单向双轴振动台与结构相互作用的影响及补偿
2021-06-03王巨科李小军李芳芳
王巨科, 李小军, 李芳芳, 李 娜, 张 斌
(1. 北京工业大学 城市建设学部,北京 100124; 2. 中国地震局地球物理研究所,北京 100081;3. 天津城建大学 天津市土木建筑结构防护与加固重点实验室,天津 300384)
电液振动台能够较精确地复现研究对象所受的各种激励,并被广泛地应用于工程抗震研究[1-4]、汽车道路模拟[5]及航天振动测试[6]等领域。振动台与研究结构的相互作用会对振动台控制造成不利的影响,使得振动台的使用频带降低,激励复现精度下降等。这种控制与对象(结构)之间的相互作用同样也存在于机械、航空航天等领域的柔性机械臂[7]、压电结构[8],土木工程领域的减隔震装置[9-10],以及车辆工程领域的振动控制系统[11]之中。国内外学者在建立了这些领域的系统模型的基础上,研究影响相互作用的因素,并提出不同的解决方案。研究人员通常从结构系统和控制系统两方面来开展相互作用的影响因素研究。结构系统的质量[12]、刚度和阻尼[13]等会对相互作用产生一定的影响。同时,控制系统的控制算法[14]和控制策略[15]也是影响相互作用的主要因素。此外,国内外学者从更专业的应用角度分析了影响相互作用的因素,主要有机械臂的柔度[16]、压电结构的厚度及网格大小、电机驱动系统的齿隙的非线性[17]、风车电机的传动比[18]、结构振动控制装置的时滞时变[19]及座椅悬挂系统的刚度和阻尼等。针对控制与结构的相互作用带来的影响,在机械,航空航天,以及车辆工程等领域,众多学者提出了不同的结构/控制一体化设计方法[20-22]来改进结构系统和控制系统的设计。目前国内外的一体化设计研究尚不完善,且针对曲壳压电结构、多电机伺服系统的一体化研究还值得进一步拓展。改进控制系统的设计是土木工程领域减小相互作用的主要措施,建立相互作用的精确模型[23]以及考虑多维度的相互作用[24]是研究工作的重点。
同上述领域中的研究思路基本相同,国内外学者在建立了振动台与结构的系统模型的基础上,进一步对影响振动台控制性能的因素进行了研究。Blondet等[25]研究了结构与振动台的质量比、结构阻尼比和频率对控制性能的影响,得到了以下结论:随着质量比和频率的增大,在结构自振频率及周围的频段出现的共振峰和反共振峰(峰谷效应)变大,而阻尼比的变化对控制性能产生了与质量比和频率相反的影响。李喧等[26]研究了N个自由度的结构对控制性能的影响,结果表明:结构的非线性是影响控制性能的主要因素,同时提高振动台与结构的质量比能够提升振动台的控制性能。