市域轨道交通中的全自动运行需求
2021-06-01马向东
马向东
(温州市铁路与轨道交通投资集团有限公司运营分公司, 325014, 温州∥工程师)
近年来,随着上海轨道交通10号线实现UTO(无人值守的列车全自动运行),以及国内首条自主化的全自动运行线路——北京燕房线的开通运营[1],越来越多城市的建设单位认识到全自动运行技术给城市轨道交通行业所带来的“降本增效”效应。全自动运行线路可以节省大量的运营人员,降低线路开通运营后的人力资源成本;同时,全自动运行线路通过系统设备来提高运营效率,可增加旅客的运送量,缓解城市轨道交通在早晚高峰期的运输压力。随着全自动运行技术在城市轨道交通中的应用普及,目前国内在建和报规的全自动运行项目已超过40条线路,总里程已超过1 000 km。
为了进一步加快“城市化”的建设步伐,实现城市中心城区与外围新城或组团城区之间的经济共同体效应,并完善我国轨道交通运输体系,市域轨道交通的概念应运而生。相比城市轨道交通而言,市域轨道交通具有单一线路长、站间距大、速度目标值较高、公交化运营[2]等特点,并且具备拉大城市框架、促进城区经济发展、实现“1小时都市圈”等功能需求。
那么,市域轨道交通该如何建设,是否需要配备全自动运行系统,或者市域轨道交通需要配备何种自动化层级的全自动运行系统,成为了近年来业内专家、学者们的讨论重点,也成为了市域轨道交通报规和报建的重要问题。
1 市域轨道交通的特点
1.1 工程特点
1) 线路里程长、平均站间距大[3]。市域轨道交通的单一线路建设里程约30~70 km,平均站间距约3~10 km。
2) 速度目标值和旅行速度较高。速度目标值一般为120~160 km/h,旅行速度一般不低于65 km/h。
3) 初、近期运营间隔较大。初、近期运营间隔约5~10 min,但系统能力一般按照2.0~2.5 min设计预留。
4) 交流牵引、电分相。部分市域轨道交通采用AC 25 000 V的交流牵引供电制式,那么必然存在电分相(即无电区)。
5) 高架线和高架站占比大。市域轨道交通大多采用高架线敷设方式,车站形式以高架站为主。
1.2 建设运营成本特点
根据上述市域轨道交通的工程特点,其线路在投入运营的初、近期,一般均处于城镇外扩和沿线客流培养阶段,对于线路运营能力的需求相对较低。因此,初、近期的配属车辆较少,段场规模较小,初始工程投资相对较低。
另外,市域轨道交通线路较长,一般延伸至远郊,运营人员的日常通勤相对不便,人员的招聘和管理难度相对较大。因此,为了满足正常运营需求,其相应的运营、维保人员的薪资待遇相对较高,导致人力成本上升。尤其针对三四线城市,其城市本身对于人才的吸引力较弱,往往需要提供高于当地平均薪酬待遇的薪资水平才能招聘到合适的运营、维护人员,从而导致线路开通运营之后,人力成本成为运营公司的重要开支之一。
综上,市域轨道交通工程对于全自动运行系统的需求,一般在线路开通运营的初、近期,也就是在机电设备第一轮的生命周期内,其需求重点往往不在于提高线路运营能力的“增效”方面,主要在于全自动运行系统可以有效降低运营、维护人员的定员,从而降低人力资源开销。
2 轨道交通自动水平等级定义
2.1 传统定义
UITP(国际公共交通协会)将轨道交通列车的GoA(自动化水平)划分为五级,常见的有GoA1—GoA4[4](如图1所示)。其中,GoA3和GoA4为全自动运行系统,且均不配备专职司机;在GoA3层级下,对于关闭车门和故障情况下的运行,由多职能乘务员来操作和处理,在GoA4层级下,所有操作均由系统设备来完成。
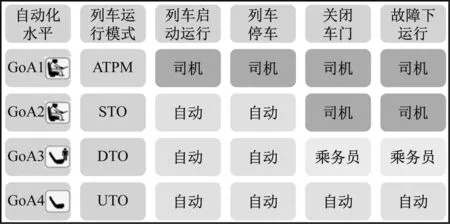
注:ATPM为人工列车自动防护;STO为半自动列车运行;DTO为有人值守的列车全自动运行;UTO为无人值守列车全自动运行。
2.2 国内定义
针对国内城市轨道交通既有情况,特别是北上广深和部分省会城市的特大客流、高密度运营需求、超短应急响应时间需求等特点,以及“传统定义”在国内轨道交通运营场景中面临的问题,中国城市轨道交通协会在IEC 62290-1—2014的基础上提升了自动化水平等级的功能要求,提出了“GoA3+”的概念,如表1所示。

