远程遥控泊车辅助系统功能安全整车级测试方法研究
2021-06-04张宏伟秦孔建郭魁元
王 宇, 张宏伟, 张 通, 刘 磊, 秦孔建, 郭魁元
(1.中汽研汽车检验中心 (天津)有限公司,天津 300300;2.中国汽车技术研究中心有限公司,天津 300300)
1 引言
车辆智能化的发展趋势预示着智能化电子电气系统承担着越来越多的安全职责。智能网联汽车的快速发展促使车辆所具备的智能化辅助功能日益复杂,由此带来的风险概率也逐渐增加。智能化辅助系统一旦发生失效,将会造成非常严重的交通事故,后果不堪设想。为此,全国汽车标准化技术委员会在2017年颁布实施了GB/T 34590《道路车辆 功能安全》标准,旨在提高道路车辆电子电气系统的可靠性[1]。
智能辅助系统按车辆的行驶状态可分为行车功能和泊车功能。目前国内已量产的车辆具有的泊车辅助功能主要有3类,分别为:自动泊车辅助 (APA,Auto Parking Assist)系统、远程遥控泊车辅助 (RPA,Remote Parking Assist)系统、自动代客泊车 (AVP,Automated Valet Parking) 系统[2]。本文针对更具智能化的RPA系统进行功能安全分析与讨论,设计其整车级测试评价方法,并进行试验验证。
2 功能安全简述