唐贞云等[27]研究了不同自由度的结构的特性(质量比、阻尼比和频率)对控制性能的影响,指出结构的频率对控制性能的影响最大,阻尼比次之,质量最小。此外,研究还得出了以下结论:对于多自由度结构,只需考虑其前几阶振型中起控制作用的振型对控制性能的影响。除了研究不同的结构特性对控制性能的影响外,一些学者从振动台角度研究了影响控制性能的因素。Maoult等[28]采用有限元验证了大型振动台试验中结构频率降低的结果,指出了振动台的台面变形是产生相互作用的主要原因。Li等[29]建立了双振动台台阵与结构的系统传递函数矩阵(transfer function matrix,TFM),该传递函数矩阵包含了每一个振动台与结构的相互作用的传递函数和受相互作用影响的两振动台间的耦合作用的传递函数,研究结果表明:受相互作用影响的两振动台间的耦合作用在结构自振频率及周围的频段会对振动台的控制性能造成影响。李振宝等[30]在建立了振动台与结构的系统模型的基础上,分析了系统在刚性负载设计控制参数和空载设计控制参数下的稳定性,结果表明在空载设计控制参数下的系统稳定性更优。Conte等[31-32]研究了控制参数(proportion intergration differentiation, PID)控制参数、前馈和压差控制增益)和伺服阀时滞对振动台传递函数影响的敏感性,并指出伺服阀时滞对振动台的传递函数有很大的影响。
在补偿振动台与结构相互作用的控制策略方面,众多学者采用了离线和实时在线的补偿控制策略。Fletcher[33]在得到系统逆传递函数的基础上,通过多次离线迭代修正了控制信号,并提升振动台的控制性能。然而多次迭代可能对结构本身造成不可恢复的损伤,进而影响试验结果。Twitchell等[34]通过试验辨识和校正得到了系统的传递函数,并在此基础上根据系统的逆传递函数生成了离线的前置滤波器来修正控制信号,显著地改善了振动台在低频段的控制性能。Dozono等[35]提出一种实时补偿的控制策略,该策略根据结构的理论模型计算得到了振动台与结构的相互作用的传递函数,并结合系统的逆传递函数生成了补偿信号,提升了振动台的控制性能。唐贞云等根据结构的理论模型近似计算结构反力,提出一种实时反力补偿的策略,很好地补偿了振动台与结构的相互作用。Li等采用力反馈的控制策略实时地补偿了双振动台台阵与结构的相互作用,该策略采用激振器出力与振动台所需推力相减的方法得到相互作用力的大小,并与阀控系统的逆传递函数相结合,从而得到补偿信号。Seki等[36]采用自适应陷波滤波器辨识了非线性结构的动态模型,并在此基础上实时地补偿了振动台与结构的相互作用。