EPS系统传感器角度信号静态标定及算法解析
2021-05-31宋昌平侯训波刘晓文毕名辉邵阳
宋昌平,侯训波,刘晓文,毕名辉,邵阳
(1.大连职业技术学院,辽宁大连 116037;2.大连创新零部件制造公司,辽宁大连 116620;3.河北中兴汽车制造有限公司,河北保定 071000;4.辽宁曙光汽车集团股份有限公司,辽宁丹东 118000)
0 引言
现代汽车配装电动助力转向系统(EPS系统)已非常普及。角度传感器作为EPS系统的核心部件之一,直接影响系统性能,其角度信号对于实现主动回正等功能又是必不可少的[1],甚至高端车辆的线控转向系统采用了双转角传感器[2-3],可见其重要程度。此外ESP等底盘电控系统也需要与EPS共享角度信号,来完成各自控制功能,从而实现底盘一体化控制[4]。目前,EPS系统传感器较多地采用了非接触式,其输出角度信号也采用了占空比PWM形式,它具有较强的抗干扰能力,被广泛应用。为使角度传感器能准确且可靠地被EPS系统应用,来测量方向盘转角,需对其角度信号进行标定,该标定是指EPS系统生产厂家针对传感器本身进行的,也是文中的研究对象。它既不同于传感器厂商对其灵敏度、线性度、迟滞性等参数标定[5],也不同于EPS系统在整车上的零位角度标定[6]。通常传感器角度信号标定分为静态标定和动态标定,其中动态标定能较好地消除系统匹配误差,但标定过程较复杂、效率较低,而静态标定是生产厂家通常采用的方法,效率较高,也能满足大部分EPS系统所应用场合的误差要求。鉴于此,本文作者针对Hella传感器的静态角度信号,开展了相关标定方式及算法的分析和研究,供EPS系统工程师应用参考。
1 传感器工作原理和角度信号特性
文中研究的EPS系统传感器为Hella非接触交变电磁感应式的扭矩转角传感器,如图1所示,它除了能输出扭矩主信号T1和副信号T2,还能输出与角度相关的主信号P和副信号S,均为PWM占空比形式的信号,这些信号是经过传感器内置IC计算处理后成为可用的信号,再传输到EPS系统控制器(ECU),参与系统工作。其中PWM_Py/Sy/T1y/T2y是未经标定处理前的角度主信号/角度副信号/扭矩主信号/扭矩副信号,也是传感器的原始信号,在EPS系统工作时,传感器内置IC直接采样也是这些原始信号。