GB/T 34590《道路车辆 功能安全》中对功能安全的定义是:不存在由电子电气系统的功能异常表现引起的危害而导致不合理的风险[1]。安全是未来汽车发展的首要因素,而功能安全的最终目的就是确保车辆在运行过程中的安全,即便车辆的电子电器系统出现故障,依然可以保证车辆能够安全地运行。功能安全标准提供了一个包括管理、开发、生产、运行、服务等汽车全生命周期过程,国内外主流车企、零部件供应商均已将功能安全要求嵌入到其研发生产过程当中,并且功能安全得到越来越多的重视[3]。
3 RPA测试方法研究
3.1 RPA系统简述
RPA系统是在自动泊车技术的基础之上发展而来的,该技术的诞生能够很好地解决停车后难以打开自车车门的场景。车载传感器主要由12个超声波传感器、4个环视摄像头组成,车内RPA控制器将超声波信号和摄像头信号进行融合,做出判断,控制车辆行驶。RPA系统一般使用遥控钥匙或手机APP作为车辆的遥控装置,遥控钥匙与车辆之间采用LF/RF射频通信;手机APP采用蓝牙、WIFI或4G等不同通信方式进行通信[4~5]。RPA系统的硬件组成架构如图1所示。
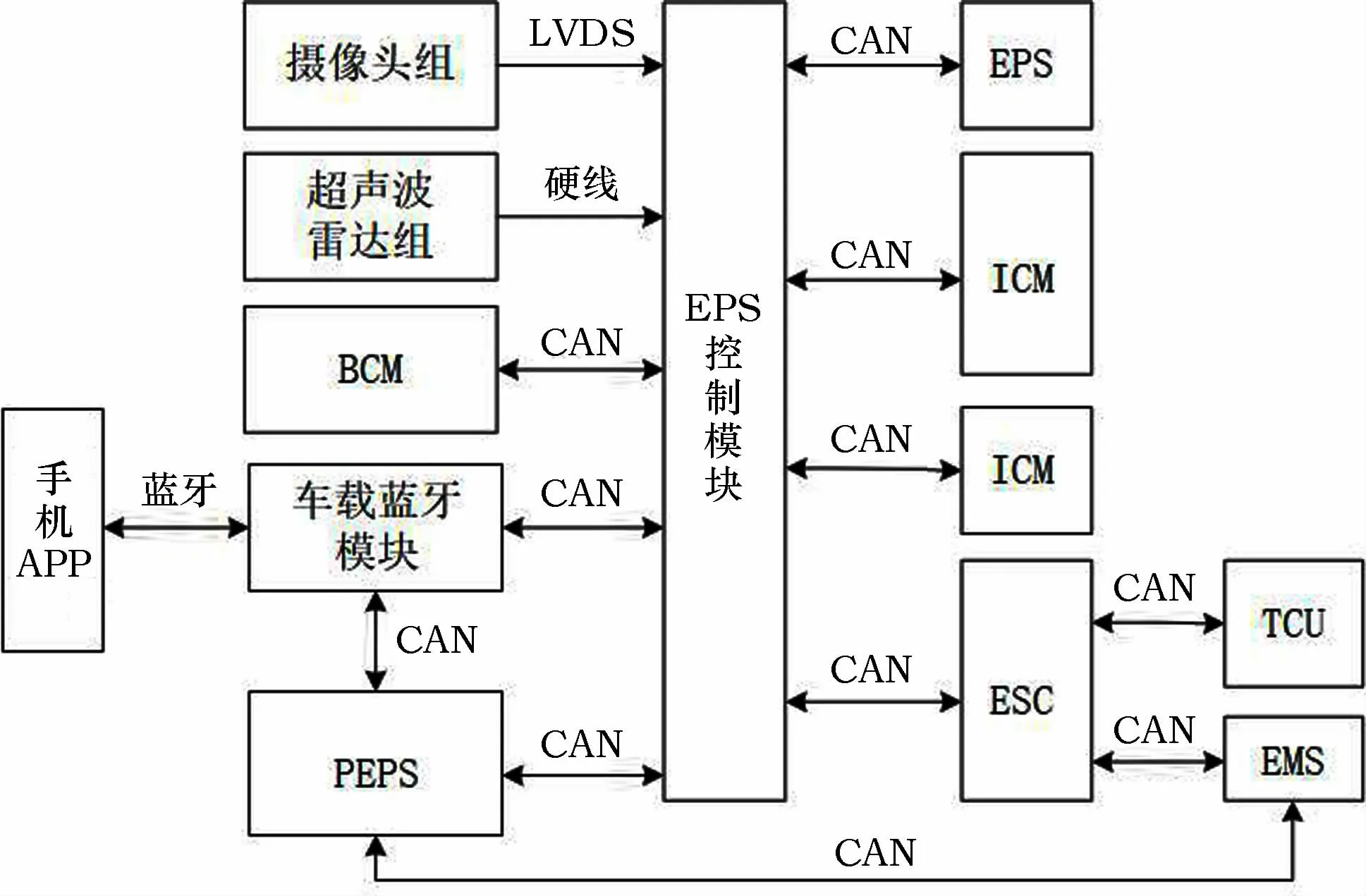
图1 手机APP式RPA硬件架构
3.2 功能安全分析