田磐等[37]采用自适应控制器对相互作用所导致的峰谷效应进行辨识,并相应地调整控制信号,从而补偿了振动台与结构的相互作用。Nakata[38]基于结构与振动台的开环传递函数模型,提出了一种实时的加速度轨迹跟踪控制策略,并通过试验验证了该策略对相互作用补偿的有效性。Phillips等[39]提出了一种基于模型多参量的控制策略,通过传递函数离线迭代获得前馈输入信号,并利用线性二次型最优控制在线调节位移和加速度反馈信号的权重占比,从而提升了振动台的控制性能。
综上所述,国内外学者在建立了振动台与结构的系统模型的基础上,研究了结构(质量、阻尼、频率、非线性和自由度个数等)和振动台(台面变形、振动台间的耦合作用、控制参数和伺服阀时滞等)对控制性能的影响,并采用了离线补偿和实时在线补偿的控制策略来补偿振动台与结构的相互作用,提升振动台的控制性能。但上述研究基本上都是基于单轴振动台与结构的系统模型开展的,并未考虑相互作用对多轴振动台各激振器间的耦合作用的影响,进而也未考虑该耦合作用对振动台控制性能的影响。
本文以单向双轴振动台与中心对称的结构为研究对象,采用软件MATLAB建立了振动台与结构的传递函数矩阵,研究了结构与振动台的质量比,结构的阻尼比、频率,以及结构与振动台的转动惯量比对传递函数矩阵的影响。研究了相互作用对两激振器间的耦合作用的影响,以及对振动台控制性能的影响。在分析了振动台与结构的传递函数矩阵和分离出相互作用的传递函数的基础上,提出一种实时补偿的控制策略补偿振动台与结构的相互作用,并分别从频域和时域验证所提策略的有效性。
1 单向双轴振动台与结构的系统建模
单向双轴振动台与结构的系统建模的关键在于振动台在单水平向由两个激振器推动,二者相互耦合,系统为多输入多输出模型。此外,振动台与结构的转动惯量应在建模中予以考虑。系统建模的过程主要可分为单向双轴振动台与结构的动力学建模和单向双轴振动台与结构的液压及控制系统建模两步。
1.1 单向双轴振动台与结构的动力学建模
为简化分析,假定结构为单自由度体系,单向双轴振动台与结构的整体模型,如图1所示。同时,不考虑振动台与连杆支撑之间的刚度和阻尼,则单向双轴振动台与结构的动力学模型,如图2所示。其中:Mt为振动台台面质量;Ms为结构质量;K为结构刚度;C为结构阻尼;F1和F2分别为两激振器出力;xt为振动台台面的绝对位移;xs为结构对台面的相对位移;xts为结构的绝对位移;Fts为振动台与结构的相互作用力。
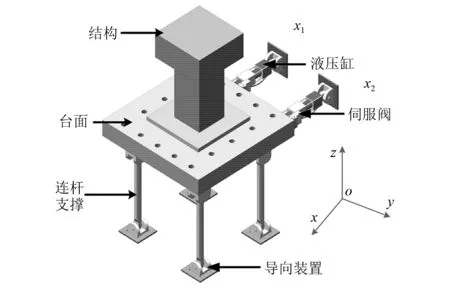
