巴哈赛车线控转向系统设计
2021-05-28李千也周罗燚常虎卞毅杰周天俊
李千也 周罗燚 常虎 卞毅杰 周天俊


摘要:由于目前竞争环境的激烈,巴哈赛车作为一项广泛运用于工程院校的教学项目,集合汽车设计、营销、成本预算等方面为一体,更需要精益求精,才能脱颖而出。巴哈大赛中存在问题较多的地方在转向系统,从而需要对赛车的转向系统进行优化设计,因此,本小组以转向系统作为着手点,对巴哈赛车的部分性能进行优化。传统的机械转向系统中,转向盘与前轮通过转向柱连接,传动比固定不变,不能适应不同的路况,而通过线控转向控制可以根据车辆进行设计,提高车辆回正性、稳定性和转向性。本文首先从根据汽车传统的转向系统,设计新的线控转向方案,再对汽车线控转向系统的执行机构算法改良,建立汽车的线控转向系统模型,然后通过仿真软件对线控转向系统进行实验仿真,最后对整体的模态做静力学分析,验证设计的合理性。
关键词:线控转向;仿真模拟;理想传动比设计
中图分类号:U463.33 文献标识码:A 文章编号:1674-957X(2021)08-0024-04
0 引言
大学生巴哈比赛是一项针对汽车及相关专业院校参加的越野车设计制造和检测的比赛,其对于赛车的运动情况十分严格,尤其是四小时的耐久赛,耐久赛赛道设置了很多转弯赛道,以及不同的连续坡度弯道等,所以合理设计转向方案并满足赛车的转弯要求显得十分重要。同样因为赛事成立不久,许多学校的设计方案并不十分成熟,在赛车转弯或过坡道的时候存在很多问题,例如转向时转向盘转角与车轮实际转向角度的实际匹配方面的问题和所需力矩的大小不定问题,导致赛车轮转向过程中出现故障。本文立足该问题,提出了线控转向的解决方案,并设计约束函数,和不同情况下的传动比转化方案,对转向角度方面的函数进行优化设计,并进行了软件仿真,从而为巴哈赛车转向系统的设计提供参考。
1 转向系统与理想传动比设计的现实意义
