∈(0,1)
(1)
式中:μ和σ2分别为时间序列的期望和方差。
(2)通过以下线性变换将y映射到[1,2,…,c]的范围内
(2)
式中:j=1,2,…,N;round(·)为四舍五入取整函数;c为级别数量。
(3)计算嵌入向量
(3)
式中:m、d分别为嵌入维数和时延;i=1,2,…,N-(m-1)d。

(5)计算每种散布模式πv0,…,vn-1的概率p(πv0,…,vm-1)
(4)

(6)根据信息熵的定义,信号x的DE定义为
DE(x,m,c,d)=
(5)
将长度为L的序列u=[u1,u2,…,uL]不重叠地等分成长度为τ(尺度因子)的多段序列,计算每段序列的平均值
(6)

将各段平均值组合成长度为N的粗粒化序列,再计算每个粗粒化序列的散布熵,即为多尺度散布熵(MDE)。由于在计算每个粗粒化序列散布熵时,正态分布函数仍然采用原始信号的均值和方差,因此MDE不是粗粒化序列散布熵的简单组合。
1.2 精细复合多尺度散布熵与参数确定
RCMDE是在MDE的基础上提出的,当尺度因子为τ时,产生τ个粗粒化序列,每个粗粒化序列的起点依次为[1,2,…,τ],序列u的第k个粗粒化序列为
(7)
(8)
式中:1≤j≤N;1≤k≤τ。
对每个尺度因子,RCMDE定义如下
RCMDE(x,m,c,d,τ)=
(9)
(10)