图1 单向双轴振动台与结构的整体模型Fig.1 Integral model of the unidirectional twin-axes shaking table and structure
采用李振宝等的分析方法对单向双轴振动台与结构进行动力学建模可得
Mts2xt-Fts=[Mt+MsHs(s)]s2xt=F1+F2
(1)
式中,Hs(s)为结构的绝对位移xts和振动台台面的绝对位移xt之间的传递函数,其表达式为
(2)

图2 单向双轴振动台与结构的动力学模型Fig.2 Dynamic model of the unidirectional twin-axes shaking table and structure
进一步将振动台与结构的动力学模型简化为等效模型,如图3所示。其中:AppL1和AppL2分别为两激振器的出力;x1为激振器1的位移;x2为激振器2的位移;l为振动台台面中心线到激振器的距离;Me为振动台和结构的等效质量;Je为振动台和结构的等效转动惯量;xt为等效质量的位移; φ为等效转动惯量的运动转角。

图3 单向双轴振动台与结构的等效模型Fig.3 Equivalent model of the unidirectional twin-axes shaking table and structure
综上可得单向双轴振动台与结构的动力学模型为
(3)
式中,Jt和Js分别为振动台台面和结构的转动惯量。
1.2 单向双轴振动台与结构的液压及控制系统建模
假定激振器1与激振器2的各个参数一致,对单向双轴振动台与结构的液压及控制系统进行建模。依据三连续方程对液压系统进行建模,其中三连续方程为[40]
(4)
式中:QL为伺服阀流量;Ap为活塞的有效承压面积;V为等效油缸全容积;β为油的体积弹性模量;Cc为油缸泄露系数;PL为负载压力;kq为滑阀流量增益;xv为滑阀阀芯位移;Kc为伺服阀压力流量系数。
基于建立的动力学模型,并结合三连续方程,可得单向双轴振动台与结构的液压系统模型为
(5)
式中:E1,E2分别为激振器1、激振器2的控制误差信号;Gq为伺服阀的传递函数;G2的表达式为
(6)
基于建立的液压系统模型,进一步对包含了三参量输入装置、反馈以及传感器在内的控制系统进行建模,最终可得单向双轴振动台与结构的系统模型为
(7)
写成传递函数矩阵的形式为
(8)
式中:H11,H22分别为受相互作用影响的激振器1、激振器2的传递函数;H12,H21分别为受相互作用影响的两激振器间的耦合作用的传递函数;u1,u2分别为激振器1、激振器2的控制信号;H11,H22与H12,H21的表达式为
(9)
式中:G3为三参量输入装置的传递函数;G5与G6的表达式为
