智能垃圾桶系统的设计
2021-06-03西北民族大学电气工程学院李红艳韦继娇
西北民族大学电气工程学院 李红艳 韦继娇
人们越来越关注房屋中各种家用电器的智能性,因此各种垃圾桶(如推拉式垃圾桶、智能语音识别垃圾桶、多功能垃圾桶等)出现在市场上。垃圾桶自动分类功能为人们的生活带来方便。智能语音识别智能垃圾桶非常方便,语音识别算法可识别控制语音命令,例如前进、后退和打开/关闭指令以完成垃圾箱的远程非接触式智能打开和关闭移动功能。当前,许多发达国家正在开发新的智能垃圾桶使其具有更多功能,例如可调节的垃圾桶打开角度、自动分类垃圾桶和远程密封控制。
1 智能垃圾桶的发展状况
当前智能垃圾桶的智能功能比不上充满大脑的小冰、小爱和Siri。无论外观或功能如何,智能垃圾桶仍是一个桶,只能收纳垃圾。其智能就在于在原始设计中增加检测和密封功能。第一个是红外感应功能。红外传感器检测到人手的距离,并在人手靠近智能垃圾箱20 cm时自动打开垃圾箱的盖子,这样用户就可以丢弃垃圾而不碰垃圾桶(与带盖的封闭垃圾桶相反)。第二是密封功能。智能垃圾桶可以采用完全密封的设计。垃圾盖上有一个密封圈,合上盖子后可以确保垃圾不会溢出。
2 系统整体实现
2.1 系统设计
本智能垃圾箱控制系统可以实现的功能有:垃圾箱盖子的自动翻盖、箱满自动报警提醒、垃圾分类等。这些功能让用户便于投放垃圾,特别是在新冠疫情传染性极强的现在,避免用户和垃圾桶直接接触,会大大的降低间接传染一些细菌性疾病。本设计使用STC89C52RC单片机为核心元件(如图1所示)。
2.2 湿度感应模块
我们来分别垃圾是否是干垃圾还是湿垃圾,我们可以直接采用湿度传感器。因为垃圾标明如果是湿的达到一定值通过LM393比较器就可以进行判断。
LM393主要特点如下:
(1)该电路工作时电源电压范围跨度大,在单电源状态和双电源状态下都可工作,单电源:2V~36V,双电源:±1V~±18V;
(2)消耗电流小,Icc=0.8 mA;
(3)输入失调电压小,VIO=±2 mV;
(4)共模输入电压范围宽,Vic=0~Vcc-1.5V;

图1 设计框图

图2 LM393内部结构图
(5)输出与TTL、DTL、MOS、CMOS等兼容;
(6)输出可以用开路集电极连接“或”门。
LM393引脚图及内部框图如图2所示。
LM393是一个电压比较器,在接收光时将连接到R-Light端子的光电二极管的电阻值转换为电压信号,并将其传输到电压比较器的同相输入端子INB +,比较输入端子INA-的参考电压。如果非反相端子INB +处的电压大于反相端子INA-处的电压,则电压比较器的输出端子OUT输出高电压。当非反相端子INB+的电压低于反相端子INA-时,电压比较器的输出端子OUT输出低电压,此时Light-LED指示灯亮。没有光时光电二极管的电阻非常大,由电阻器R23和光电二极管形成的分压器的电压增加,使得非反相端子INB +处的电压大于反相时的电压。电压比较器的INA端子和输出端子OUT作为高电平电压输出,此时LightLED指示灯熄灭。在光的存在下光电二极管的电阻很小,由于由电阻器R23和光电二极管形成的分压器的电压下降,因此非反相端子INB +处的电压低于反相端子处的电压。 电压比较器的输出端子OUT为低电平并且电平电压,此时LightLED点亮。连接到反相端子INA-端子的电位器VR2用于调节该端子的电位电压,该电压也是用于光敏度调节的电压比较器输入的阈值翻转电压。