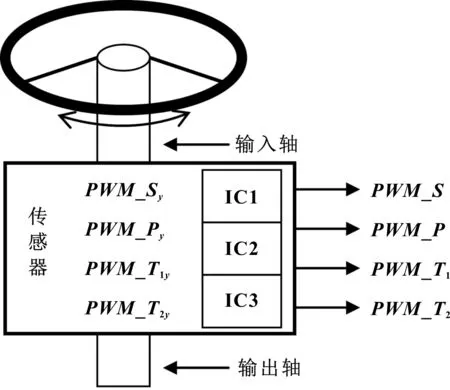
图1 传感器工作原理简图
上述未标定前的原始信号,是在传感器初始化后即可产生的PWM信号,其中与角度相关的PWM_Py信号为40°一个循环,共37个周期,PWM_Sy信号为296°一个循环,共5个周期,综合角度范围为1 480°,且PWM_Py和PWM_Sy信号每个循环的有效PWM数值范围均为12.5%~87.5%[7]。
如图2所示的传感器各信号特性,是在EPS系统中处于自由静态未标定前的状态。
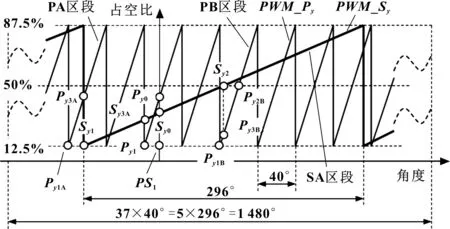
图2 未标定前的原始角度信号特性示意
当前静态位置时的PWM_Py和PWM_Sy信号点定义为静态标定初始点Py0和Sy0,其信号值为PWM_Py0和PWM_Sy0,将被IC采样获得。其中Sy0点所在PWM_Sy特性区段的PWM_Sy=12.5%、50%二个特征点,定义为Sy1(PWM_Sy1=12.5%)、Sy2(PWM_Sy2=50%);Py0点所在PWM_Py特性区段的PWM_Py=12.5%特征点,定义为Py1(PWM_Py1=12.5%);当前静态位置时PWM=12.5%点定义为PS1;Sy1点所对应PWM_Py特性区段定义为PA区段,PA区段中PWM_Py=12.5%特征点定义为Py1A(PWM_Py1A=12.5%),在PA区段中与Sy1点同角度位置所对应PWM_Py特征点定义为Py3A(其值为PWM_Py3A);Sy2点所对应PWM_Py特性区段定义为PB区段,PB区段中PWM_Py=12.5%、50%两个特征点,定义为Py1B(PWM_Py1B=12.5%)、Py2B(PWM_Py2B=50%),在PB区段中与Sy2点同角度位置所对应PWM_Py特征点定义为Py3B(其值为PWM_Py3B);Py1点所对应PWM_Sy特性区段定义为SA区段,在SA区段中与Py1点同角度位置所对应PWM_Sy特征点定义为Sy3A(其值为PWM_Sy3A)。
如图2所示,在任何一段1 480°角度范围内,若划分0~1 480°角度刻度,则任意角度点均存在唯一PWM_Py和PWM_Sy信号组合与其对应,即可表示为θ=f(PWM_Py,PWM_Sy),若超出了1 480°范围后则会出现重复信号组合。
2 角度信号标定