(10)
式中:G4为三参量反馈的传递函数;Ga为传感器的传递函数。
单向双轴振动台的液压及控制系统的基本参数,如表1所示。同时也列出了振动台台面的相关参数。
2 结构特性对传递函数矩阵的影响研究
基于建立的单向双轴振动台与结构的传递函数矩阵,研究了结构与振动台的质量比(MR),结构的阻尼比(Z)、频率(F),以及结构与振动台的转动惯量比(JR)对传递函数矩阵的影响。设计了如表2所示的工况1~工况12来定性地研究不同的结构特性对H11,H22和H12,H21的影响,研究的关注点为:传递函数矩阵受影响的频段范围、变化趋势和敏感性。为便于观察,对受影响的幅频特性的细节进行了放大处理。

表1 单向双轴振动台的基本参数
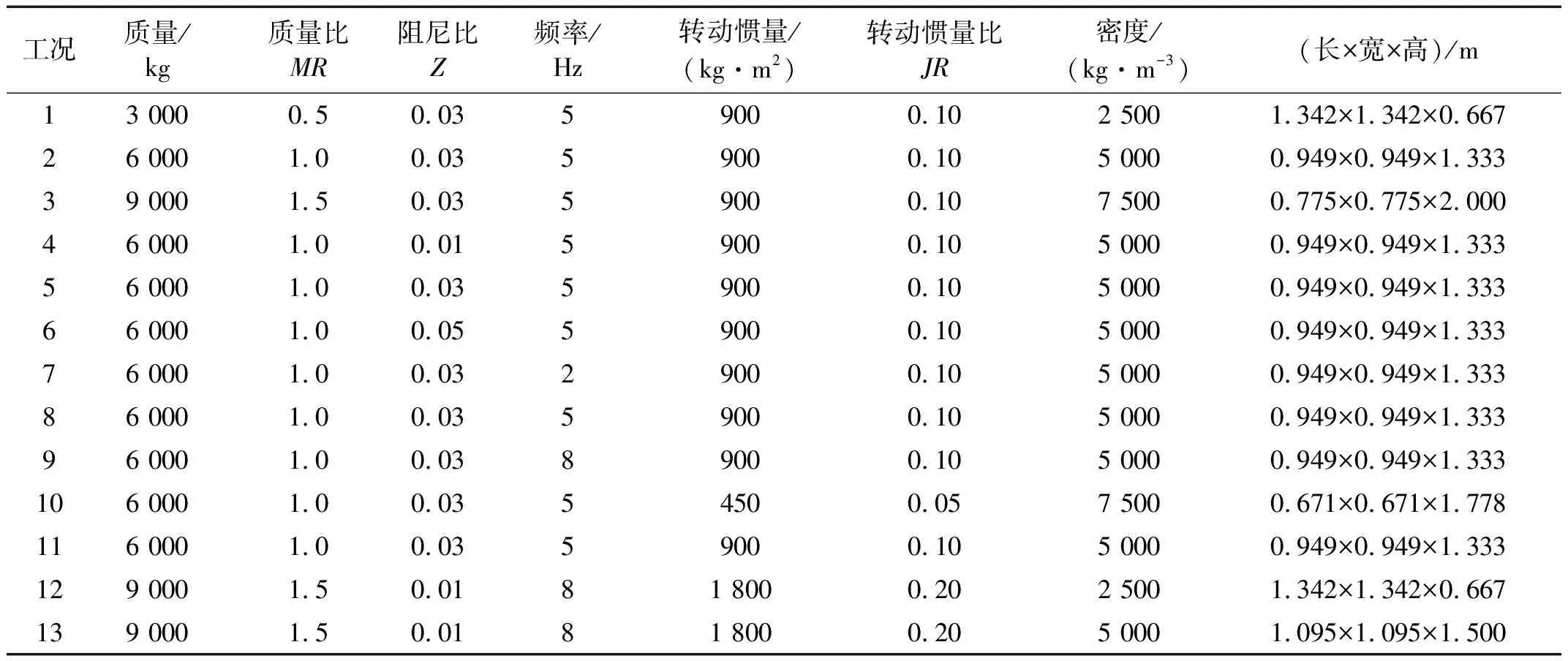
表2 不同工况下结构的基本特性
2.1 质量比对传递函数矩阵的影响
为研究质量比对传递函数矩阵的影响,设计了如表2所示的工况1~工况3。不同工况下各传递函数的频谱特性,如图4所示。

图4 质量比对传递函数矩阵的影响Fig.4 Effect of the mass ratio on the TFM
由图4(a)可知,随着质量比的变大,H11,H22在结构自振频率处及周围频段的峰谷效应变大。由图4(b)可知,随着质量比的变大,H12,H21在油注共振频率之前的幅频特性整体抬升幅度变大,且在结构自振频率处及周围频段的尖峰变大。
2.2 结构阻尼比对传递函数矩阵的影响
为研究结构阻尼比对传递函数矩阵的影响,设计了如表2所示的工况4~工况6。不同工况下各传递函数的频谱特性,如图5所示。由图5(a)可知,随着结构阻尼比的变大,H11,H22在结构自振频率处及周围频段的峰谷效应变小。由图5(b)可知,随着结构阻尼比的增大,H12,H21在结构自振频率处及周围频段的尖峰减小。
2.3 结构频率对传递函数矩阵的影响
为研究结构频率对传递函数矩阵的影响,设计了如表2所示的工况7~工况9。不同工况下各传递函数的频谱特性,如图6所示。由图6(a)可知,随着结构频率的变大,H11,H22在结构自振频率处及周围频段的峰谷效应幅度变大,影响范围变广。由图6(b)可知,随着结构频率的增大,H12,H21在结构自振频率处及周围频段的尖峰影响范围变广,峰值变大。
2.4 转动惯量比对传递函数矩阵的影响
为研究转动惯量比对传递函数矩阵的影响,设计了如表2所示的工况10~工况12。不同工况下各传递函数的频谱特性,如图7所示。由图7(a)可知,随着转动惯量比的变大,H11,H22在振动台液压驱动开环系统的固有频率(油注共振频率)处及周围频段的幅频特性减小。由图7(b)可知,随着转动惯量比的增大,H12,H21在油注共振频率处及周围频段的幅频特性变大。
