基于光纤微震传感的煤矿防越界开采监测系统
2021-06-03郭书全胡宾鑫张永利宋广东
郭书全,胡宾鑫,张永利,全 霓,朱 峰,张 华,宋广东
(1.陕煤集团神木柠条塔矿业有限公司,陕西 神木 719314;2.齐鲁工业大学(山东省科学院)激光研究所,山东 济南 250014;3.陕西领睿电子科技有限公司,陕西 西安 710054)
0 引言
近年来,一些煤矿企业法制观念淡薄,受利益驱动,越层越界开采行为时有发生,非法越界开采既破坏和浪费了宝贵的矿产资源,又扰乱了正常的矿产资源开发秩序,同时还会造成矿井相互连通的重大安全隐患,是煤矿冒顶、透水、瓦斯爆炸等恶性事故的重要原因[1-2]。井下越界开采具有隐蔽性强、不易发现的特点,目前国内对煤矿越界开采的监测主要采取专人定期现场巡查、临时抽查的方式,但由于没有明确的方位性,效率低下,耗费大量人力、物力资源;不能实时监测越界行为,出现越界开采事件难以及时发现,大多是等越界开采规模较大甚至是发生矿难的时候才察觉,但所发生的巨大损失已无法弥补;有时抓到了不法分子,由于证据不足,不能对其进行应有的惩罚。因此,对越界开采活动进行实时在线监测,确保科学执法已成为亟待解决的问题。
煤矿井下开采活动会引起岩石破裂和应变能释放卸载,产生微地震波信号,利用微震监测和定位技术,通过对接收到的微震信号进行处理、分析,确定微震事件发生的位置、大小、数量及能量释放等信息,可作为评价煤矿越界开采活动的依据[3]。目前,传统矿用微震监测系统仍普遍使用电磁式或压电式微震传感器,在信号拾取和传输过程中易受电磁场干扰,难以实现微震信号保真拾取;由于供电限制,对诸如煤矿采空区等危险源或密闭区域难以布设,造成监测盲区[4]。