上述传感器原始角度信号PWM_Py和PWM_Sy的组合,尽管可以在1 480°角度范围内一一对应角度点,但不同传感器被EPS系统装配后的PWM_Py和PWM_Sy特性曲线,其相对角位置关系是随机被固定的,没有统一基准,此时的原始角度信号若直接输出,则是不可用的,也无法被ECU识别并计算角度,因此需要对装配后的传感器原始角度信号进行标定。标定后,由传感器内置IC建立虚拟的PWM_P和PWM_S信号与原始角度信号对应,使其具备统一的特性曲线相对角位置关系,标定后传感器输出信号则为新构建的有统一基准的PWM_P和PWM_S信号,是可用的角度信号,其目标特性曲线如图3所示,此时ECU通过适当的算法就能对角度进行识别了。

图3 标定后输出角度信号的目标特性曲线
如图3所示,标定后输出角度信号的目标特性曲线具有3个明显的特征点,分别为PWM_P=PWM_S=12.5%重合点,PWM_P=PWM_S=50%重合点,PWM_P=PWM_S=87.5%重合点,且此3个特征点是同时存在的,其中任一特征点均可作为基准点。因此,只要对原始角度信号PWM_Py和PWM_Sy特性曲线,由外置设备计算出平移调整的角度值,使其中一个特征点满足要求,再以PWM差值形式存储到传感器内置IC中,该过程即为角度信号标定。根据PWM_Py和/或PWM_Sy特性曲线的角位置平移,以及重合点位置,则角度信号的标定方式有多种,其中较容易实现的有9种,如表1所示。
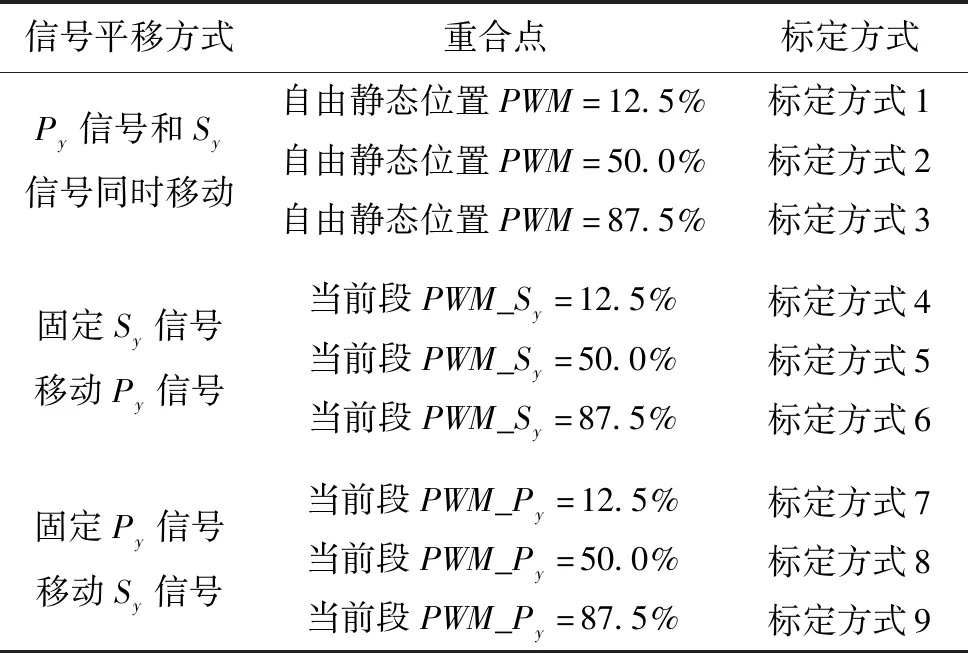
表1 角度信号的标定方式
3 典型标定方式的补偿算法
标定之后,传感器内置IC每次采样PWM_Py和PWM_Sy时,用所得PWM差值按相应的数学表达式对其进行补偿,该表达式称为补偿算法,它将在EPS系统工作中,由传感器IC实时运算处理。根据表1所列的标定方式,所对应补偿算法也各不相同,其中典型标定方式1、4、5、7的补偿算法解析如下。
3.1 Py和Sy双移至PWM12.5%重合标定——标定方式1
该标定代号为方式1,其基本原理如图2所示,是将PWM_Py和PWM_Sy的特性曲线同时向右平移,使Py1点和Sy1点同时与PS1点重合,即可由IC建立如图4所示新的虚拟特性曲线PWM_P和PWM_S(虚线部分)。

图4 Py和Sy双移至PWM12.5%重合标定特性曲线示意
