基于流体涡旋向心吸力的改进型水面垃圾回收装置*
2021-06-03郑烁桐颜健锋李伟杰谢洪鲸张淑瑶黎亦文
郑烁桐,颜健锋,李伟杰,谢洪鲸,张淑瑶,黎亦文,马 颖*
(1.广州大学 物理与材料科学学院,广东 广州 510006;2.广州大学 电子与通信工程学院,广东 广州 510006)
我国有许多大型水电站和水库,在很多旅游景点和娱乐场所也都建造了人工湖。由于一次性包装食品的大量生产和消费等原因,致使江、河、湖泊、水库上漂浮大量垃圾,引发严重的生态问题,尤其是航运河道、发电站前池,若不及时清理,将会影响航道运行、发电机组正常运转。因此,不少水面垃圾清理机器船应运而生。国内外清理水面漂浮垃圾的设备及方法大致可分为:悬臂式安装和机械格栅,但都存在结构复杂、成本较高、安装难度大、清理能力有限等缺点。人工清理垃圾的方式效率低下,安全性能不高。在一些景点的河道常会有小型漂浮垃圾,为了维持景点水面的清洁,清洁工人需要花费大量时间在河道内清洁垃圾,不但浪费大量人力、物力和财力,也影响景点的美观。
为克服水面清理机器船结构复杂、清理难度大和效率低等一系列问题,秉承“绿色环保、节能便捷”的理念,以流体力学、机械结构设计、远程控制等作为理论基础,并结合软硬件技术,本团队设计了一款涡旋式改进型水面垃圾回收装置。该装置能高效安全地实现全天候的打捞水面漂浮垃圾工作,能节约并有效利用资源,具有结构简单、活动灵活的特点。
1 设计思路
针对现有的水面垃圾回收装置存在的缺点或不足,本装置通过设计对称分布的稳定浮舱使设备稳定地漂浮在水面上,浮舱的四点分布以及将各浮舱与设备主体的衔接设计在水面以下,使承担回收工作的设备主体与工作水域有更为广阔的水面接触范围,使其可以吸纳更多方位的水面垃圾,提高工作效率。在设备主体与水面接触的位置设计导流片,使流入设备的水流更快地形成水面涡旋,增大其在吸收范围内产生向心吸力。在装置工作中,本装置通过单片机结合红外线感应装置的设计,由红外线感应装置对工作水面有无垃圾作出判断,从而决定装置所处于工作或待机状态,以减少过多运行能源的浪费。同时,本设计以继电器作为单片机控制各个动作的媒介,使得装置整体的感知部分、控制部分、动力部分以及供电系统单元化、模块化,这使得装置在投入使用后的后期维护更加方便[1-5]。此外,浮舱作为保留的拓展平台,为装置保留了一定的可拓展创新的空间,这使该装置对适应多种环境保留了更多的改造可能,使其更具有实用价值。
装置设计概念图如图1 所示。

图1 装置设计概念图
2 设计原理
在流体力学中,涡旋尚没有明确的严格定义,但涡量有严格的数学定义,即定义为速度的旋度ω→=▽×v→。流体的涡旋运动被定义为:在流场的某一区域中,如ω≠0,称在这个区域中流体是有旋的,也称为涡旋运动[6]。自然界中涡旋的产生主要是因为地转偏向力的存在,物体在地球表面垂直于地球纬线运动时,由于地球自转线速度随纬度变化而变化,由于惯性,物体会有保持原来相对地面的速度的运动方向趋势,这就叫地转偏向力。地转偏向力使水流速度的旋度不为零,即产生了涡量,形成涡旋。本装置以水流产生涡量为理论依据,利用导流片、底部漏斗及水泵给予装置周围水面一个“人工偏向力”,巧妙地实现了涡旋的人工产生和涡旋可视,进而利用涡旋产生的向心吸力实现垃圾回收的目的。
本装置利用安装在圆柱环壁表面的导流片使装置四周水流流入装置时获得切向速度,同时底部漏斗下的水泵启动,给水流一个向下的吸力,水流涡量不为零,形成涡旋,水面垃圾被涡旋产生的向心吸力吸引,随水流流入装置,被装置内的滤网拦截,水泵不断将水抽出装置外,使涡旋可持续。
在本装置完成设计的垃圾回收动作时,需要通过单片机对潜水泵和齿轮电机的启动和停止时间进行精准控制,而单片机是一个弱电器件,一般情况下其工作电压为5V 甚至更低,驱动电流在mA 级以下。在面对本装置选用硬件中工作电压为12V 且功率为数十瓦的电动机时,单片机的IO 口驱动能力不足以驱动潜水泵中电动机和设计所用的齿轮电机,因此,可通过直接驱动继电器或利用ULN2003A 驱动芯片来驱动继电器。
光耦继电器是用光耦来控制开光状态的固态继电器。一般继电器都是机械触点,靠通电流过线圈变成有磁性的磁铁吸合触点,从而控制开关状态。而光耦继电器工作原理类似于光电耦合器。此类继电器广泛应用在电子设备、仪器仪表及自动化设备中。在各种自动控制设备中,都要求用一个低压电路控制一个高压电路,如常作为单片机外围设备的继电器可完成5V 对12V/24V 的电动机电路的控制,故本装置通过单片机控制继电器进而控制电源与电动机之间的通断,以达到对电动机进行控制的目的。
3 设计方案
3.1 装置的结构设计
装置由主体舱、圆柱环壁、稳定浮舱及硬件系统四部分组成,全长700mm,宽700mm,高350mm。装置各主要组件结构如图2 所示。