此外,传统基于迭代求解的时差定位算法,如Geiger法、最小二乘法、牛顿迭代法等,一般要求震源位于传感器阵列范围之内,而对于煤矿井田边界防越界开采位微震监测,震源位置通常位于传感器阵列之外,传统定位算法的定位精度将大大降低甚至无法定位,这在很大程度上限制了防越界开采微震监测预警的准确性与及时性[5-8]。
针对上述问题,设计了一种具有无源本质安全、抗电磁干扰、定位精度高等特点的全光纤煤矿防越界开采在线监测系统,基于光纤微震传感网络,构建煤矿防越界开采实时在线监测系统,并在陕西柠条塔煤矿进行示范应用。
1 光纤微震监测系统
1.1 光纤微震传感器
光纤微震传感器基于悬臂梁结构和光纤光栅技术设计,结构模型如图1所示。传感器内部主要由弹性膜片、带有质量块的L型悬臂梁和光纤布拉格光栅组成。光纤光栅一端连接在悬臂梁上,另一端连接在外壳上。地震波传至质量块产生加速度,进而引起弹性膜片和光纤光栅的应变变化。利用光纤光栅的布拉格波长漂移来检测光纤光栅的应变变化,从而得到加速度值[9]。
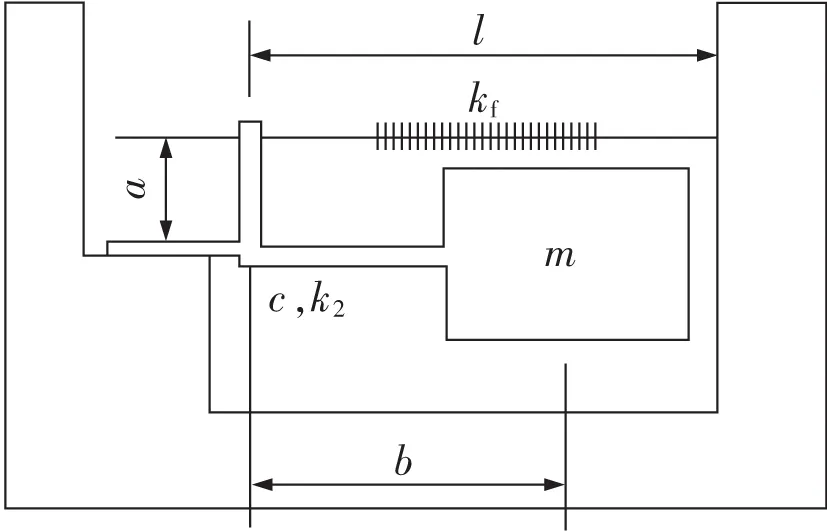
图1 光纤加速度传感器模型Fig.1 Model of fiber-optical acceleration sensor
如图1所示,k1为光纤的弹性系数,k2为结构的弹性系数,c为介质阻尼系数,m为质量块的质量。系统总的弹性系数k为
(1)
传感器的固有频率可以定义为
(2)
假定外部加速度B=Aejωt,相对阻尼系数为δ,则在光纤光栅上产生的应变可表示为
(3)
当阻尼比ξ=δ/ω0=0.7,则应变加速度灵敏系数为
(4)
光纤光栅波长变化与应变成比例。典型的光纤光栅应变灵敏度为1.2 pm/με,因此加速度灵敏度定义为
(5)