如图4所示,PWM_Py特性曲线向右平移角度为θp时,可使Py1点与PS1点重合,引起当前静态位置PWM下降并产生差值为ΔPWM_P;PWM_Sy特性曲线向右平移角度为θs时,可使Sy1点与PS1点重合,引起当前静态位置PWM下降并产生差值为ΔPWM_S。
根据当前静态位置时的IC采样值:PWM_Py0和PWM_Sy0,由外置设备可计算出PWM_Py和PWM_Sy向右平移调整的角度θp和θs值及PWM差值ΔPWM_P和ΔPWM_S如下。
平移角度θp和θs表达式:
(1)
对应θp和θs的PWM差值表达式:
(2)
根据上述所得ΔPWM_P和ΔPWM_S,被IC存储后,再由IC按以下算法对原始角度信号采样值进行补偿,即可获得新构建的输出信号PWM_P和PWM_S。
新构建PWM_P信号的补偿算法:
(3)
新构建PWM_S信号的补偿算法:
(4)
3.2 单移Py至PWM_Sy12.5%重合标定——标定方式4
该标定代号为方式4,如图2所示,此标定方式是在PWM_Sy特性曲线位置不变的情况下,仅将PWM_Py特性曲线向右平移,使Py1A点与Sy1点重合,即可由IC建立如图5所示新的虚拟特性曲线PWM_P(虚线部分)。
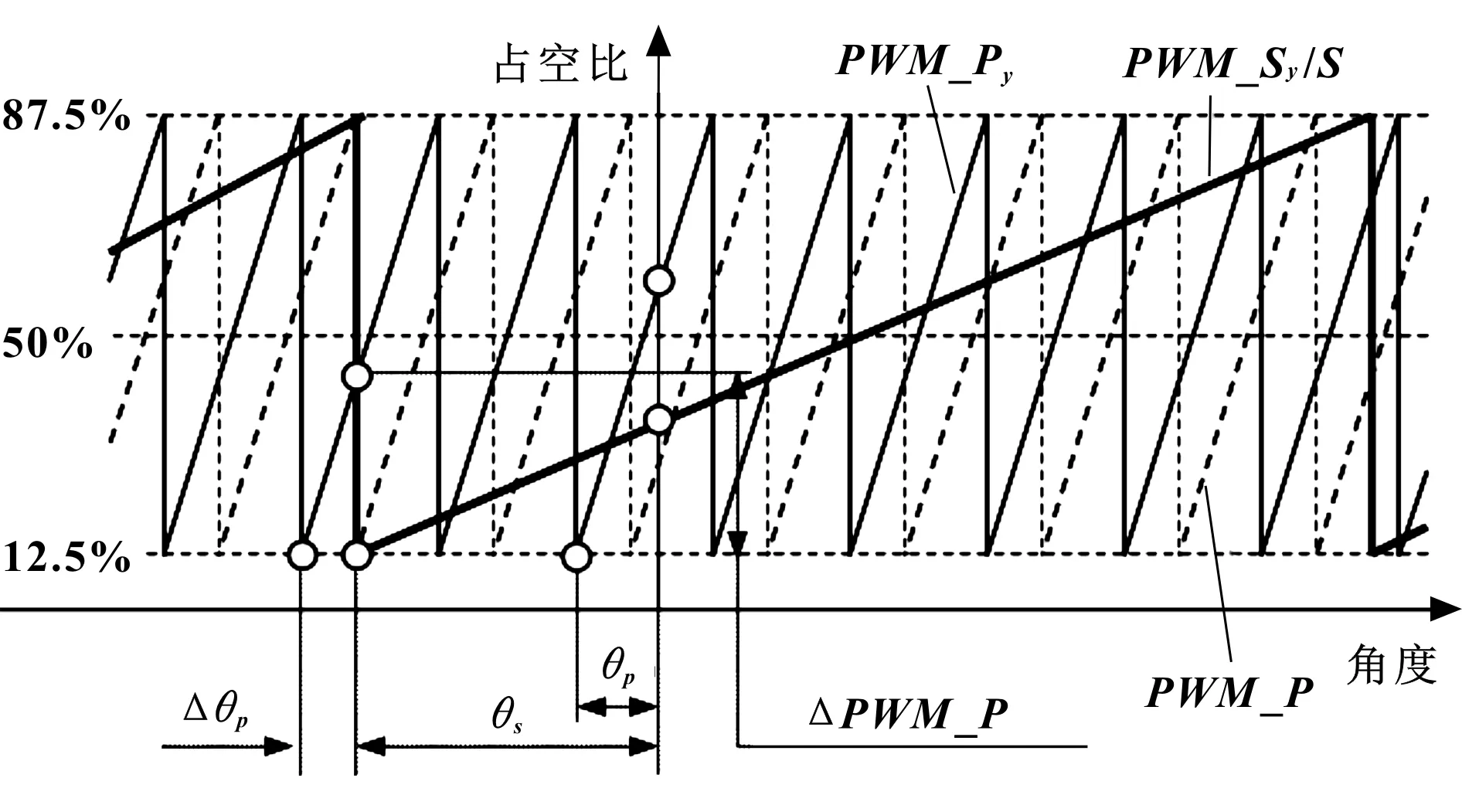
图5 单移Py至PWM_Sy12.5%重合标定特性曲线示意
如图5所示,PWM_Py特性曲线向右平移角度为Δθp时,可使Py1A点与Sy1点重合,在平移过程中会引起Py3A点逐渐下移,最后与Sy1点重合,使PWM下降所产生的差值为ΔPWM_P=PWM_Py3A-PWM_Py1A。
设Δθps=θs-θp,其中θp和θs的含义和计算方法与式(1)相同;参见图2和图5,Δθps代表了点Sy1和点Py1之间的角度差,它具有正负号,由此可计算PA区段中Py1A点距Py1点的整段倍数Kp,其逻辑算法为:
(5)
平移角度Δθp表达式:
Δθp=40°×Kp+θp-θs
(6)
对应Δθp的PWM差值表达式:
ΔPWM_P=75%×Δθp/40°
(7)
新构建PWM_P信号的补偿算法与式(3)相同,新构建PWM_S信号的补偿算法为:
PWM_S=PWM_Sy
(8)
3.3 单移Py至PWM_Sy50%重合标定——标定方式5