进行RPA系统测试评价方法研究的前提是对RPA系统进行功能安全相关的分析。对RPA系统进行危害分析和得出安全目标的过程遵循了GB/T 34590《道路车辆 功能安全》标准要求,主要有相关项定义、危害分析、危害事件、风险评估和整车级安全目标5个过程[6]。最终设计得出能够确认车辆是否满足安全目标的测试方法。
通过进行功能安全相关分析,综合考虑危害事件的危害程度和泊车场景兼顾等多方面,挑选出以下几种典型的危害事件。危害事件如表1所示。
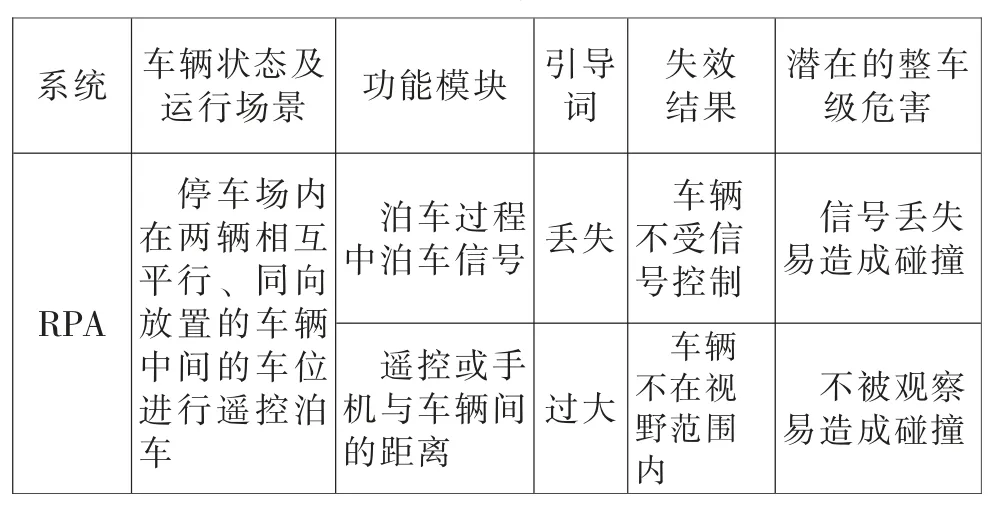
表1 危害事件列表
3.3 测试方法设计
3.3.1 RPA持续遥控功能丢失
3.3.1.1 测试场景
采用置于两辆相互平行、同向放置的车辆中间的车位进行试验。车位的长度X0=5.3m,宽度Y0=2.4m,RPA持续遥控功能如图2、表2所示。
3.3.1.2 测试方法
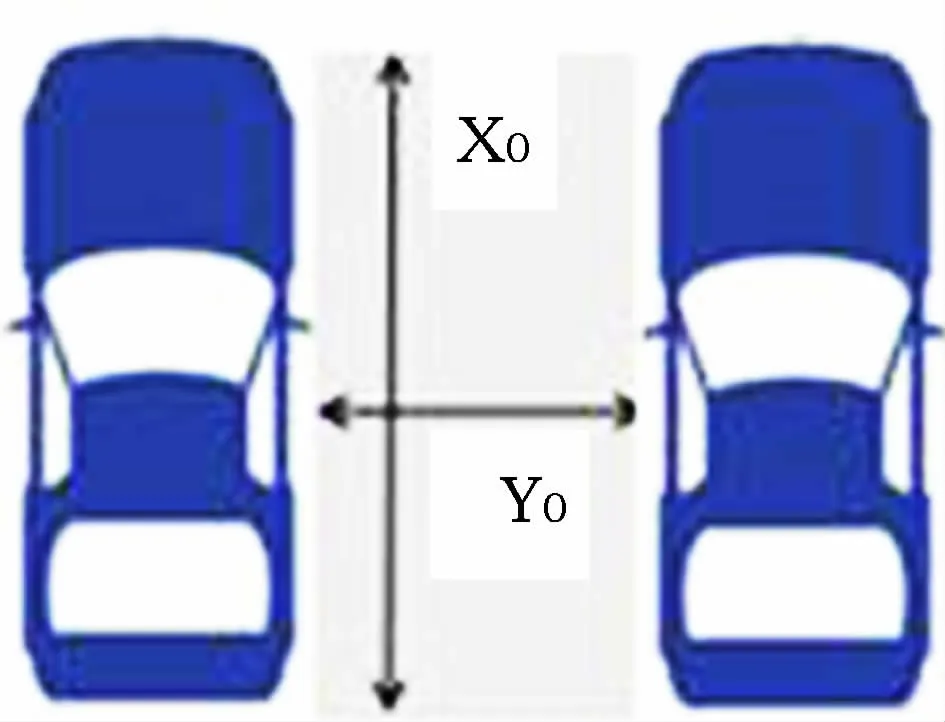
图2 RPA持续遥控功能丢失场景

表2 RPA持续遥控功能丢失试验场景
1)RPA持续遥控功能丢失测试试验场景如图3所示,当测试车辆结束车位扫描并停车后,测试人员在遥控距离有效范围内应用遥控装置启动泊车功能,启动方式按照系统设计要求进行,观察车辆是否能够正常实现泊车功能。