从式(2)和(5)可以看出,传感器的固有频率和加速度灵敏度主要由a、b、k1、k2和m等5个参数决定。优化的参数见表1。经计算,传感器的固有频率约为280 Hz,加速度灵敏度约为220 pm/g。

表1 传感器优化参数Table 1 Optimized sensor parameters
1.2 光纤微震解调系统
光纤微震解调原理如图2所示,采用窄线宽分布反馈激光器(distributed feedback laser diodes,DFB-LD)作为光源,将其波长置于光纤光栅微震传感器反射谱上-3 dB处,当传感器受外界震动,光纤光栅受到拉伸或压缩,使得折射率发生变化,光栅的波长就会左右移动,导致反射激光光强变化,通过检测该光强变化,就能得到加速度的大小[10]。
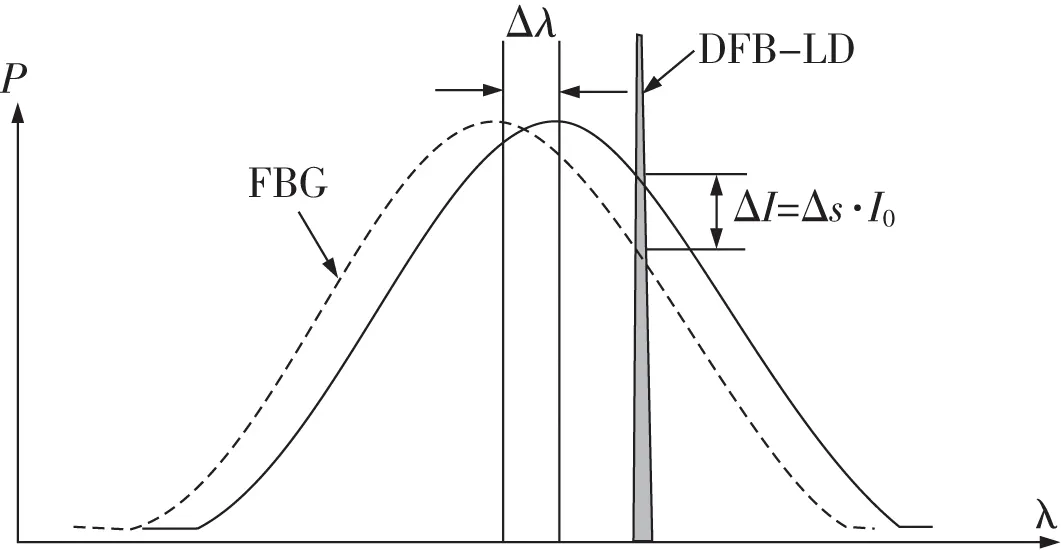
图2 光纤微震解调原理示意Fig.2 Principle of fiber-optical microseismic demodulation
假设激光器输出光功率为I0,光纤光栅微震传感器波长变化为Δλ,反射率变化为Δs,则光强变化为I0Δs。在测量范围内,Δλ相对较小,根据小信号模型原理,Δs和Δλ具有线性关系。此外,由于光电探测器输出电流和入射光强也具有线性关系。因此,输出信号可以表示为[11]
Is=k1I0(R+βΔλ)mA
(6)
式中,R为当DFB-LD在光栅的-3 dB时的反射率;m为光学耦合造成的系统噪声。参考信号可以表示为
Ir=k2nAI0
(7)
式中,n为光学耦合造成的系统噪声。将式(6)和式(7)相除,即可得到

(8)