图2 各主要组件结构图
(1)主体舱
主体舱本身作为吸纳水面垃圾的工作主体,采用ABS 树脂材料制成,长206mm,宽206mm,高150mm,如图2 所示。主体舱内部分为收集舱、密封舱两个部分。收集舱上沿外侧有与圆柱环壁内侧相咬合的凹螺旋卡槽。收集舱对称圆柱体的结构使整个装置在水中所受压力对称,也更有利于舱内涡旋的产生和保持,如图3 所示。收集舱底部为漏斗型,包含螺旋桨的涡旋产生结构,如图4所示。螺旋桨下方漏斗底部与止回阀相接,止回阀作用是使舱内的水量可由止回阀下方潜水泵的抽水量控制。

图3 收集舱

图4 底部漏斗结构
漏斗型垃圾滤网位于收集舱上端舱口,其底部中央有一漏口,水面垃圾一旦被涡旋经该漏口吸入收集舱便不会再漂出水面,避免反复收集同一垃圾而浪费资源。底部潜水泵的作用是将装置内的水从底部抽至装置外,是使水面产生涡旋的同时使涡旋可持续的关键。
位于收集舱漏斗型底部以下的密封舱内设有12V锂电池组为装置提供主要动力,以及操控装置完成工作的单片机及其电路系统。
(2)圆柱环壁
圆柱环壁长213mm,宽213mm,高120mm,如图5 所示。圆柱环内壁的凸螺旋卡槽设计与主体舱外壁的凹卡槽准确咬合,构成螺旋卡扣;外壁带有由履带构成的锯齿条纹与对称安装在主体舱上的三个齿轮电机紧密咬合。这样的设计使得圆柱环壁可在电机的带动下紧贴着主体舱上下螺旋转动,使装置可以在高于水平面和低于水平面两个状态来回切换,机械效率高。当环壁螺旋下降至低于水平面时,水流流入装置,产生涡旋、吸引垃圾;当环壁螺旋上升至高于水面时,隔离水面,使被吸纳在过滤网以下的垃圾不再漂出。

图5 圆柱环壁
圆柱环壁上端带有对称均匀分布的导流片,作用是给水流一个切向速度、配合在底部水泵产生抽水吸力的同时产生涡旋现象,吸引水面垃圾流入装置内的滤网中。
(3)稳定浮舱
稳定浮舱以主体舱为中心,呈水平正矩形四点分布,每个浮舱均用PVC 硬管与主体舱的中下部在水面以下牢固衔接,为装置的整体提供浮力。在保证主体舱在水中保持竖直的工作状态的同时,浮舱与主体舱在水面保持一定距离,使主体舱舱口四周360°均被水面环绕。这一设计的目的在于使水面各方位流入主体舱的水流流量相同,在水面涡旋产生的同时,最大程度地让涡旋产生地水面吸力能够吸纳更多方位的水面垃圾,使产生的涡旋吸力工作效率达到最大化。四个浮舱的分布设计,让装置在水中保持着一个较为稳定的位置状态,使其更好地在不同的天气、不同的水域环境中工作。除了在浮舱上方安装判断水面无垃圾的红外线传感器之外,浮舱内的闲置空间为后续装置的改造保留了拓展的空间,例如可拓展更多的蓄电池,也可结合应用环境搭载太阳能电池板或海浪发电机使设备实现能源自给自足,这使装置存在面对不同环境可针对性作出优化方案的可能,从提升环境适应能力的角度提升了其实用性。
装置实物图如图6 所示。