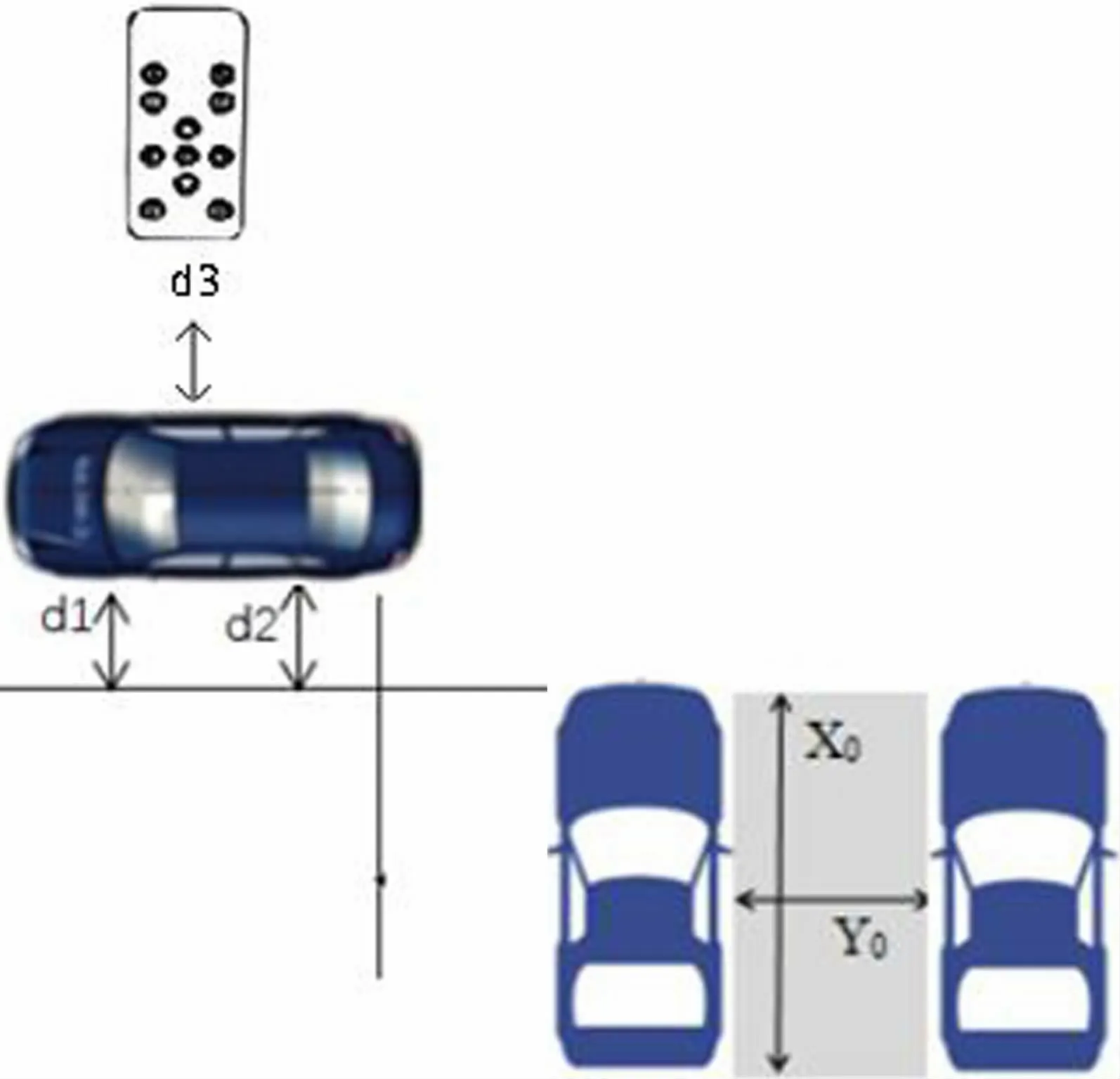
图3 RPA持续遥控功能丢失测试示意图
2)当测试车辆结束车位扫描并停车后,测试人员在遥控距离有效范围内应用遥控装置启动泊车功能,启动方式按照系统设计要求进行,在此过程中,注入遥控故障。RPA故障形式如表3所示。

表3 RPA故障形式表
若车辆能够在遥控距离6m内正常实现泊车功能,且遥控故障注入后,系统报警、功能退出/暂停、车辆刹停,则能保证系统的安全措施满足了安全要求。
3.3.2 RPA遥控功能误用
3.3.2.1 测试场景
采用置于两辆相互平行、同向放置的车辆中间的车位进行试验。车位的长度X0=5.3m,宽度Y0=2.4m,RPA遥控功能误用场景如表4所示。

表4 RPA持续遥控功能误用场景
3.3.2.2 测试方法
1)试验场景如图4所示。当测试车辆已结束车位扫描并停车后,测试人员在遥控距离6m内应用遥控装置启动泊车功能,观察车辆能否正常启动。
2)当测试车辆已结束车位扫描并停车后,测试人员应用遥控装置分别在垂直A、B、C3点6.1m处启动泊车功能并控制泊车。车辆长度为L,B点为车辆外沿中点。
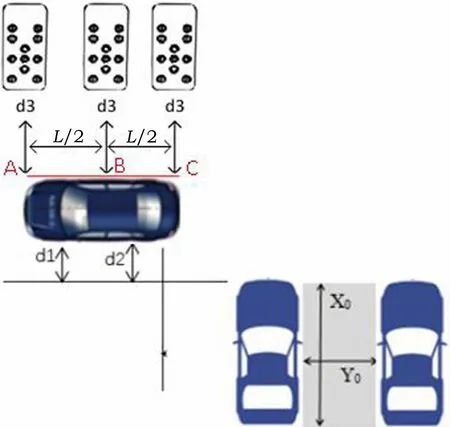
图4 RPA遥控功能误用测试示意图