实际应用中,由于光纤连接、弯折、耦合等原因,返回到探测器的光信号不同程度存在衰减现象。因此本设计使用具有大动态范围特性的对数放大器进行光电流信号的检测。利用其转换函数,可得到传感器检测光信号Is与激光器参考光信号Ir的归一化信号In为
Vn=k(Is-Ir)=klog10(R+βΔλ)
(9)
根据上述原理,得到光纤微震解调系统框图,如图3所示。系统由DFB-LD、恒流源、光电探测器、光环形器、对数放大器、仪表放大器、温控模块、模数转换器、数据采集单元、时钟同步单元等部分组成。
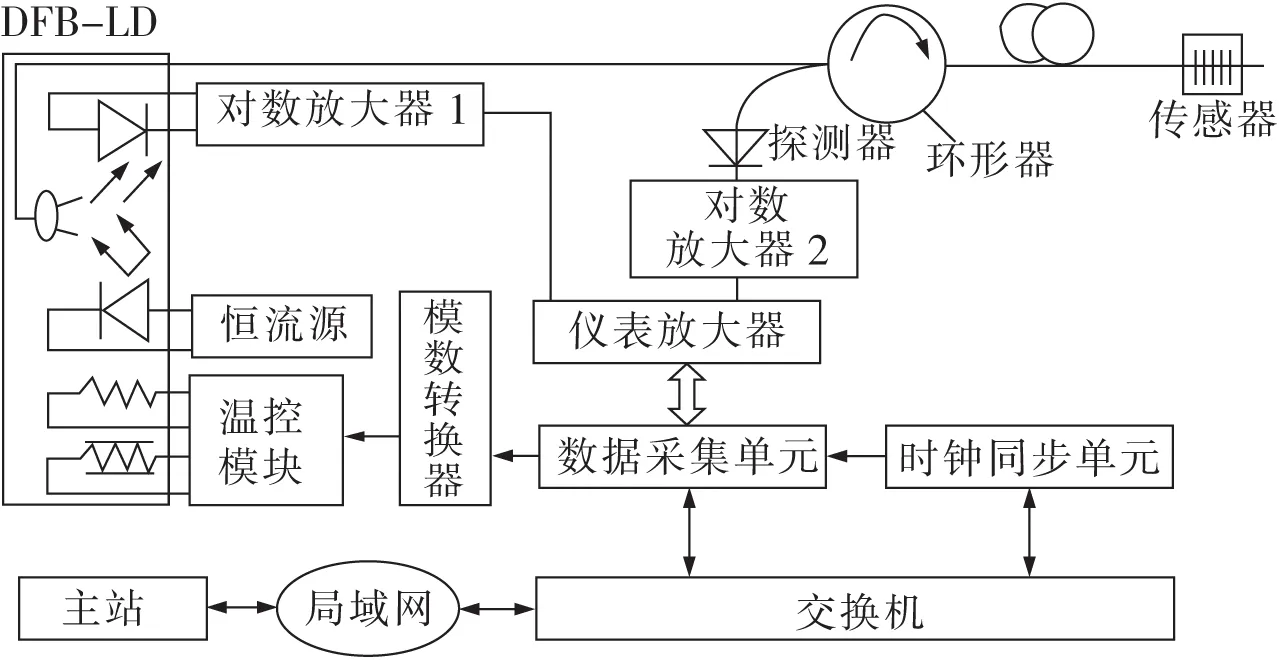
图3 光纤微震解调系统框Fig.3 Block diagram of fiber-optical microseismic demodulation system
精密恒流源驱动DFB-LD发光,并通过微处理器扫描和控制模数转换器输出一个控制电压给温控模块,用于调节激光器的温度,从而改变激光器输出波长。激光器发出的光,通过内部光电探测器和对数放大器后变为电压Vr,作为参考信号;经过环形器进入光纤光栅微震传感器,反射回来的光由光电探测器和对数放大器变为电压Vs,作为传感器检测信号;Vr和Vs经过仪表放大器进行差分运算,得到归一化信号Vn;归一化信号被数据采集单元采样,再经过反对数运算处理后,一方面,作为反馈信号进入自动控制单元,把激光器的工作点自动跟踪和稳定在光栅的其中一个斜边的-3 dB处,消除了温度等低频信号对系统的影响;另一方面,经过数字滤波处理后得到微震信号,并通过局域网传输到主站进行处理和显示。此外,时钟同步单元PTP主时钟基于硬件IEEE-1588网络对时协议设计,可为数据采集单元提供亚微秒精度的时钟基准,实现分布式微震信号高精度同步数据采集。
1.3 系统测试