图6 装置实物图
3.2 装置的硬件设计
齿轮电机:设计选用3 台做过防水处理的22W 直流齿轮电机,额定电压为12V,空转转速为300r/min。
单片机:设计选用STC89C51 单片机,是STC 公司生产的一种低功耗、高性能的8 位微机,内有4K 字节的用户应用程序空间,2 个16 位定时器/计数器及2 路外部中断,借此我们通过编写片内程序使单片机控制各组件完成装置工作中的各个动作。
直流潜水泵:设计选用80W 的直流潜水泵,额定电压为12V,最大抽水流量达5000L 每小时(即约1.39L/s)。
红外线传感器:设计选用带有LM393 比较器的红外线测距传感器,通过设置比较器调整测距距离,在所设距离内存在障碍物(水面垃圾)时,向单片机发送信号。
继电器:设计选用带光耦隔离的常闭继电器,工作电压为直流5V。选用不同组的继电器的常闭负载端分别将12V 直流电源模块和齿轮电机以及直流潜水泵相接,在接收到单片机向其输出的高电平期间,负载端之间通路,使对应用电器通电运行。
蓝牙模块:设计蓝牙模块选用HC-05,可通过手机APP 的蓝牙功能实现与单片机直连,通过蓝牙无线控制单片机以控制装置的正常工作和强制待机状态,实现在投放使用和回收维护时对装置整体的开关机。
电源模块:设计选用四组均为8400mAh 的12V 锂电池组组成电源电池组,向潜水泵、电机提供直流12V 电源以外,通过降压电阻电路向单片机、蓝牙模块、红外传感器等组件提供5V 电源。
各硬件所连接情况如图7 所示。

图7 硬件接线图
4 工作过程
将通电后被强制待机的装置放置在指定水域,装置漂浮于水面上,通过蓝牙无线控制唤醒装置,使装置处于待机状态,当安装在浮舱上的红外线感应装置感应到装置四周在一定工作范围内的水域有水面垃圾时,装置进入回收工作状态,齿轮电机带动圆柱环壁螺旋下降,使装置圆柱环壁上沿低于水平面,主体舱口边缘的水流入主体舱,同时主体舱底部直流潜水泵将过滤后的水抽出主体舱,保证舱内外水位差的可持续性。此时,流入主体舱的水流经过舱口导流片后产生液面涡旋,涡旋产生液面向心引力,吸引水面垃圾,与水流一起流入主体舱的垃圾流入舱中漏斗型垃圾滤网以下,并在滤网防止其再次漂浮的情况下存储在滤网以下的主体舱中的收集舱部分。一次作业结束后,电机反转带动圆柱环壁螺旋上升,使主体舱内部与水面隔离,水泵抽出主体舱内一部分的水使装置吃水线下降至回收工作前的大致位置。此时,装置重新回到待机状态继续漂浮在水面上,等待红外线感应装置发来下一次回收工作的信号,或者等待维护人员通过蓝牙无线控制来强制待机后进行清理维护。
实物工作效果图如图8 所示。
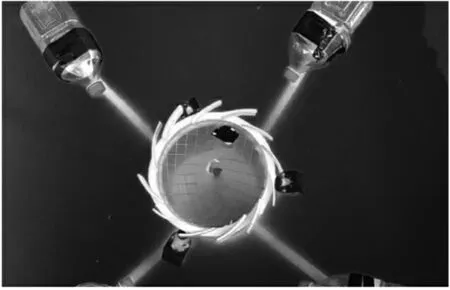
图8 实物工作效果图
5 结束语
本文介绍了一款自行设计制作的基于流体涡旋向心吸力的改进型水面垃圾回收装置及其基本工作原理、设计制作过程与工作过程。已完成制作的装置设计思路巧妙,实现了全自动产生可视的涡旋,并将涡旋应用于水面垃圾收集这一环保领域,创新性强,改善了现有水面垃圾回收装置存在的工作效率低、适应场景单一、高耗能的不足。装置以低廉的制作成本实现全自动环卫功能,性价比较高。