线控转向系统通过设计控制器的控制原理,既能实现汽车驾驶的个性化,也能够通过改变传统转向机构的机械连接来提高驾驶安全性,减少了撞车事故中对驾驶员健康的危害,并能通过路感的识别与检测,通过执行机构和传感器来反馈路感信息,包括转向力矩等,以此驾驶员便于调整力量的大小和传动比调整,同时适应不同的驾驶环境,通过软件恰好能够模拟还原相应的真实情况,并做出分析判断,同时线控技术的智能化能根据大数据的经验来判断汽车的行驶情况,并判断驾驶员的操作合理性根据实验经验来做出回正调整,实现双重保障,对偏离轨道的车辆及时进行稳定的控制,做出调整,由于取消了机械转向柱的链接,使汽车内的活动空间更大,提高了驾驶员的舒适性和操作稳定性,也因此,路面上的不平对轮胎的不平衡性也不会传递到传递机构上,能够有效延缓驾驶员的疲劳程度,并且能够通过传感器反馈信号来检测路况和行驶状态,加强对车轮主动轮的控制,便于驾驶员操作。线控转向系统的容错率也较为良好,由于冗余和容错技术的采用,在系统中,当部分电子零件出现故障时,系统会转为主动控制,仍能实现最基本的控制转向功能,改善了驾驶的性能体验,对于车辆速度,转向传动比不断变化,实现低速时转向的灵敏響应等。
通过研究巴哈赛车转向的特性,设计对应的转向算法,包括转向角度、横摆角速度、侧向加速度、不足转向特性等,并调整转向机构设计,借助软件进行仿真模拟与改进。理想传动比的设计能够改善汽车的行驶安全性,并给人足够的反应时间。进行仿真实际检验,并分析反馈信息。
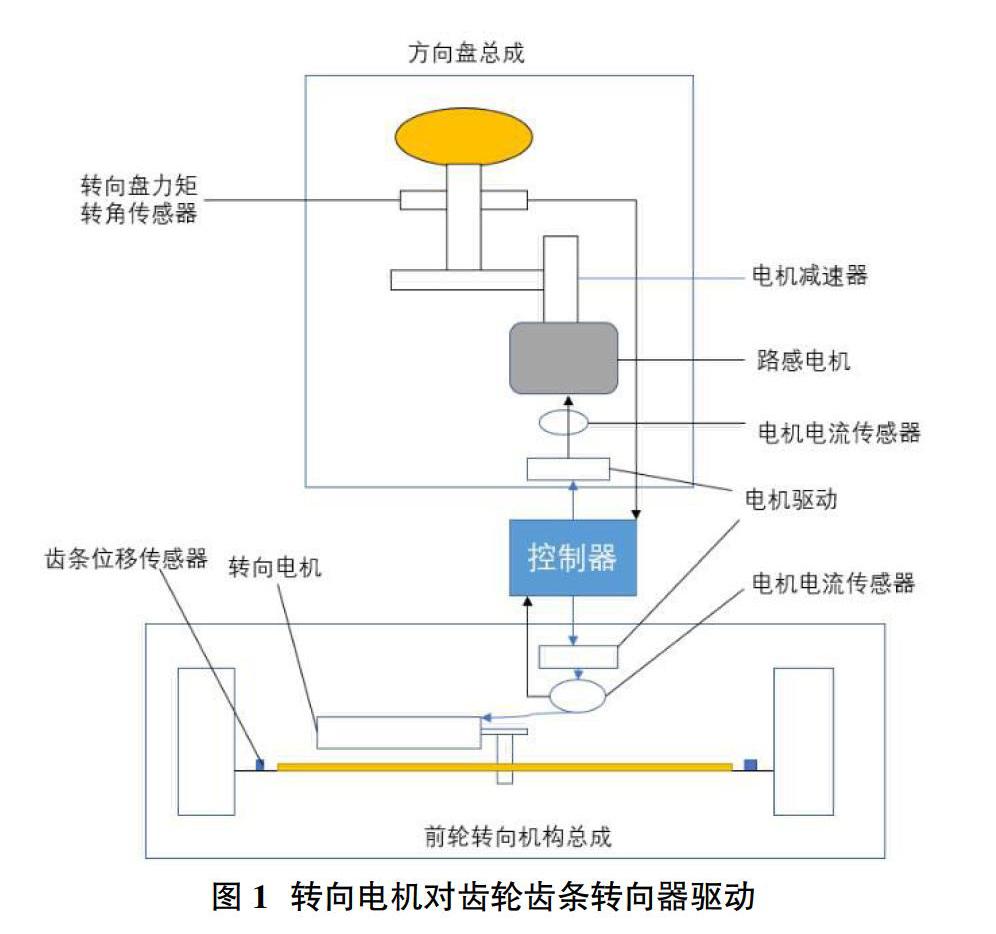
线控转向系统的发展在无人驾驶技术层面有较深层的应用,并有多种实现方式,比如主动轮的线控转向和四驱的线控转向。其中主动轮的线控转向又被分成多种,比如,汽车轮毂对电机形成的牵引力会使绕主轴的转向力矩产生,通过万向节对转向梯形传递力矩,实现汽车的转向,或者利用两个相对独立的电机分别对汽车左右两个轮胎进行驱动,完成转角。在当前比较常用的线控转向系统中,采用的是转向电机对齿轮齿条转向器驱动的方式,具体结构如图1所示。
2 转向机构的设计和函数分析设计
2.1 设计理念