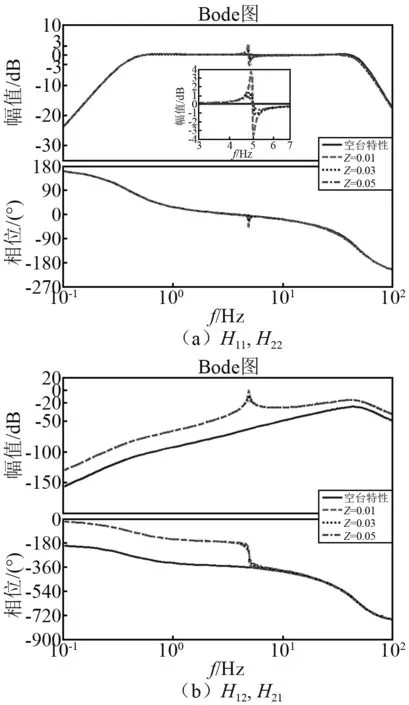
图5 结构阻尼比对传递函数矩阵的影响Fig.5 Effect of the damping ratio of structure on the TFM
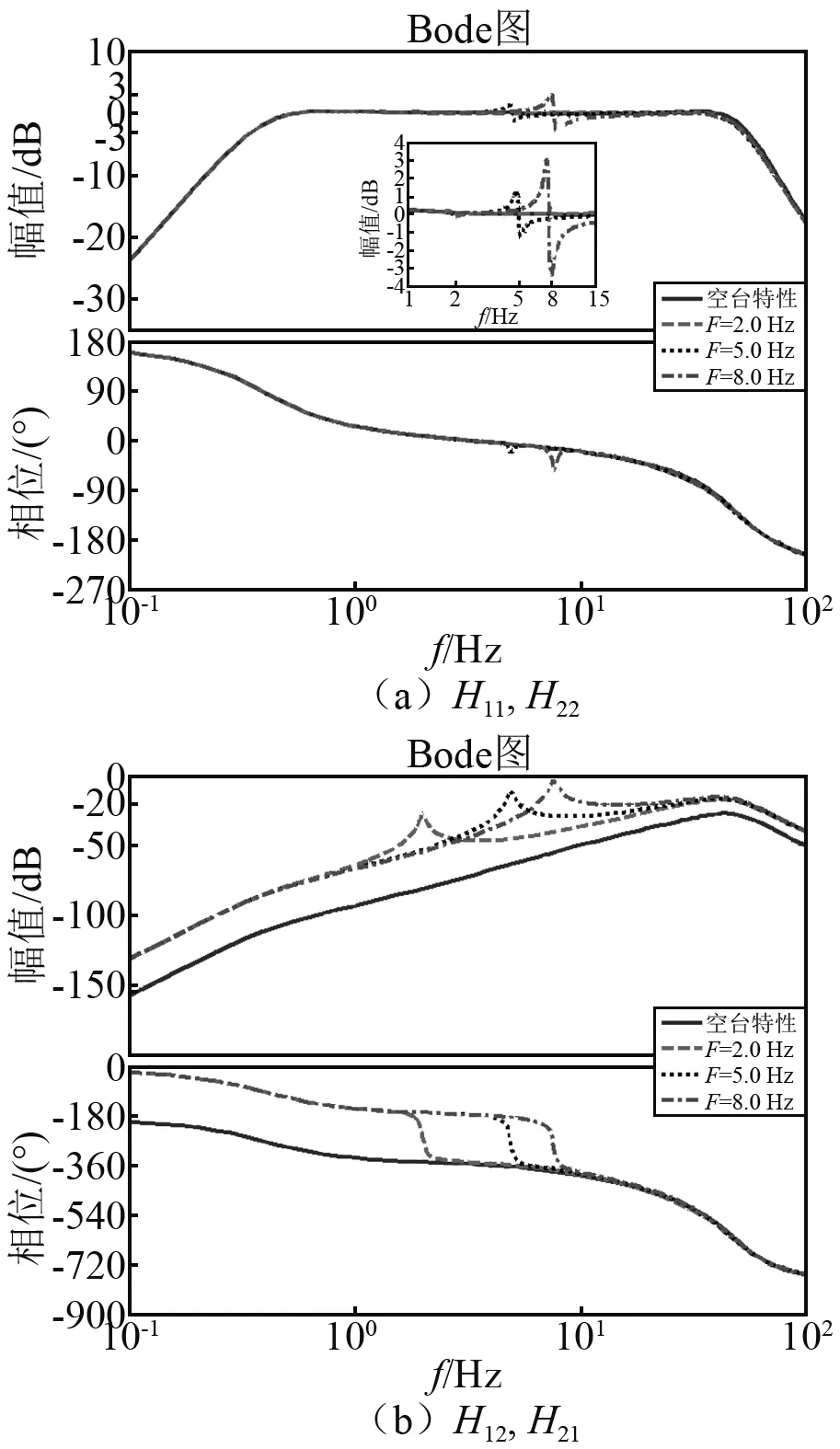
图6 结构频率对传递函数矩阵的影响Fig.6 Effect of the frequency of structure on the TFM
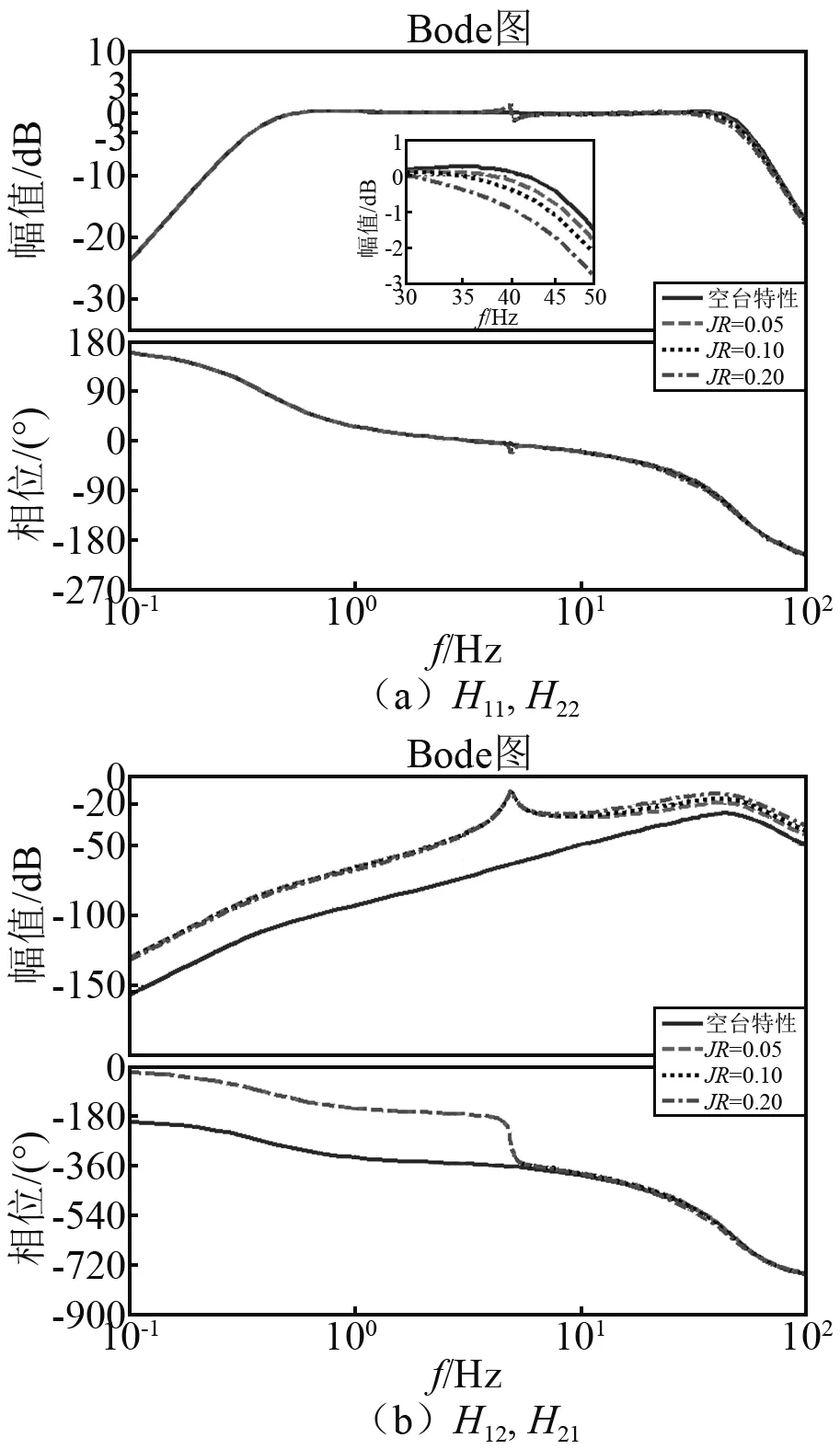
图7 转动惯量比对传递函数矩阵的影响Fig.7 Effect of the moment of inertia ratio on the TFM
综上所述,就对传递函数矩阵影响的频段范围而言:质量比、阻尼比和频率产生的影响集中在结构的自振频率及周围的频段,而转动惯量比产生的影响位于油注共振频率及周围的频段;就对传递函数矩阵影响的敏感性而言:在结构自振频率及周围的频段,频率的影响最为敏感,阻尼比次之,质量比的影响最小。
3 相互作用对振动台控制性能的影响研究
相比于以往对振动台控制性能的影响研究,考虑了受相互作用影响的两激振器间的耦合作用对振动台控制性能造成的影响。选取了表2中的工况13进行相互作用对振动台控制性能的影响研究。
相互作用对振动台控制性能的影响,如图8所示。由图8可知:在相互作用影响的频段范围内,振动台的控制性能出现了不同程度的下降。由图8(a)可知,由于相互作用的影响,H11,H22在结构的自振频率处及周围频段出现了峰谷效应,7.47 Hz处的共振峰峰值为8.07 dB,7.82 Hz处的反共振峰峰值为-9.24 dB;在油注共振频率处及周围频段的幅频特性略有下降,42.50 Hz处二者的差值为1.09 dB。由图8(b)可知,由于相互作用的影响,H12,H21在全频段范围内的幅频特性有了不同程度的抬升,且在结构的自振频率处及周围频段出现了尖峰,7.47 Hz处二者的差值为64.64 dB。由图8(c)可知,系统的传递函数在结构自振频率处及周围频段出现了峰谷效应,7.47 Hz处的共振峰峰值为13.60 dB,8.00 Hz处的反共振峰峰值为-17.50 dB;在10~30 Hz频段范围内的幅频特性有一定程度的下降(量化标准:二者差值<3 dB)。

