变电站巡检机器人路径规划策略
2021-05-27张永涛于倩倩
张永涛,徐 潇,于倩倩
(国网河南省电力公司周口供电公司, 河南 周口466000)
变电站巡检机器人作为信息获取和运维的重要手段,逐渐走向变电站巡检行业的多种应用场合,实现更加复杂、多样的巡检任务。根据变电站巡检机器人运行工况的不同,有针对性地规划巡检路线,将有效提高巡检机器人的工作效率,有助于运维人员快速掌握设备的运行情况。
1 巡检路线规划
1.1 协助应急处理
机器人巡检模式下,当无人值守变电站设备状态发生改变时,或获得系统告警信息后,运维人员可以在后台调用巡检机器人,快速到达指定设备间隔,及时查看设备状态并核实告警信息;当无人值守变电站发生事故时,运维人员可在后台指挥机器人深入事故现场,快速定位故障区域,实时读取现场数据[2]。
巡检路线规划时,以环境电子地图的中心点为坐标原点,建立主直角坐标系,借助巡检机器人在地图上的起点和终点,确定辅助坐标系的原点,建立辅助直角坐标系,最后,根据巡检机器人起点和终点的位置分布,判断它们在两个坐标系中的象限位置,获取交集作为搜索区域[3]。
在限定的搜索区域内,采用Dijkstra算法寻找起点到终点的最短路线。设起点为u0,终点为v0,已求出最短路径节点的集合用S表示,其余未确定最短路径节点的集合用T表示。Dijkstra算法的基本思想是:按照距离u0由近及远的顺序,依次求得u0到图中的各节点的最短路线和距离,直至终点v0,算法结束[4]。算法步骤如下:
初始条件下,集合S中只包含起点u0,集合T中包含除起点外的其他节点,且T中节点距离的定义为起点u0到该节点的长度;
从集合T中选出距离最短的节点k,并将节点k加入到集合S中,从集合T中移除节点k;
利用节点k来更新T中各个节点到起点u0的距离。节点k作为中间节点,若T中各节点距离缩短,则采用新的距离值,否则各节点保持原来的距离;
重复步骤(2)、步骤(3),直到终点v0。
协助应急处理时,变电站巡检机器人路线优化流程如图1所示。

图1 基于Dijkstra算法的巡检路线优化流程图
1.2 缺陷定点跟踪
对于受环境、电网负荷等影响,工作状态变化较大的动态缺陷,可以充分利用机器人属地化以及巡检频率高的优势,对缺陷进行跟踪记录[2]。
当变电站内存在缺陷的设备数量较多时,机器人巡检路线规划属于图论中的旅行商问题,研究人员通常采用遗传算法、模拟退火算法等对上述问题进行求解[3,5]。
画出变电站巡检机器人巡检道路拓扑图,采用图论中Dijkstra算法,求解任意两节点之间的最短距离矩阵;
对缺陷设备进行编号,并求解任意两个缺陷设备之间的最短距离,构造最短距离矩阵。假设巡检道路上存在缺陷设备A和B,其位置如图2所示,缺陷A 邻近的节点为A1 和A2,缺陷B 邻近的节点为B1 和B2,不同缺陷设备的邻近节点两两组合,共有4 种方案,综合考虑各缺陷设备到邻近节点之间的距离,最终得到两个缺陷设备之间的最短距离。

图2 两个缺陷设备之间最短距离计算示意图
采用智能算法对缺陷设备的巡检顺序进行优化排序,得到近似最优巡检路线。
变电站巡检机器人缺陷定点跟踪路径规划流程如图3所示。