在传统的机械转向系统中,方向盘和转向轮通过传动机构和操舵装置连接在一起,操作不便,且传动比固定,在面对较为复杂的路况时,转型盘所需力矩较大,不利于操作,安全性较差,这种纯机械结构结构简单、可靠性好,但传动比的变化范围有限,在助力系统转向的作用下,汽车的轻转向问题才被解决。
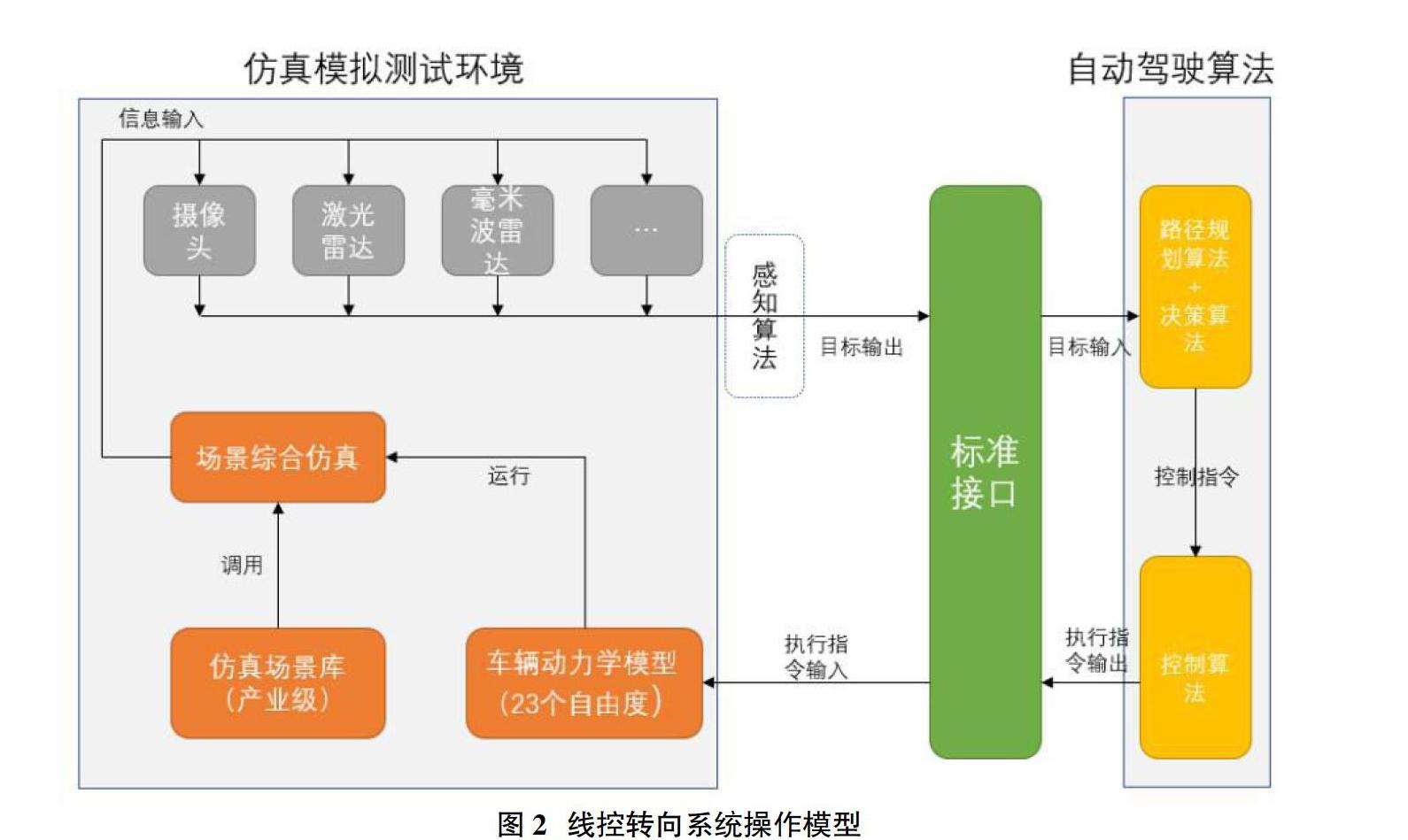
所以这次选择了线控转向系统为实物转向模板,如图2所示,借助其执行机构的转向可变性设计相应的算法,来改变实际操作中转向盘扭角和主轮实际转动角。
通过实验结果表明,车辆在高速时,灵敏度较高,相应的所需的传动比较小;车辆在低速行驶时,灵敏度较小,转向反应也就较慢,所需的传动比较大。
2.2 理想传动比的设计思路
为了实现不同车速下理想的传动比,根据理想传动比理论特性可知,侧向加速度a的值和车辆传动比有一定的相关联系,a的值越小,传动比的成长性越快,此外还发现其他参数对于车辆实际响应速度的影响,并设计了中间值,以反应时间为测量依据,约束了横摆角度、横摆加速度增益、不定量因素等,同时为了保证汽车在实验模拟中正常操作,以及实际道路上,车辆的操作稳定性和安全性,调整转向特性,并分析出了线控转向系统的传动比与横摆角速度及反应时间需满足如下的条件:
①现实生活中,汽车低速转向时,其传动比小,转向盘对于车轮主动轮的灵敏度较差,使得其车速变化慢,高速转向时,传动比大,随着车速的增加,转向灵敏度增加,其转弯变化加快,为了保证高速转向时的转向的操纵稳定性以及满足低速和高速对传动比的不同的要求,设计可识别路况和车速变化的传动比,并根据结果,增大传动比在不同速度的梯度范围,使得车辆能够更好的适应路况做出转向反应。
②以驾驶技术一般的驾驶员为测量目标,其对路况的反应时间一般为0.1-0.5s,对复杂路况的反应为1-3s,对复杂路况进行认知并做出判断的反应时间为3-5s。根据对转向系统角位移传动比的要求,本次实验数据取中间值。并且在已知车速v情况下,当横摆角速度增益和侧向加速度增益为定值时,汽车的操纵更加简单方便也便于数据的测量。