该标定代号为方式5,如图2所示,此标定方式是在PWM_Sy特性曲线位置不变的情况下,仅将PWM_Py特性曲线向右或向左平移,使Py2B点与Sy2点重合,即可由IC建立如图6所示新的虚拟特性曲线PWM_P(虚线部分)。
如图6所示,PWM_Py特性曲线向右或向左平移角度为Δθp时,可使Py2B点与Sy2点重合,在平移过程中会引起Py3B点逐渐下移或上升,最后与Sy2点重合,使PWM下降或上升所产生的差值为ΔPWM_P=PWM_Py3B-PWM_Py2B。
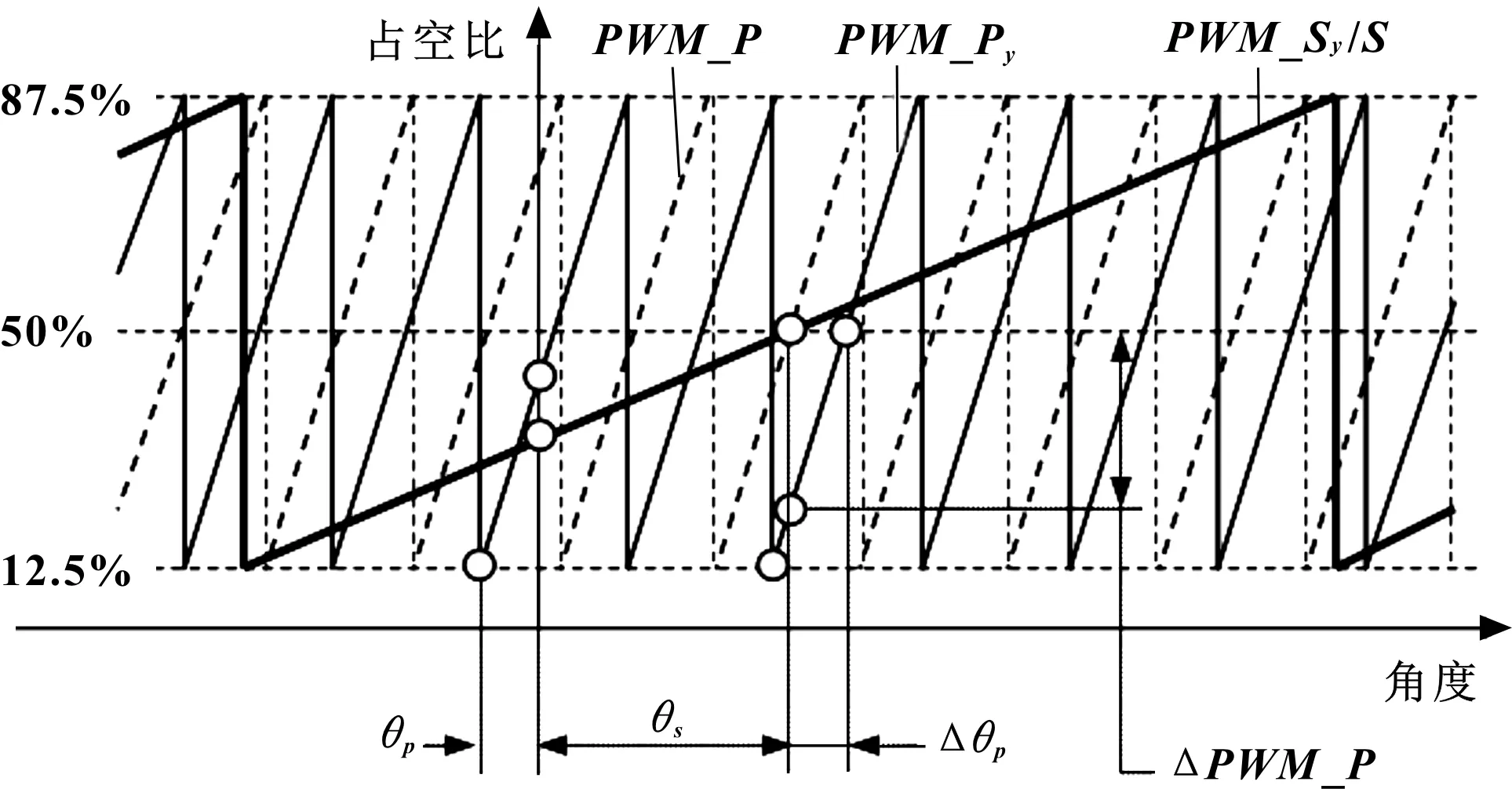
图6 单移Py至PWM_Sy50%重合标定特性曲线示意
设θps=θs+θp,其中θp的含义和计算方法与式(1)相同;参见图2和图6,θs代表了Sy0点指向Sy2点的角度值,它具有方向性,也有正负号,其表达式为:
θs=296°×(50%-PWM_Sy0)/75%
(9)
据此,再参见图2和图6,θps则代表了Py1点指向Sy2点的角度值,它具有方向性,也具有正负号(向右为正,向左为负),由此可计算PB区段中Py1B点距Py1点的整段倍数Kp,Kp同样具有方向性和正负号,其逻辑算法如下:
(10)
平移角度Δθp表达式:
(11)
对应Δθp的PWM差值表达式与式(7)相同。
新构建PWM_S信号的补偿算法与式(8)相同,新构建PWM_P信号的补偿算法为:
(12)
3.4 单移Sy至PWM_Py12.5%重合标定——标定方式7
该标定代号为方式7,如图2所示,此标定方式是在PWM_Py特性曲线位置不变的情况下,仅将PWM_Sy特性曲线向右平移,使Sy1点与Py1点重合,即可由IC建立如图7所示新的虚拟特性曲线PWM_S(虚线部分)。
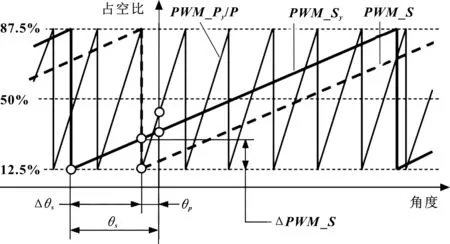
图7 单移Sy至PWM_Py12.5%重合标定特性曲线示意
如图7所示,PWM_Sy特性曲线向右平移角度为Δθs时,可使Sy1点与Py1点重合,在平移过程中会引起Sy3A点逐渐下移,最后与Py1点重合,使PWM下降所产生的差值为ΔPWM_S=PWM_Sy3A-PWM_Sy1。
设Δθsp=θp-θs,其中θp和θs的含义和计算方法与式(1)相同;参见图2和图7,Δθsp代表了点Sy1和点Py1之间角度差,它具有正负号,由此可计算SA区段中Sy1点距Py1点的整段倍数Ks,其逻辑算法为:
(13)
平移角度Δθs表达式:
Δθs=296°×Ks+θs-θp
(14)
对应Δθs的PWM差值表达式:
ΔPWM_S=75%×Δθs/296°
(15)
新构建PWM_P信号的补偿算法为:
PWM_P=PWM_Py
(16)
新构建PWM_S信号补偿算法与式(4)相同。
4 典型方式的标定结果
按以上4种典型方式实施标定,在同一个静态位置时,设静态初始点采样值均为:PWM_Py0=40%、PWM_Sy0=30%,其标定后仿真特性如图8—图11所示。

图8 标定方式1输出特性结果

图9 标定方式4输出特性结果
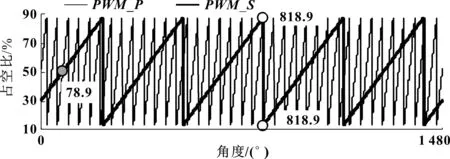
图10 标定方式5输出特性结果

图11 标定方式7输出特性结果
图8—图11中特性曲线均以静态位置为基准零点,向右展开至1 480°为止,还可理解为基准零点与1 480°角度点是首尾相连而循环的。其中实心点为标定的目标重合点,空心点为随动完成的特征点,所对应数值是以静态位置为基准零点的角度值。从图示中很容易看出,标定后角度信号特性曲线明显具有了3个特征点,均可作为基准点,依此传感器输出信号就具备了统一基准,说明4种典型标定方式均是有效的。
在实践中,标定完成后,还需由外置设备计算标定结果的游标可信度Vres(Vernier reserve),可表达为Vres=V(PWM_P,PWM_S),以此检验标定效果,其达标要求为Vres≥90%。
因PWM_Sy信号是由传感器内置磁性小齿轮激励霍尔芯片生成的,齿轮间的啮合存在间隙,并且其他机械匹配件之间也存在间隙等误差,甚至采样电路也会造成误差,综合PWM_P偏差为±0.03%、PWM_S偏差为±0.05%,这些误差因素均会对标定结果的游标可信度造成影响,其影响程度如表2所示。

表2 误差引起标定结果游标可信度Vres变化 %
在标定过程中,除了以上因素还包括设备环境因素,特别是振动也极大地影响标定效果,必须进行控制。综合后,信号波动应控制为PWM_P偏差±0.03%、PWM_S偏差±0.05%之内。
5 典型标定方式优劣分析