该设计使用LM393电压比较器进行电压比较,水位传感器和电位器设置电压比较,当水位传感器检测到水位时,LM393比较器输出低水位,微控制器检测到低水位以确定水位。
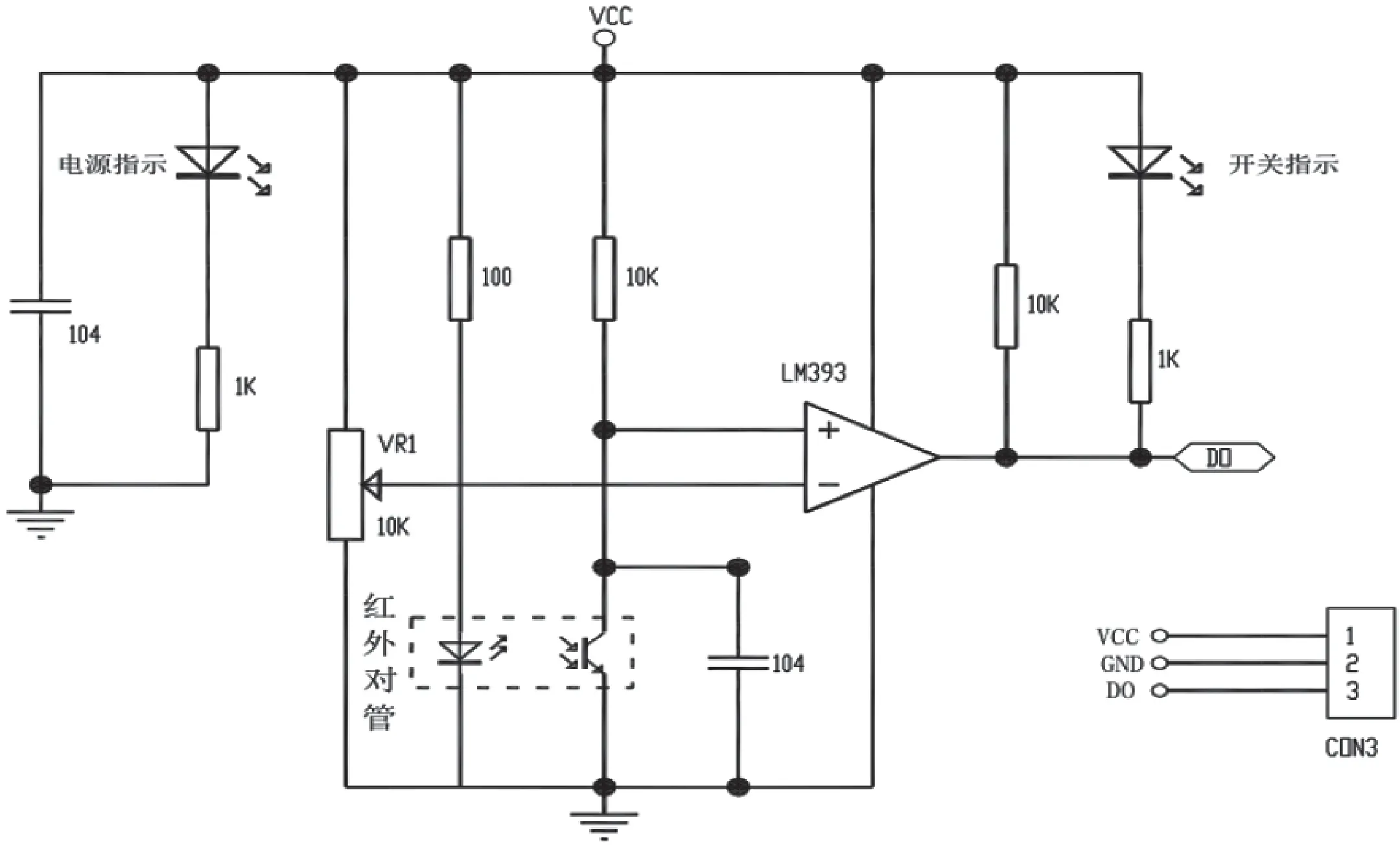
图3 红外感应模块电路
2.3 金属检测模块
当我们将垃圾放入垃圾桶时,红外传感器检测到有人,并且金属检测器开始检测垃圾桶中是否存在金属。如果有金属,请按下按钮以打开特殊垃圾收集按钮,然后在两者之间创建电场强度变化,以识别是否是金属垃圾并在模块上发出金属垃圾信号。探头产生的电磁场与金属一起使用以产生涡流,涡流作用在探头上以改变探头电路的阻抗从而改变振荡器的幅度,它被放大并变成音频信号。
2.4 六反相器数字集成电路探测金属
其关键组件是CMOS 6反相器数字集成电路a(i至vi)。在该电路中,反相器i和ii均用作放大器。金属探测器的探头是一个高q值电感器l,该电感器l形成了一个电容性三点振荡器,它具有反相器i和振荡频率约为27 kHz的电容器c1至c3。调节电位器rp可使电路进入刚启动状态。通常弱振荡信号被反相器ii和电阻r1组成的放大电路放大,然后由二极管vd1整流,因此反相器iii的输入端子始终处于低电平并通过反相器iii,iv整形。输出低电平,VD2正向偏置打开,由反相器v和vi、r3、r4、c6等组成的音频振荡器不工作,电磁测深仪b安静。当金属物体接近感应器l时(沿感应器线圈的轴向),l的q值下降,并且振荡电路停止振动。因此,反相器ii没有振荡信号输出,反相器iv输出高电平,vd2的反向偏置被关闭。由反相器v和vi组成的音频振荡器工作,反相器vi的输出产生一个串联。正脉冲信号为R5电流限制,vt功率放大,然后驱动b发出“ di ----”蜂鸣声。
2.5 红外感应模块
红外传感器模块的工作原理是检测在红外传感器额定范围内是否存在物体,然后在检测后将这些信息集成到单片机中。其模块电路图如图3所示。
红外感应模块的最大有效检测距离主要由反射型红外光电传感器的特性决定,同时受测量对象的红外反射特性影响很大,还可以根据检测灵敏度进行调整。对于典型的物体检测应用,有效检测距离通常可以达到0.1m~0.2m。通常情况下,具有光滑表面和良好反射特性的物体易于检测,并且有效感测距离相对较大;具有较差反射特性的物体更难以检测,并且有效感测距离相对较小。
RPR220是集成的反射红外探测器,RPR220的塑料透镜使这种类型的传感器高度敏感,并且内置的可见光滤镜还减少了不连续光对测量的影响从而大大减少了检测误差。最后,RPR220红外传感器体积小,结构紧凑,并适合垃圾桶外壳的夹层。