并且设置前轮转角不超过其极限值,并确定转向传动比的波动范围,其最小值为9.6,这样在保证转向盘在极限转角角度时也更轻便的转向,按照理想传动比的设计规律,需要设置速度分界值来衡量速度的大小,便于观察系统判断车辆转弯时的传动比选择,本次初始速度临界值设为30km/h。
3 算法设计及仿真
3.1 仿真操作
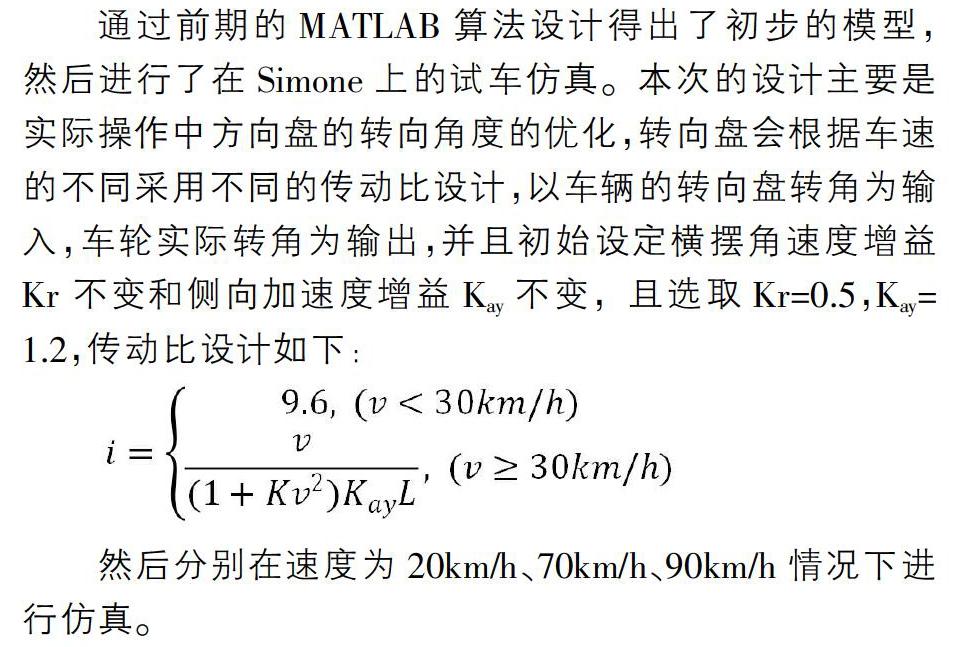
通过前期的MATLAB算法设计得出了初步的模型,然后进行了在Simone上的试车仿真。本次的设计主要是实际操作中方向盘的转向角度的优化,转向盘会根据车速的不同采用不同的传动比设计,以车辆的转向盘转角为输入,车轮实际转角为输出,并且初始设定横摆角速度增益Kr 不变和侧向加速度增益Kay不变,且选取Kr=0.5,Kay=1.2,传动比设计如下:
然后分别在速度为20km/h、70km/h、90km/h情况下进行仿真。
3.2 结果分析
实验结果表明,当车辆行驶速度小于 30km/h 时,为了满足低速转向的要求,要求车辆转向系统的角传动比为 9.6,且传动比随车速的增加而增大。中速度行驶时,其传动比有上升趋势,高速行驶时,其传动比较大,按照仿真结果能够给与驾驶者足够的反应时间。
本次实验是在侧向加速度响应和横摆角速度响应增益不变的情况下的仿真曲线,仿真结果表明,在恒定横向加速度增益的理想传动比在低速范围内变化不明显,高速时最大传动比始终小于 22,不能达到理想传动比要求,尝试改变横向加速度增益,使其随着速度的增大而增大,在速度为100km/h时,传动比近似为26,所以相较之下,变化的横向加速度增益更加符合设计要求。同时考虑侧向加速度增益的影响关系,其与车速成反比,初始设置数值对传动比的影响较小,经过实验表明,其对传动比的影响基于实际车速的改变,车速不变,传动比较大,其数值越小,并且初始设置值满足设计要求。以此还得出优化结果:设计正常的操作环境,设定各项增益满足设计要求,车速在相应路段逐渐增加。