2 ARCMDE特征提取与故障识别
针对RCMDE特征受到信号噪声干扰严重的问题,变分模态分解(VMD)[19]通过对振动信号进行自适应分解得到预设数量的固有模态函数(IMF),选取与原始信号互信息值较大的IMF重构信号可以实现降噪。该方法比经验模态分解具有更好的噪声鲁棒性,但需要预先确定IMF个数,本文利用中心频率统计法[20]确定VMD分解的IMF个数。
RCMDE特征向量构建时,需要选择故障状态区分度较好的尺度,目前主要通过人工观察各故障状态振动信号的特征值均值标准差进行尺度选择,主观性较强、选择效率低下。本文提出特征重合度指标F,用以对某个尺度下各故障状态区分效果进行评价。F表示两种故障状态所有样本的均值、标准差重叠交叉的程度,正值表示没有重叠,负值表示存在交叉,值越大,区分效果越好,反之,则越差。首先将各个尺度下不同故障状态所有样本的特征值均值从大到小排序,特征重合度F的计算公式为
(11)
式中:Nc为故障状态数减1;i为从大到小排序后第i个故障状态;Mi为第i个状态所有样本特征值的平均值;Si为第i个状态所有样本特征值的标准差。
为了直观理解特征重合度指标的含义,两种状态的特征重合度示意图如图1所示。
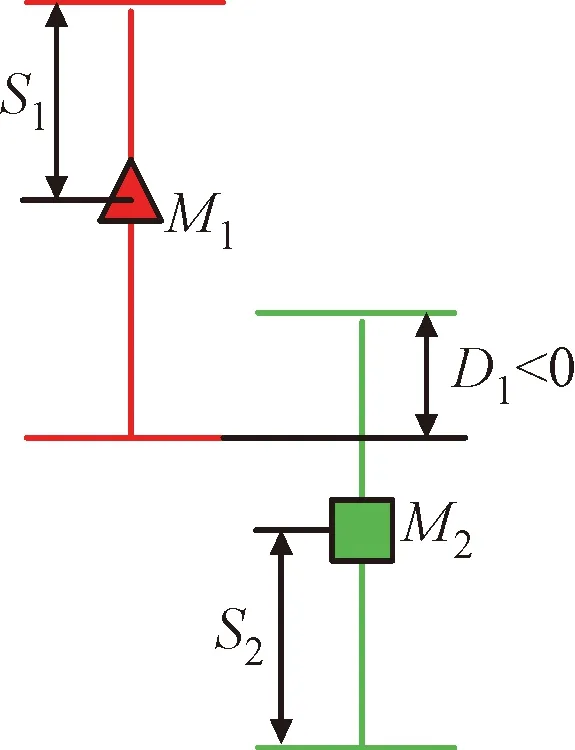
图1 特征重合度示意图Fig.1 Schematic diagram of feature coincidence degree
自适应精细复合多尺度散布熵(ARCMDE)特征提取的具体流程如图2所示。
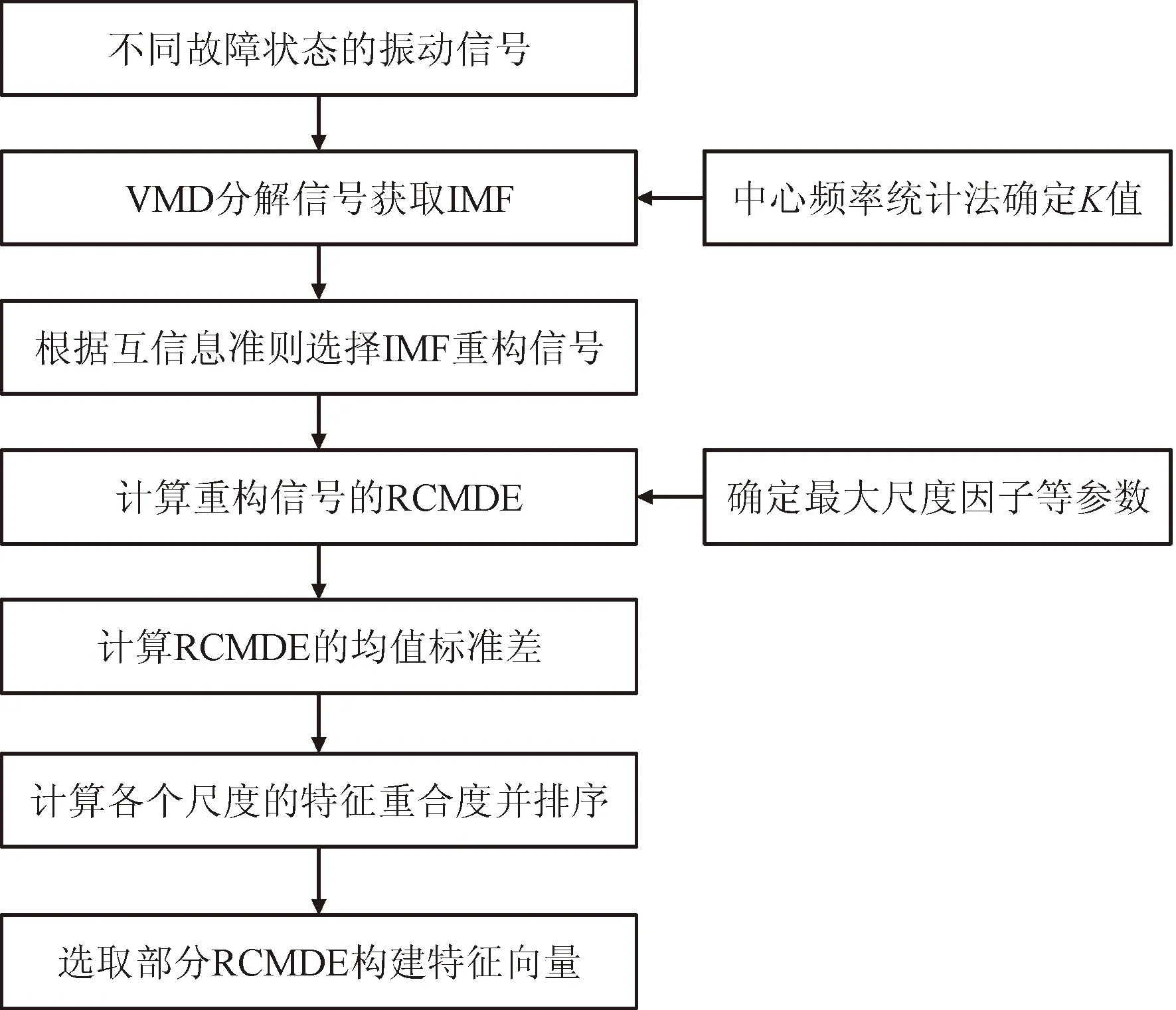
图2 ARCMDE特征提取流程Fig.2 ARCMDE feature extraction process
将所有尺度下的重合度从大到小排序,选择前5个尺度的ARCMDE特征构建特征向量,分为训练集和测试集,首先将训练集输入PSO-SVM训练分类器,然后将测试集输入训练后的分类器,实现故障模式识别,详细流程如图3所示。