本系统经过校准测试,校准器采用B&K-4808标准振动台,测试结果如图4所示。可以看出,当测试加速度为0.5 m/s2,系统的-3 dB带宽约为1~200 Hz,当测试频率为30 Hz,在10-3~10 m/s2范围内,线性度较好,动态范围达到80 dB。
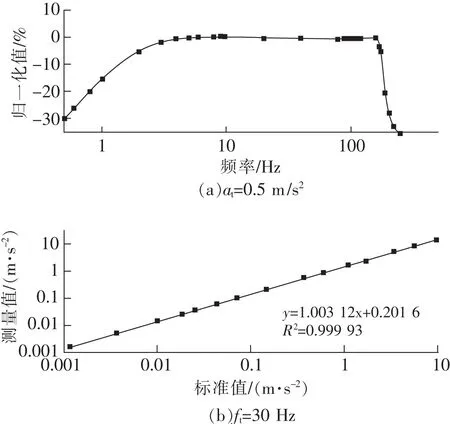
图4 光纤微震系统测试结果Fig.4 Test results of fiber-optical microseismic system
2 震源定位算法
2.1 网格搜索算法
当岩体中发生微震事件时,检波器相继探测到微震波。初至波到达时间方程如下
ri=ti-ts-Ti
(10)
式中,ri为残差值;ti为初至时刻;ts为震源发生时间;Ti为初至波到检波器的旅行时间。假定微震波传播路径是直的,并且介质是均匀的和各向同性的,则传播时间可以定义为
(11)
式中,xi,yi,zi为传感器坐标;xs,ys,zs为震源坐标;v为波速。
求解方程(11)的经典方法是线性化反演,通常采用最小二乘法,即L2范数统计,通常假设残差分布具有高斯性质。考虑到检波器的安装一般局限于井下巷道周围,时间残差往往不服从高斯分布,偶尔出现较大的残差会严重影响事件定位精度[12]。因此,将观测到的和计算的到达时间之间的绝对差的和最小化,即L1范数统计作为残差计算公式,因为它对异常值不太敏感,即有
(12)
方程(12)可以用网格搜索法求出,其具有稳健、高效以及无需求导等优点[13-14]。该方法通过对震源位置的三维矩形网格进行全局搜索来确定震源位置。如果需要更高的空间分辨率,则可以使用足够小的网格间隔进行搜索,同时在搜索过程中对震源位置坐标和原点时间施加一定边界。通过减去2个独立检波器的观测和计算的差分走时,可以消除震源时间。因此,方程(12)可以写成