软件介绍:51Sim-One是51WORLD自主研发的国内首款拥有自主知识产权的智能汽车虚拟仿真工具。51Sim-One虚拟仿真工具应用于各类自动驾驶系统共性技术的研发,为智能决策控制、复杂环境感知、人机交互与共驾,车路协同与网络通讯等提供了安全可控的全要素多层级的测试与评价技术支撑。同时,51Sim-One的仿真引擎已拓展服务于智慧城市交通系统、交通环境仿真、智慧道路设施部署与监控、无线网络建设评估等领域。
实验结果如下,选择C++和Python,开发环境可以为 Windows 10 或 Linux(建议Ubuntu16.04)这里以C++的代码curvesimple作为参考,如图3操作平台。
信息输入部分:
獲得api接口处的传感器信息
std::unique_ptr<SimOne_Data_Gps> pGps=
std::make_unique<SimOne_Data_Gps>();
信息初始化加载
while (1) {
SimOneSM::GetGps(0, pGps.get());
if (SimOneSM::IsCaseStart() && (pGps->
timestamp > 0)) {
printf("SimOne Initialized\n");
break;
}
printf("SimOne Initializing...\n");
}
设置测试的起点(startPt)和终点坐标(endPt)的地图,如图4。
std::unique_ptr<SimOne_Data_Gps> pGps =
std::make_unique<SimOne_Data_Gps>();
SSD::SimPoint3D startPt, endPt;
if (SimOneSM::GetGps(0, pGps.get()))
{
startPt.x = pGps->posX;
startPt.y = pGps->posY;
startPt.z = pGps->posZ;
}
SimOne_Data_WayPoints_Entry terminal;