图3 故障模式识别流程Fig.3 Fault pattern recognition process
3 行星变速箱实验数据验证
利用行星变速箱的故障模拟实验数据验证ARCMDE特征的有效性,行星变速箱故障模拟实验台如图4所示,主要由行星变速箱、电机、液压站、数据采集仪、振动传感器和控制台等组成。以变速箱的K3行星排为研究对象,K3排各个齿轮的详细参数如表1所示。通过线切割方式加工5种齿轮故障件:太阳轮裂纹、太阳轮断齿、行星轮裂纹(太阳轮侧)、行星轮裂纹(齿圈侧)和行星轮断齿,5种齿轮故障件如图5所示。故障尺寸如下:太阳轮、行星轮裂纹整个齿宽,太阳轮裂纹深度为5 mm、行星轮裂纹深度为4 mm;太阳轮断齿是从齿根圆处切除一个齿,行星轮断齿是沿着齿顶至对面的齿根切除半个齿。

表1 K3行星排齿轮参数Table 1 K3 planetary gear parameters
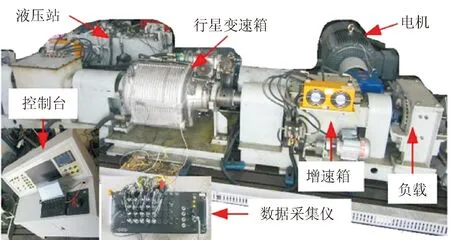
图4 行星变速箱故障模拟实验台Fig.4 Planetary gearbox failure simulation test bench

图5 5种齿轮故障件Fig.5 Five kinds of gear failure parts
实验工况设置:挡位选择Ⅳ挡、输入转速为600 r/min,空载。振动测点位于K3行星排上方,采用DYTRAN压电式振动加速度传感器,型号为3215M1,灵敏度为1 mV/(m·s-2),量程为5 000 m/s2;利用东华测试公司的DH5902坚固型数据采集系统采集振动加速度信号,采样频率为20 kHz,每个状态采集3组数据,每组数据的采样时间为30 s。
对正常状态实验数据进行VMD分解时,需要预先确定分解层数,根据CFSA法得到中心频率直方图如图6所示。由图6可见,平均频次为4.5,有6个中心频率的频次大于4.5,因此确定分解层数为6。横坐标中心频率编号对应的频率值如表2所示。确定6种状态振动信号对应的分解层数K均为6,分解信号得到6个IMF,分别计算每种状态振动信号与其IMF的归一化互信息,结果如表3所示。6种状态的互信息平均值分别为:0.53、0.30、0.36、0.34、0.34、0.42,选择归一化互信息值大于均值的IMF重构信号。

图6 正常状态信号的中心频率直方图Fig.6 Center frequency histogram of normal state signal

表2 中心频率编号与频率值Table 2 Center frequency number and frequency value
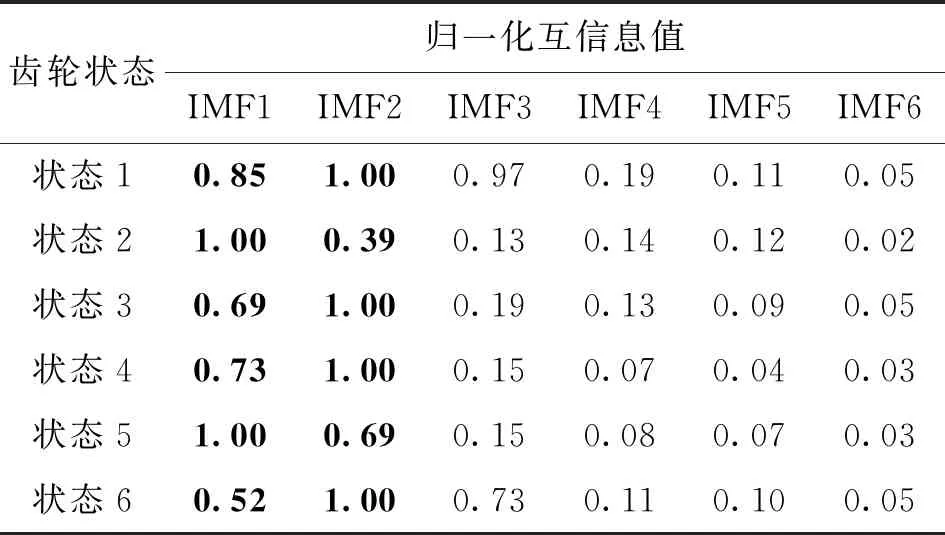
表3 齿轮状态与其IMF的归一化互信息Table 3 Normalized mutual information between vibration signal and IMF
每种状态取40组样本,训练集和测试集均为20组,每个样本长度为5 000点,RCMDE特征计算时参数设置为:嵌入维数m=3,等级数量c=6,时延d=1,最大尺度因子τmax=15。
为验证ARCMDE特征的有效性及优势,与RCMDE、MDE进行比较。根据所提特征提取和故障模式识别流程,得到15个尺度下实验信号的3种特征值的均值标准差分别如图7~图9所示。