(13)
这种方法更容易找到不匹配函数的绝对最小值,而不是相对最小值。避免了到达时间导数的计算,大大降低了对未知参数初始估计的敏感性。此外,采用L1范数统计标准,并从误差空间中剔除起始时间,保持了计算的简单性和速度。
2.2 定位误差测试
为了测试定位误差,在某深部煤矿13230工作面安装了5个单分量光纤微震传感器。在现场选取了10个放炮事件作为参考震源。传感器布置和事件分布如图5所示,所有事件均位于传感器阵列之外,最远距离达到300 m。
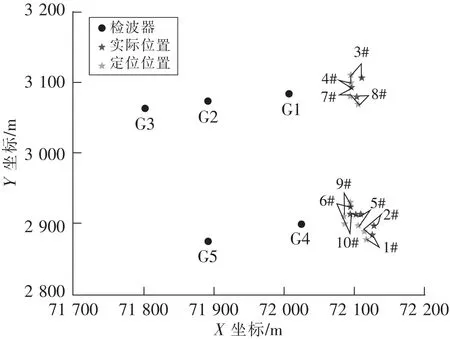
图5 定位误差测试传感器布置Fig.5 Sensor arrangement for positioning error test
定位误差测试结果见表2。可以看出,X、Y方向的平面定位误差范围为5.8~21.5 m,Z方向的垂直定位误差为9~34 m,各自的平均定位误差分别为14.8 m和18.9 m。可见,在300 m监测范围内,系统平面定位误差小于15 m。由于传感器阵列高程差较小(最大仅为50 m),导致垂直定位误差相对较大[15]。
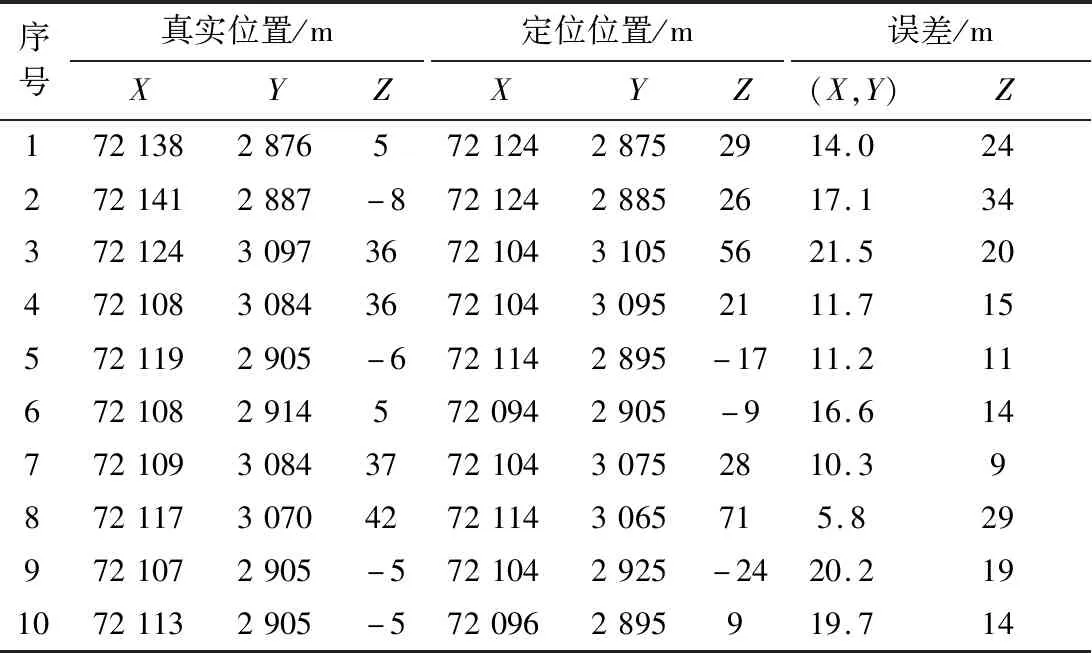
表2 定位误差测试结果Table 2 Test results of positioning error
3 现场试验与分析
3.1 试验方案