各种标定方式中PWM差值,均需由外置设备计算获得,无论其计算过程如何复杂,外置设备均有足够的配置来完成这些复杂计算,不会影响传感器在EPS系统中的工作。但标定之后,在EPS系统工作中,需由传感器内置IC按相应的补偿算法实时对PWM差值运算处理,对于复杂的补偿算法,就需要提升传感器IC运算能力才能适应,这不利于产品的成本控制。比较上述4种典型标定方式的补偿算法,其中“单移Py至PWM_Sy12.5%重合标定”方式4和“单移Sy至PWM_Py12.5%重合标定”方式7为较优,“单移Py至PWM_Sy50%重合标定”方式5为良好,而“Py和Sy双移至PWM12.5%重合标定”方式1,则不建议采用。
同时,PWM_Py信号随角度变化率为1.875%/(°)及信号频率为1 000 Hz,均高于PWM_Sy信号变化率0.253%/(°)及信号频率200 Hz,为便于补偿算法对原始角度信号能有较好的分辨率和信号频率,通常采取固定PWM_Sy信号的方式来实施标定,这样对PWM_Sy信号可直接采样使用,无需补偿,因此在典型标定方式中,方式4和5要优于其他方式。
因环境振动等因素,会引起PWM波动,也会引起采样点在12.5%和87.5%附近产生切换,该极限情况经仿真验证,仍符合表2所示的Vres变化规律,未出现异常,这说明振动等因素对文中所提出的4种典型标定方式和补偿算法的影响是等同的。
综合以上,标定方式4为最优。尽管如此,现EPS生产厂家为规避极限点的标定风险,仍继续沿用类似于方式5的传统方式来实施标定。
6 结束语
(1)角度传感器被EPS系统装配后,经上电初始化,即可产生PWM信号,称为原始角度信号,是不可用的,因此需进行标定,来构建新的有统一基准的PWM_P和PWM_S信号,与原始角度信号等效对应,此时传感器输出即是可用的角度信号,ECU再通过适当的算法对角度就能识别了。
(2)不同标定方式,需与其对应的补偿算法匹配,不能混用。在生产过程中,若采用了某种标定方式,需通过外置设备将其对应的补偿算法也写入传感器IC中;同时,还需控制好相关影响因素,以便达到标定效果,使游标可信度指标大于90%。
(3)补偿算法的复杂程度,决定了对传感器IC运算能力需求。尽管目前传感器IC能力已能适应上述所有算法,但不利于成本控制。推行本文最优“单移Py至PWM_Sy12.5%重合标定”方式4,还需传感器厂商进行配合,在供货时将对应补偿算法写入IC中。