图7 实验信号的ARCMDE特征值均值标准差 Fig.7 Mean standard deviation of ARCMDE features of experimental signal

图8 实验信号的RCMDE特征值均值标准差 Fig.8 Mean standard deviation of RCMDE features of experimental signal
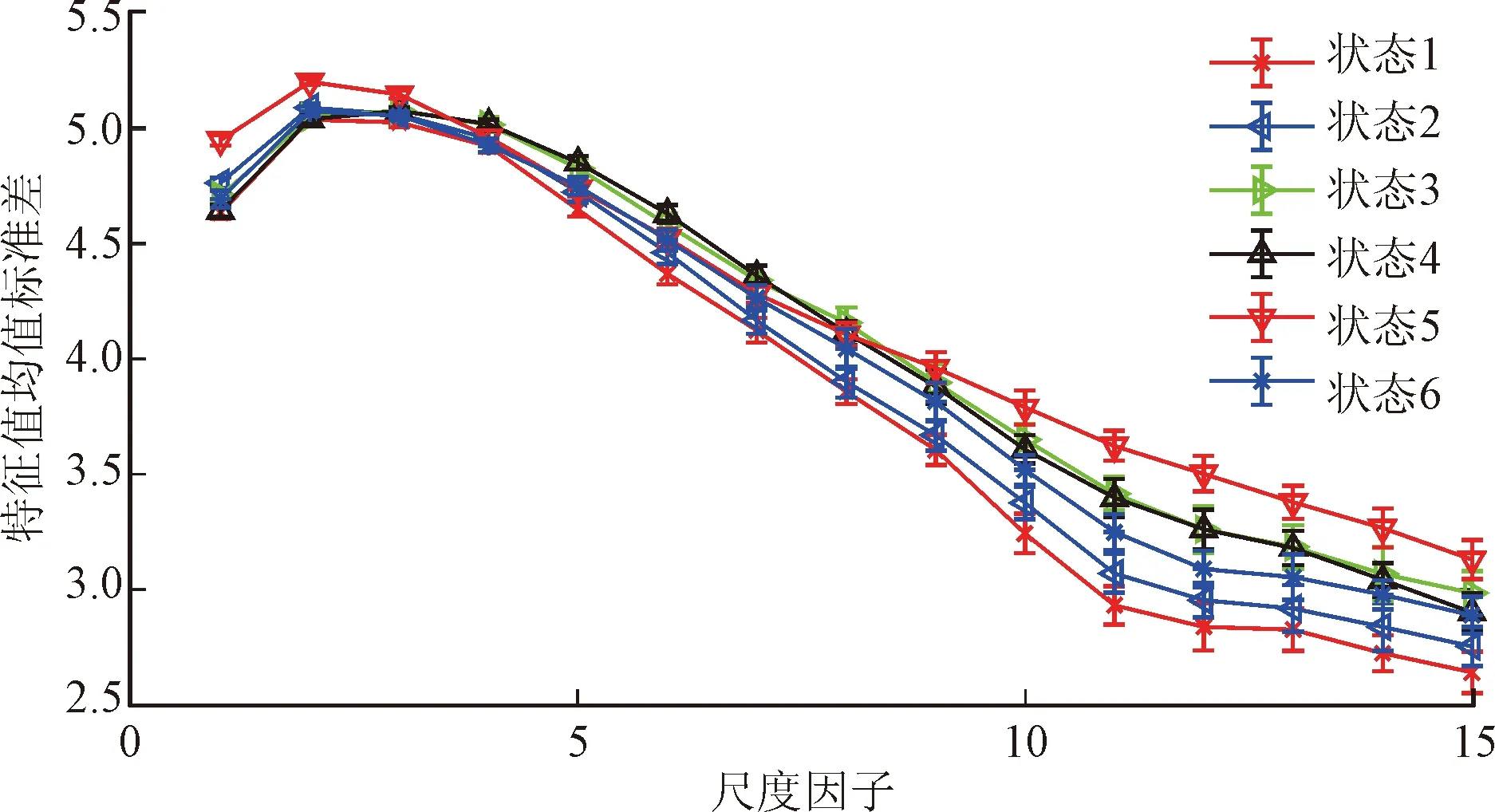
图9 实验信号的MDE特征值均值标准差 Fig.9 Mean standard deviation of MDE features of experimental signal
3种特征在不同尺度的特征重合度及排序如表表4所示。选择重合度较高的5个尺度的特征值构建特征向量,输入到PSO-SVM分类器,3种特征的分类结果如图10~图12所示,分类准确率分别为100%、80%、75.8%。