在陕西柠条塔煤矿南翼2-2煤东大巷辅运大巷和回风大巷以及北翼井田边界附近,分别安装了一套矿用光纤微震监测系统,主要包括光纤微震传感器、监测分站和监测主机。南翼监测分站放置在井下机头硐室,北翼监测分站放置在地面配电站,用于解调传输光纤微震信号;监测主机放置在井上调度室放置服务器用于远程监测、存储、数据分析及网页发布;16支光纤微震传感器和18支光纤微震传感器分别布置在南翼回风大巷及辅助运输大巷侧帮,以及北翼地表深孔,可实现南翼东大巷附近和北翼井田边界煤矿越界开采活动的实时在线监测。
南翼和北翼光纤微震传感器布置如图6所示。其中南翼相邻传感器距离平均约为100 m,构成了长约1 700 m,宽约320 m的传感器网络;北翼相邻传感器距离平均约为300 m,构成了长约2 800 m,宽约1 000 m的传感器网络。

图6 柠条塔煤矿南翼和北翼微震传感器布置Fig.6 Layout of microseismic sensors in south and north wings of Ningtiaota Coal Mine
光纤微震传感器带有深孔安装的锚爪装置,如图7所示,使用灌浆固定,保证了传感器与岩体的充分耦合,降低了背景噪声,有效提高了微震波记录质量。

图7 矿用光纤微震传感器深孔安装Fig.7 Deep-hole installation of mine fiber-optical microseismic sensor
3.2 数据分析
对某段时间的微震事件进行统计分析,研究了井田边界井下开采活动的变化趋势。2019年10月18日至2020年2月29日微震事件的分布情况,如图8所示。
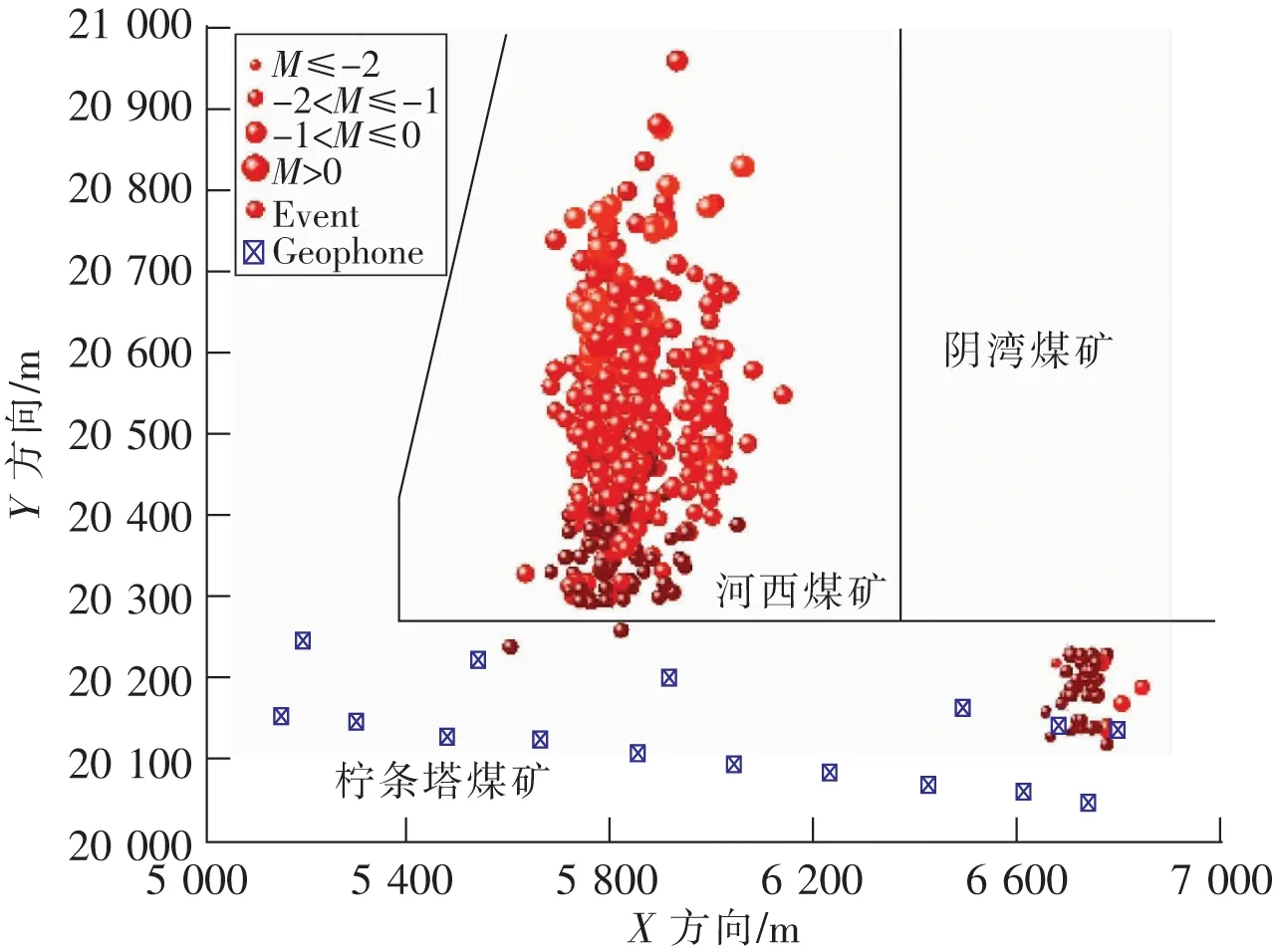
图8 2019年10月至2020年2月间微震事件分布Fig.8 Distribution of microseismic events from October 2019 to February 2020