if (SimOneSM::GetTerminalPoint(&terminal))
{
endPt.x = terminal.posX;
endPt.y = terminal.posY;
endPt.z = 0;
}
设置初始化过程的默认时间,并将这个变量作为参数赋予SimOneSM::LoadHDMap对象得到测试过程中每一时刻测试对象的瞬时位置坐标,以便于测试完成后对于数据的分析和处理。
int timeout = 20;
SimOneSM::LoadHDMap(timeout)
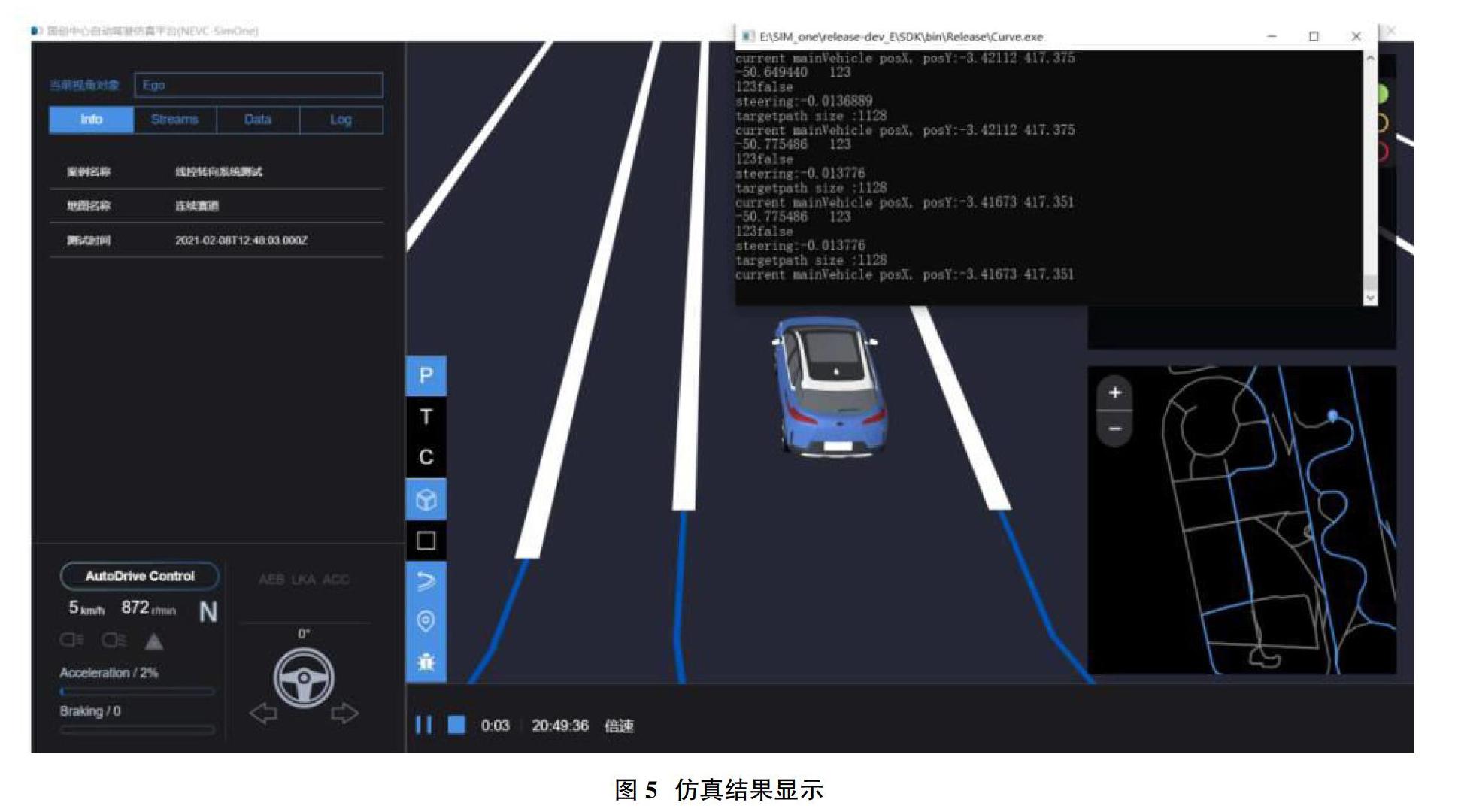
根据起点和重点坐标规划测试过程的行动路线如图5所示。
SSD::SimVector<long> naviRoadIdList =
GetNavigateRoadIdList(startPt, endPt);
设计结果表明,完全通过各个弯道,且反应时间均在范围内,对于相应的复杂路段也能轻量转向并通过。此外作为延伸,还进行了相应的行驶路线规划,依照实际生活中的各个行驶路线,以及实际场地的路感模拟,根据路况设计了应对的方案,代码如下:
巴哈赛车线控转向自动驾驶算法部分:
①条件终止条件判断,在测试过程设置标准,当在测试运行过程中不滿足预期时终止测试的。
if (SimOneSM::IsCaseStop()) {
break;
}
②通过API调用SimOneSM::LoadHDMap地图获得测试对象的瞬时位置,路况信息。这里对每一个道路进行了编号,通过不同编号来识别道路,得到小车的相对位置。并且‘if (!SimOneSM::GetGps(0, pGps.get()))’对象可以时刻监督信号连接的准确性,以保证实验的准确性和合理性。
SimOneSM::GetGps(0, pGps.get());
std::cout << "targetpath size :" << targetPath.size() << std::endl;