表4 3种散布熵在不同尺度下的特征重合度及排序Table 4 Coincidence degree and rank of three hinds of entropy under different scales
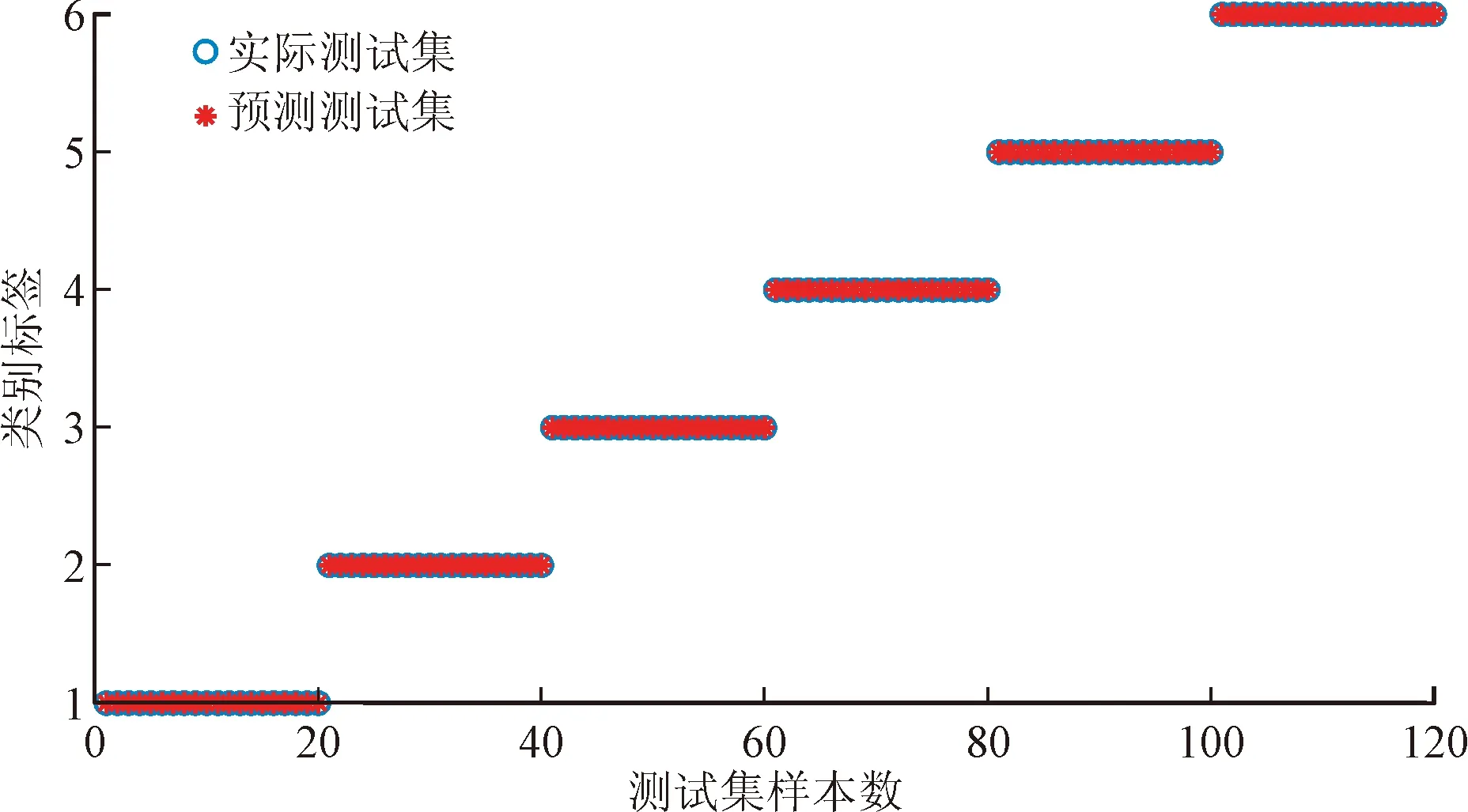
图10 实验信号ARCMDE特征的分类结果 Fig.10 Classification results of ARCMDE features of experimental signals
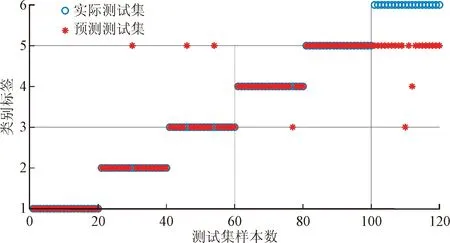
图11 实验信号RCMDE特征的分类结果 Fig.11 Classification results of RCMDE features of experimental signals
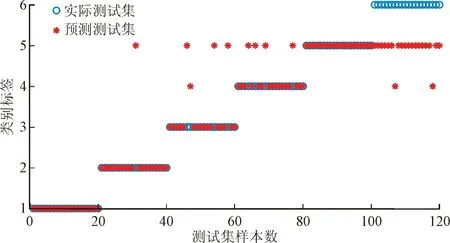
图12 实验信号MDE特征的分类结果Fig.12 Classification results of MDE features of test signals
对比MDE和RCMDE的均值标准差图可知,二者的均值标准差随尺度因子的变化趋势相似,但RCMDE标准差小于MDE,可能是其分类准确率提高的主要原因。利用MATLAB自带的“运行并计时”模块得到主要函数及特征的计算时间。由于MDE特征仅考虑了一个粗粒化序列,而RCMDE考虑了多个粗粒化序列,因此其计算时间会成倍增加。