经统计分析,此期间共有509个有效事件,震级分布在-2.14~0.98之间。这些事件大多位于井田边界之外,相对集中在一个长约400 m、宽约300 m的区域。据了解,河西煤矿正在向深部开采,受开采影响,上覆岩层发生崩塌,导致微震事件频繁发生,且分布较分散。此外,只有少量震级为-1.0或更小的事件位于井田边界内,相对集中在一个长约100 m、宽约50 m的区域,其中某个典型事件微震波形及频谱图如图9所示。
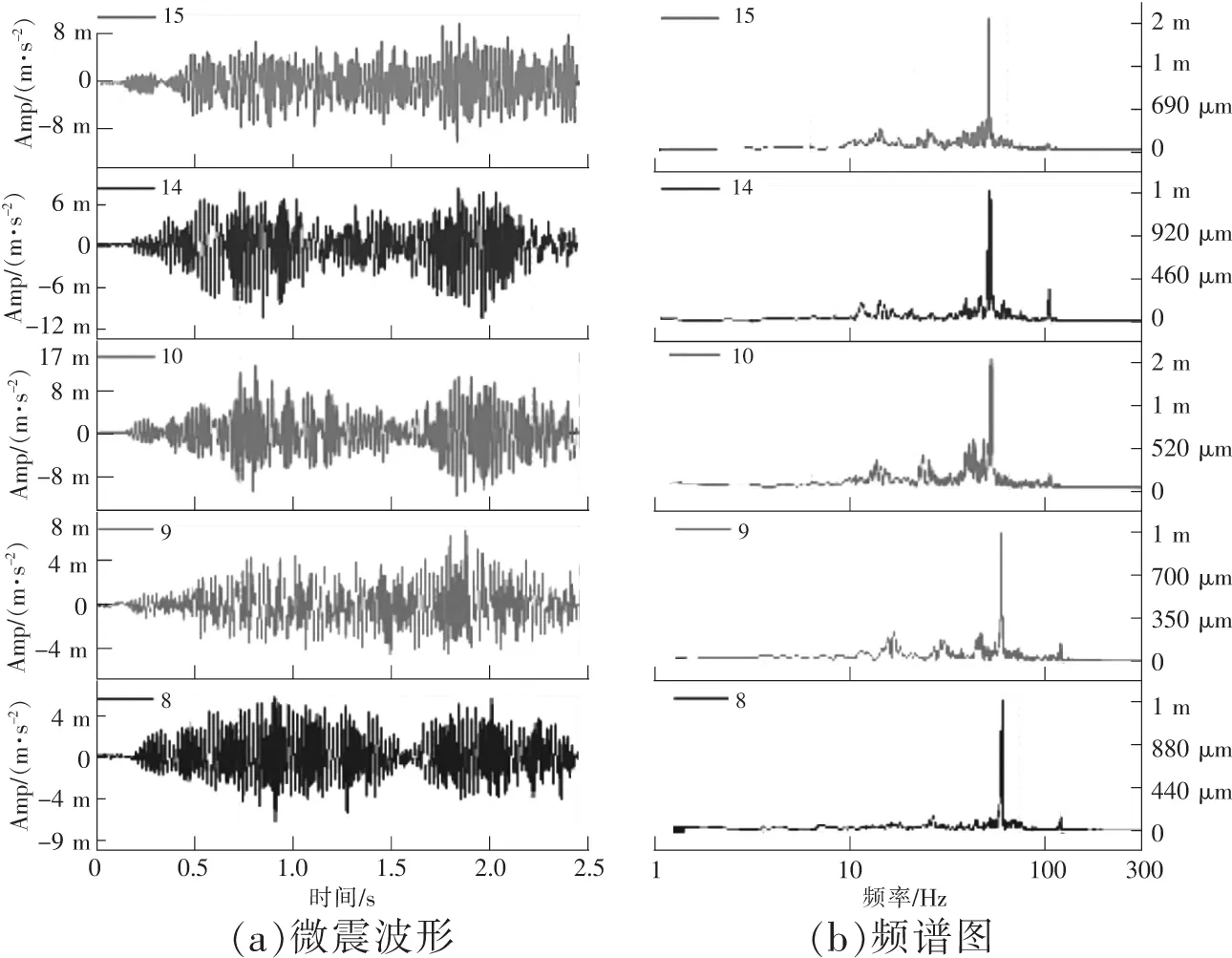
图9 机械作业微震波形及频谱图Fig.9 Microseismic waveform of and spectrum mechanical operation
经频谱分析,该信号主频约为50 Hz,持续时间可达几分钟。据了解,当时此区域井下有一些机械作业,如井下钻探、凿岩、安装锚杆等。由此可见,在监测期间,邻近煤矿在其区域内开采煤炭,而在边界内发生的机械作业与采矿无关,从而实现了对煤矿井田边界井下开采活动的有效监测和识别。
4 结论
(1)基于悬臂梁结构和光纤光栅技术,研发了新型实用高灵敏度光纤微震传感器,利用窄线宽分布反馈激光器波长自动跟踪解调技术,结合基于L1范数统计的网格搜索定位算法,创建了大范围高精度煤矿防越界开采光纤微震监测系统。
(2)充分发挥了光纤传感技术本质安全、抗电磁干扰、灵敏度高等技术优势,实现了对煤矿井下开采活动微震事件的实时在线监测和精确定位,特别适用于煤矿井下易燃易爆、强电磁干扰恶劣环境。
(3)系统在陕西柠条塔煤矿的示范应用表明,系统能够准确判断是否有越界开采情况发生,有效运行并实现了预期目标,为煤矿防越界开采监测预警提供了有力的技术支持。