图8 相互作用对振动台控制性能的影响Fig.8 Effect of the interaction on the control performance of the shaking table
此外,分析图8可知:由于相互作用的影响,两激振器间的耦合作用急剧变大,该耦合作用对振动台控制造成了极为不利的影响。
4 实时补偿的控制策略及仿真验证
上述研究表明单向双轴振动台与结构的相互作用对振动台控制造成了极大的影响。因此,提出了一种实时补偿的控制策略来补偿单向双轴振动台与结构的相互作用。该策略在分析了单向双轴振动台与结构的系统模型的基础上,分离出相互作用的传递函数,并进一步结合振动台阀控系统的逆传递函数来修正控制误差信号,从而达到补偿相互作用的目的。
以式(7)中的激振器1为例进行分析
(11)
为实时补偿相互作用带来的影响,不仅需要将相互作用对激振器1的影响消除,而且也要将激振器间的耦合作用中受相互作用影响的部分消除
(12)
假定补偿传递函数分别为C1和C2,则
E1=G3u1-G4Gax1-C1x1-C2x2
(13)
结合式(12)和式(13),可得
(14)
通过实时补偿,激振器1的传递函数为
(15)
分析可知,结构对激振器1的影响被完全地补偿,对于激振器2的补偿同理。进一步同单向双轴振动台与结构的控制系统相结合,可得出实时补偿的控制策略的框图,如图9所示。
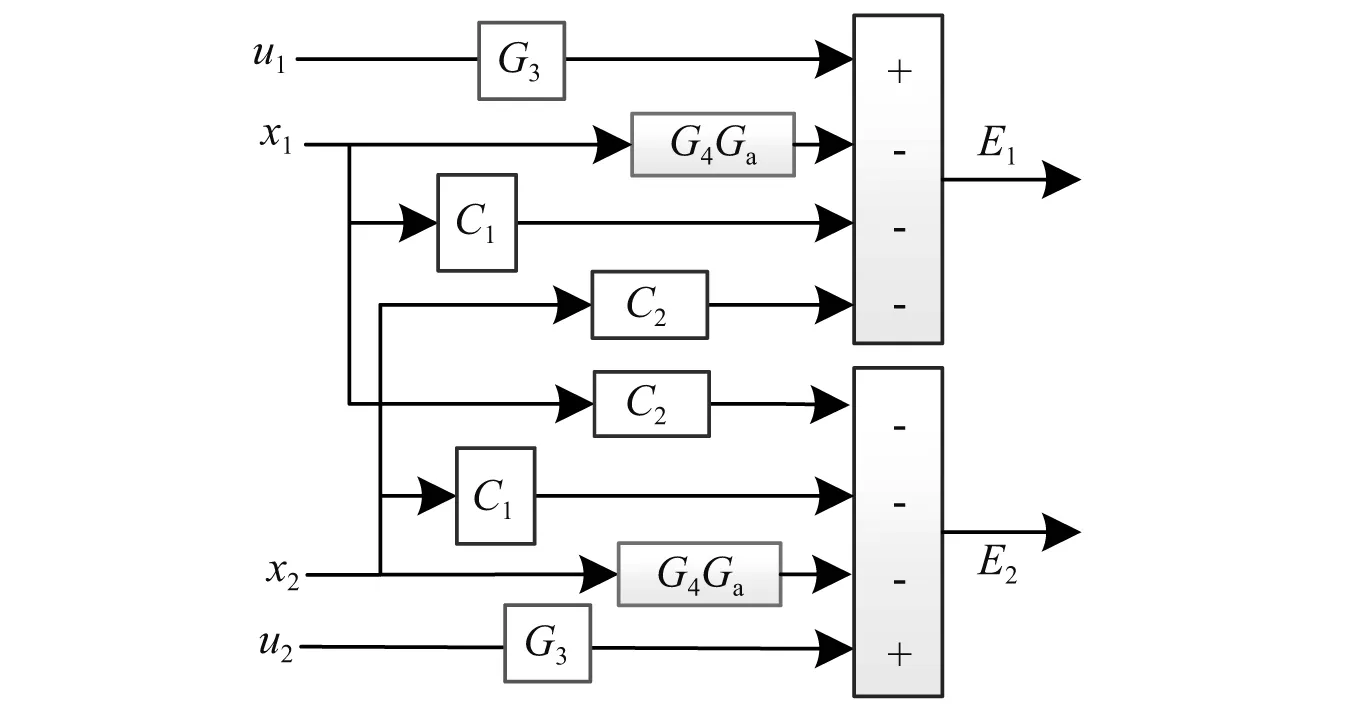
图9 实时补偿策略的方框图Fig.9 Block diagram of the real-time compensation strategy
选取表2中的工况13研究所提出的实时补偿的控制策略是否有效,补偿策略的有效性研究分别从频域和时域展开。
4.1 频域特性
采用上述补偿策略,振动台的控制性能如图10所示。由图10可知:补偿后的振动台的频谱特性与空台时的频谱特性一致,提出的策略完全地补偿了振动台与结构的相互作用。图10(a)表明:H11,H22在结构自振频率处及周围频段的峰谷效应得到了补偿;在油注共振频率处及周围频段的幅频特性虽略有上升,但与空台时的幅频特性相同。由图10(b)可得出该补偿策略对H12,H21的改善:两激振器间的耦合作用大大减小,并与空台时的耦合作用一致。图10(c)表明:所提出的实时补偿的控制策略完全地补偿了单向双轴振动台与结构的相互作用。
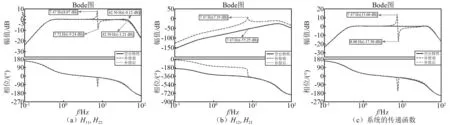
图10 实时补偿策略下振动台的控制性能Fig.10 The control performance of the shaking table under the real-time compensation strategy