std::cout << "current mainVehicle posX, posY:" << pGps->posX << " " << pGps->posY << std::endl;
if (!SimOneSM::GetGps(0, pGps.get())) {
std::cout << "Fetch GPS failed" << std::endl;
}
③引入对象‘controlPtr.get()’帮助测试过程中对油门和速度进行控制
controlPtr->timestamp = pGps->timestamp;
SimOneSM::SetDrive(0, controlPtr.get());
主要是针对一些复杂的路况,包括较大难度的转弯等等。
4 结语
本文通过设计传动比变化函数,并设计各个参量的合理值,对转向器执行机构的改进,对线控转向系统的工作稳定性进行了初步研究,优化和提高了赛车的转向传动比。参照理论函数设计理想传动比,并设计出了在平台上进行了仿真模拟,同时对操纵稳定性进行了客观评价和仿真验证,尤其是变角传动比操纵稳定性。函数结果还存在一定的偏差,可能是偏转角度、不足转向特性等约束条件还不够完善。但基于优化的线控转向系统,巴哈赛车可以拥有更佳的稳定性,相信它在特定的比赛中能表现出更优秀的性能。
参考文献:
[1]徐锐良,曹青梅.车辆转向梯形机构的参数优化[J].拖拉机与农用运输车,2008,35(1):38-40.
[2]宋志强,史青录,于慧艳,等.基于 MATLAB 的转向梯形结构参数分析及优化设计[J].汽车工程师,2013(12):24-27.
[3]过学迅.汽车设计[M]. 北京:人民交通出版社,2013.
[4]杨胜兵.线控转向系统控制策略研究[D].武汉:武汉理工大学,2008:49-70.
[5]郑宏宇.汽车线控转向路感觀与主动转向控制策略研究 [D].吉林大学,2009.
[6]吴蒙.无人驾驶汽车线控转向系统控制的研究[D].湖南大学机械与运载工程学院,2016.