表1 国内轨道交通自动化水平等级定义表
正常运行情况下,GoA3+和GoA4并无区别,所有操作均有设备完成,只是在故障场景下人工介入处理应急响应。其功能执行情况如表2所示。相比GoA4,在某些必须人工上车干预的故障场景下,GoA3+的应急响应时间较短,此模式更加有利于大客流、高密度的全自动运行线路工程。
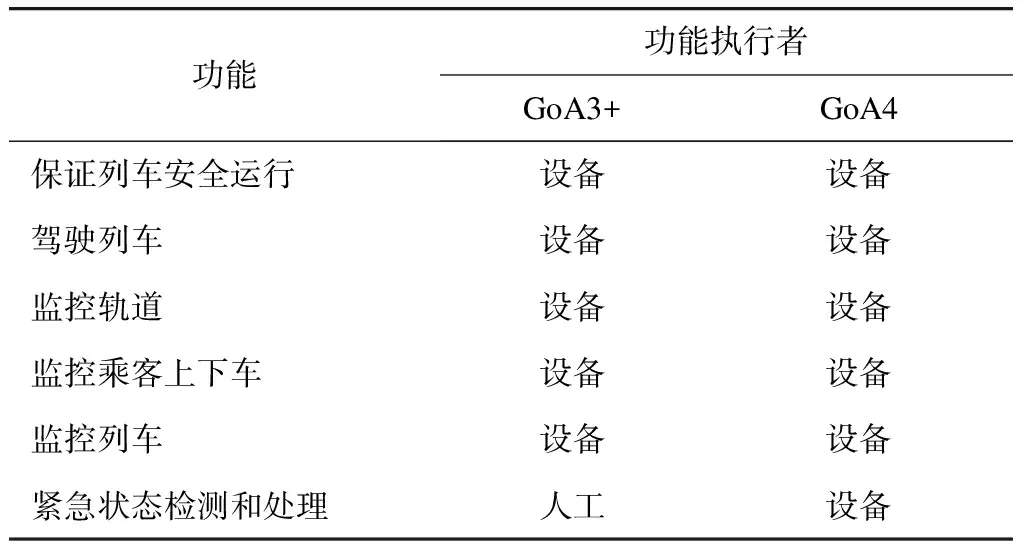
表2 GOA3+与GOA4的功能执行对照
3 市域轨道交通的全自动运行
随着各类轨道交通自动化水平的不断提高,以及市域轨道交通的建设运营特点,全自动运行系统在市域轨道交通中的应用必将成为行业趋势。鉴于市域轨道交通的工程特点区别于传统城市轨道交通,故市域轨道交通在运营初期,对于自动化等级,以及自动运行功能需求方面应适应市域工程的特殊性和市域线路的功能定位。
3.1 自动化等级方面
针对市域轨道交通线路里程长、平均站间距大等特点,意味着一旦列车故障停在区间,若车上没有多职能乘务员,那么司机必须从就近车站赶至区间故障列车,从而导致救援时间更长。
另一方面,鉴于初、近期运营间隔较大等特点,也意味着线路上客流量不高,其故障应急响应时间可以适当延长。
地方业主应充分权衡对于人工救援时间和故障应急响应时间的承受能力,以及运营人力资源成本负担能力,对于确定采用全自动运行系统的市域轨道交通项目,对其自动化水平等控制等级的建议如下:
1) 市域轨道交通的工程建设,均应按照GoA4标准执行,设备配置按UTO模式配置。
2) 对于一二线城市,或工程沿线客流培养迅速的工程项目,其线路开通运营时可以采用GoA3或GoA3+的DTO运行模式,或GoA4的UTO运行模式;当机电设备性能趋于稳定和客流增长到一定程度之后,高峰期可以采取GoA3+的DTO运行模式,平峰期和低峰期采用GoA4的UTO运行模式,从而均衡运营效率和人力资源配置。
3) 对于三四线城市,或工程沿线客流培养速度较慢的工程项目,其线路开通运营时,可以在运营准备充分、救援管理措施完善的前提条件下,直接采用GoA4的UTO运行模式,最大化减少运营之后的人力资源成本。
3.2 自动运行功能方面
目前,各地建设全自动运行城市轨道交通项目的各个参与方,均对全自动运行的场景分析和系统功能分析做了较为深入的研究,并形成了一定的结论;与此同时,中国城市轨道交通协会也即将发布《城市轨道交通全自动运行系统》的行业规范性文件,作为工程的建设依据。
然而,市域轨道交通的工程特点区别于城市轨道交通,可以在较为成熟的城市轨道交通全自动工程运营需求(含场景分析)、功能需求、接口需求的基础上,针对市域轨道交通的特殊性进行针对性的调整。例如:
1) 市域轨道交通以高架线路为主,平均站间距大,则既有的全自动系统运营场景和相关联动功能可适当精简,并根据高架线路的特殊性(例如跨海、跨湖、跨山谷等特殊地段)分析并制定针对性的运营保障措施、特殊故障场景的联动功能和响应机制等。
2) 交流牵引制式的市域轨道交通工程存在“电分相”区域[5],应针对“电分相”所带来的正常行车和故障救援问题,增加相应的运营需求、运营场景和系统功能的联动机制。
3) 市域动车组内部的系统配置和功能架构有别于城市轨道交通车型,为了满足市域轨道交通的全自动运行需求,市域动车组也应根据全自动运营需求,增加相应的系统功能和配套设备。
4) 其他系统专业,例如信号、通信、综合监控、站台门、FAS(火灾报警系统)/BAS(环境与设备监控系统)等,均应结合市域轨道交通的工程特点和全自动运营需求,做出相应的调整;并配合全套机电、车辆、土建等专业,有针对性地完善并优化系统间的联动机制和运营维护管理机制,真正实现市域轨道交通的全自动运行。
4 结语
综上所述,随着自动化技术的进步,市域轨道交通配置自动化运行系统的技术方案势在必行。本文针对市域轨道交通工程的特殊性,结合工程自身在城市运输系统中的功能定位,对其工程的自动化水平等级和特殊的运营场景给出了相关建设方案,为工程运营后期真正实现“降本增效”提出了可行性建议。