行星变速箱实验信号的故障模式识别结果如表5所示。由表5可知,与RCMDE相比,ARCMDE特征得到的分类准确率明显提升,达到100%。虽然ARCMDE的计算时间有所增加,在实际开展故障诊断时,利用RCMDE特征构建特征向量时需要人工选择尺度,其所耗费的时间没有考虑,因此,综合来看,ARCMDE的时间成本并不会明显增加,但其准确率得到明显提升。
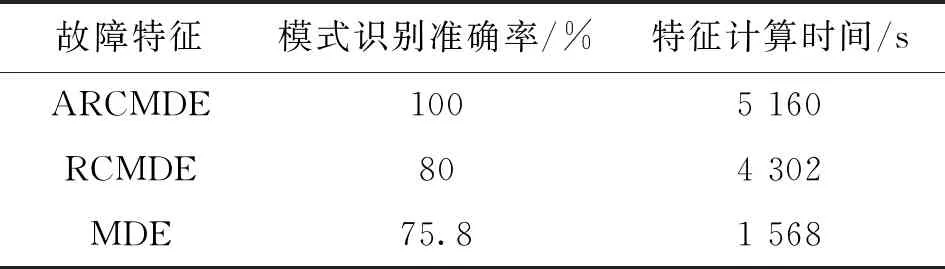
表5 行星变速箱实验信号的故障模式识别结果Table 5 Fault pattern recognition results of planetary gearbox experimental signals
4 结 论
针对RCMDE特征的不足,提出改进特征ARCMDE,通过行星变速箱实验数据验证了所提特征的有效性和优势。首先利用CFSA方法确定VMD分量个数为6,信号分解得到6个IMF,根据互信息准则选择状态1、状态6的前3个IMF和状态2~状态5的前2个IMF重构信号,实现降噪。提出了特征重合度指标对特征值的15个尺度进行优劣排序,选择ARCMDE特征前5个尺度(15、14、13、12、11)构建特征向量,输入PSO-SVM,故障诊断准确率达到100%。MDE前5个尺度(1、2、3、7、4)、RCMDE前5个尺度(13、12、1、14、8)输入PSO-SVM,故障诊断准确率分别为75.8%、80%。由此可知,本文所提特征的故障诊断准确率明显提升。由于增加了VMD预处理,本文ARCMDE故障识别方法的计算时间比RCMDE方法的计算时间(未考虑RCMDE特征人工选择尺度耗时)虽然增加了19.9%,但准确率提高了20%,特定条件下牺牲一定的时间成本提高准确率也是值得的。