图3 缺陷定点跟踪路径规划流程
1.2 全站全巡
变电站巡检机器人携带可见光相机、红外热成像仪对变电站开展例行巡视和全站红外测温。国家电网有限公司对变电站巡检周期的要求如下:一类变电站每2天至少巡检1次,二类变电站每3天至少巡检1次,三类变电站每周不少于1次[2]。
为了提高巡检机器人的作业效率,运维人员需要对机器人的巡检路线进行规划。画出变电站巡检机器人巡检道路拓扑图,对断头路进行简化处理。连通图中各节点关联边的个数称为该节点的度,度为奇数的节点称为奇点,度为偶数的节点称为偶点。当奇点的个数为0 个时,机器人巡检路线可以“一笔画”,否则,需要对奇点进行配对,构造欧拉图。采用枚举法或奇偶点图上作业法对奇点进行配对优化,降低机器人重复行走距离[6,7]。
巡检道路拓扑图中各节点均为偶点时,采用Fleury 算法对变电站巡检机器人全站全巡路线进行规划设计。Fleury 算法的基本思路是:依次描画一条边,在描画过程的每一步,除非别无选择,否则不走回头路,不过独木桥。算法步骤如下[4]:
(1)设G为无向欧拉图,v代表点,e代表线,任取G中一顶点v0,令P0=v0;
(2)假设沿Pi=v0e1v1e2v2...eivi走到顶点vi,按下述方法从E(G)-{e1,e2,...,ei}中选ei+1:
(a)ei+1与vi相关联;
(b)除非无别的边可供选择,否则ei+1不应该是Gi=G-{e1,e2,...,ei}中的桥。
(3)当步骤(2)不能再进行时,算法停止。
2 机器人避障
在机器人巡检过程中,需要对外界不确定性环境进行感知,其中包括躲避站内人员、设备及其他障碍物。
机器人避障行为可分为停障和绕障两种方式[1]。停障是指当机器人探测到行进路线上一定距离内有障碍物阻挡时,机器人发出并执行减速制动指令,待障碍物清除后继续行进;绕障是指巡检机器人尝试直接绕过障碍物而继续行进的避障方式。
障碍物通常可分为静止障碍和移动障碍两种。躲避静止障碍可通过人工场势法来实现[8],在势场中障碍物对机器人产生斥力,距离越近,斥力越大;目标点对机器人产生引力,引力与斥力相反,距离越近,引力越小,当机器人到达目标点时引力为零。通过设置最小安全距离来计算斥力、引力和合力,从而实现机器人的自主避障。
在移动情况下,常见的障碍物与机器人存在相遇和穿越行为。相遇行为是面对面的运动,即障碍物与机器人前进方向相反;穿越行为是垂直运动,即机器人前进的方向有障碍从面前穿越。躲避移动障碍可采用基于模糊逻辑理论的避障方法[9],该避障方法是用Mandani 推理法得到一个精确的速度变化量,当障碍物与机器人之间存在一定距离时,机器人按照一定速率逐步减速到最低速度,待障碍消失或者距离大于安全距离时,机器人再逐步加速到正常值,继续完成巡检任务。
3 无线充电技术
现有变电站巡检机器人通常采用接触式方式进行充电,该充电方式对充电接口质量、机器人导航能力要求较高,需要建造单独的充电室[10]。变电站巡检机器人目前配置电池的充电时间为8 h,满电状态下只能连续工作6 h。在500 kV 变电站,巡检机器人对全站设备完成1次巡检需要3天,满足不了实际要求[11]。电池容量不足、充电速度慢制约着变电站巡检机器人巡检作业效率的提升。
应用于机器人领域的中功率无线充电技术为电磁感应式,利用初级线圈和次级线圈在空气中的耦合进行能量传输,充电功率为50~1000 W[1]。机器人无线充电装置由发射端和接收端两大部分组成,发射端位于充电基座内,接收端安装在机器人底部,充电基座埋设于机器人巡检道路下,如图4所示。
当系统检测到巡检机器人电量不足时,就近选择无线充电基座,当机器人靠近充电基座时,开启充电模式,充电完成后继续开展巡检作业。
4 结束语
本文主要研究了变电站巡检机器人在协助应急处理、缺陷定点跟踪、全站全巡时的巡检路线规划方法,并对巡检机器人避障策略进行了总结。巡检机器人续航能力不足制约着机器人路线规划以及作业效率的提升,无线充电技术的发展将对变电站巡检机器人的应用产生深远影响。
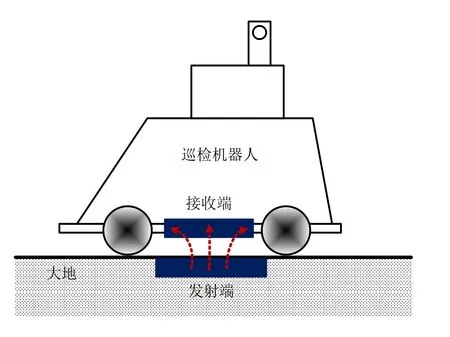
图4 巡检机器人无线充电示意图