若车辆能够在遥控距离6m内正常实现泊车功能,且A、B、C三点3次试验中,泊车功能均未开启,则能保证系统的安全措施满足了安全要求。
4 实车测试验证
为保证RPA测试评价方法的有效性和合理性,需要与行业专家进行讨论研究,另外也需要对在售车辆进行实车测试验证。本文挑选了市场上具备RPA系统的2种车型X、Y,在中汽中心园区试验场进行了相关验证测试,2种车型的试验结果如表5、表6所示。
试验结果表明,车型X、Y试验结果的表现形式不同,并且能够检测出不同车辆在故障注入后的不同表现,能够判断不同车型是否满足安全要求。这很大程度上表明设计的该RPA测试评价方法具备合理性和可实施性。
5 结论
本文通过对RPA系统进行硬件架构分析,进行功能安全危害分析,并结合实际的运行场景确定整车级危害。最后,在以上对RPA系统分析的基础上,为了验证不同车辆能否达到功能安全要求,设计了相应的测试方法及故障注入方式,并选取了市售的车型X、车型Y进行测试验证,验证了测试方法的合理性和可实施性,为RPA系统的功能安全开发及测试验证提供了指导依据。
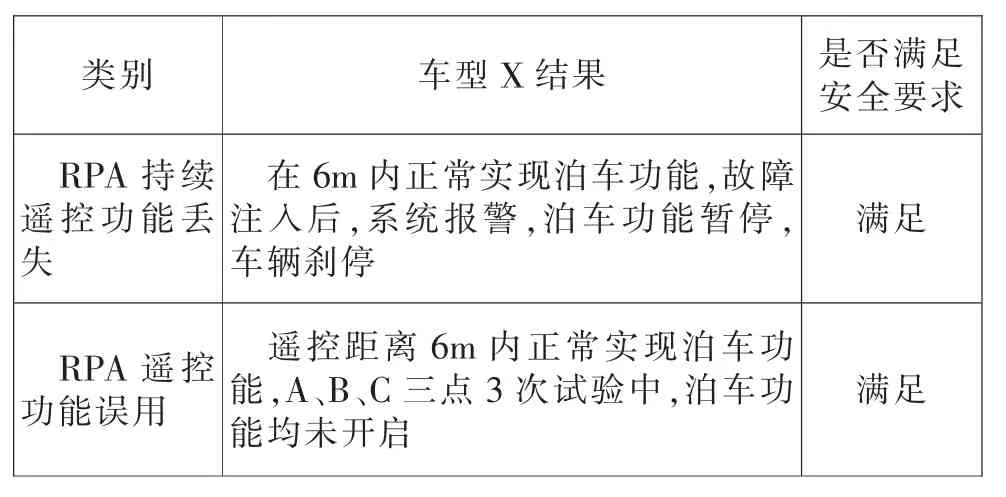
表5 车型X试验结果列表
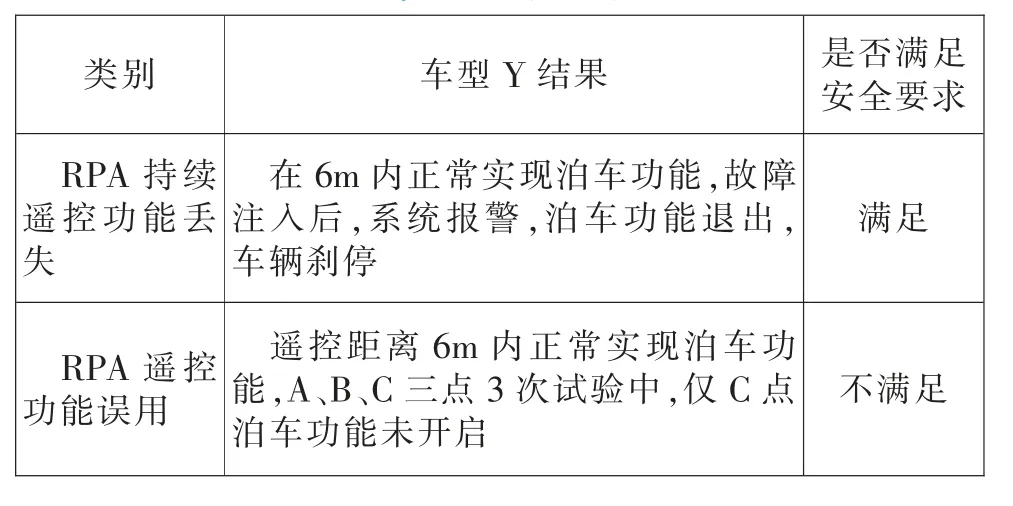
表6 车型Y试验结果列表