4.2 时域特性
将6~10 Hz的随机波和10倍压缩的El-centro地震动记录作为激励信号输入到系统中,通过分析振动台的随机波复现精度和复现的地震动记录的傅里叶谱来研究所提出的实时补偿的控制策略是否有效。
4.2.1 随机波的复现
为研究所提补偿策略的有效性,特选用随机波(频率:6~10 Hz,幅值:±1 m/s2)作为激励信号输入到系统中。波形的复现情况如图11(a)所示,图11(b)给出三组波形评价指标,对比补偿前后的波形评价指标可得:采用了所提出的补偿策略,波形相关系数提升了37.90%,误差的峰值降低了79.78%,误差的RMS值下降了72.56%。振动台的随机波复现精度得到了大幅提升,说明了该补偿策略的有效性。
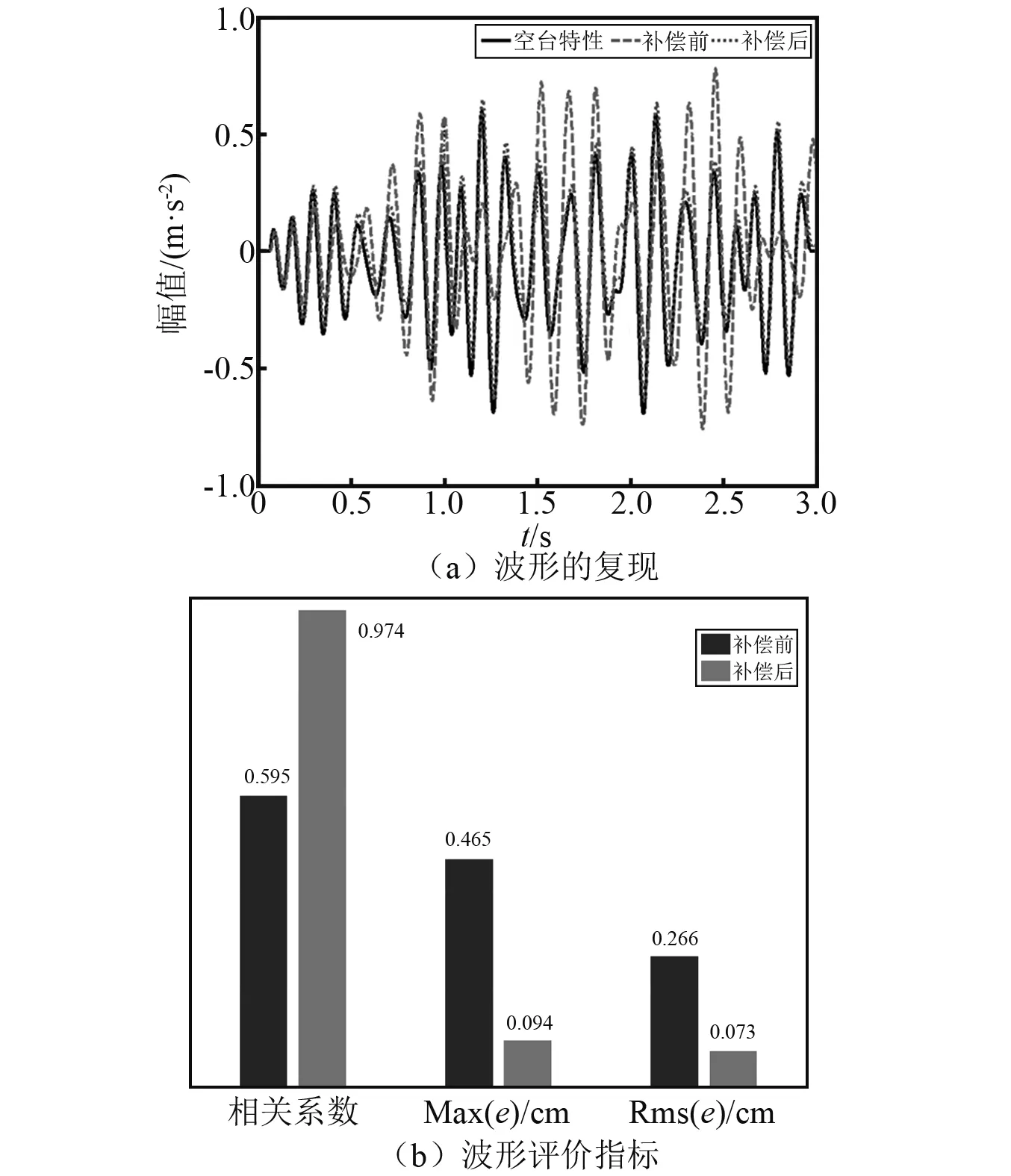
图11 随机波的复现Fig.11 Replication of the random wave
4.2.2 地震动记录的复现
为进一步研究提出的补偿策略在结构自振频率处及周围频段的有效性,将10倍压缩的El-centro地震动记录作为激励信号输入到系统中。图12(a)展示了记录的复现情况,可大致地看出复现精度有所提升。采用了如图12(b)所示的傅里叶谱来分析复现精度的提升情况,可以看出在5~15 Hz频段范围内的傅里叶谱得到了校正,说明了提出的实时补偿的控制策略有效。同时,该结果与振动台在频域补偿的结果高度一致,进一步说明了所提补偿策略的有效性。
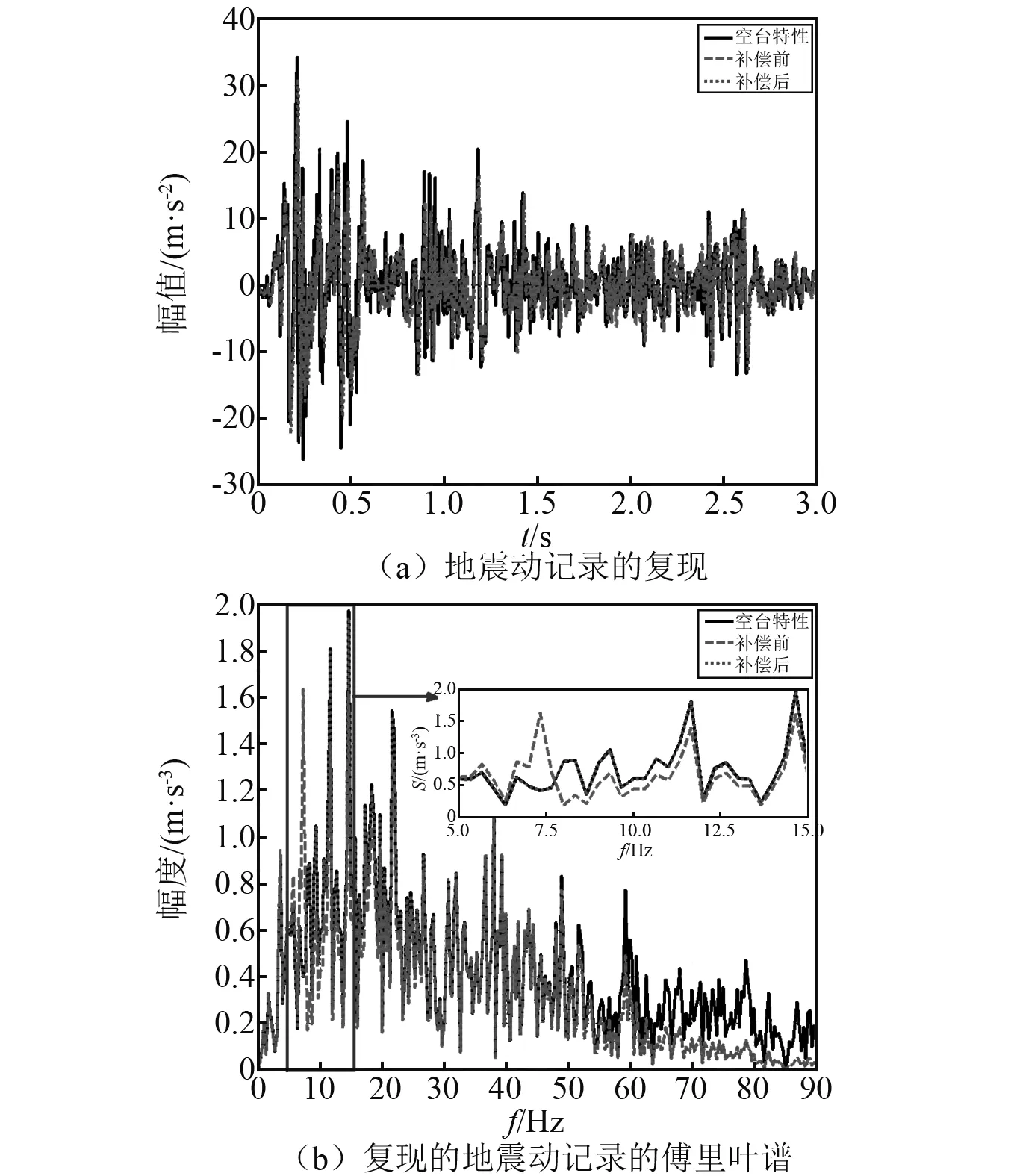
图12 10倍压缩的EL-centrol地震动记录的复现Fig.12 Replication of the 10-time compressed EL-centro ground motion record
5 结 论
本文以单向双轴振动台和中心对称的结构为研究对象,建立了振动台与结构的传递函数矩阵,对振动台与结构的相互作用进行了影响研究和实时补偿,得出了以下结论:
(1) 结构与振动台的质量比,结构的阻尼比、频率,以及结构与振动台的转动惯量比都对传递函数矩阵有影响。质量比、阻尼比和频率的影响集中在结构自振频率及周围的频段;而转动惯量比的影响位于油注共振频率及周围的频段。
(2) 相互作用对单向双轴振动台两激振器间的耦合作用的影响巨大,该耦合作用对振动台控制造成了极为不利的影响。
(3) 提出的实时补偿的控制策略有效地补偿了单向双轴振动台与结构的相互作用,极大地提升了振动台的控制性能。
本文的理论研究尚需进一步考虑实际工程情况和试验验证。
